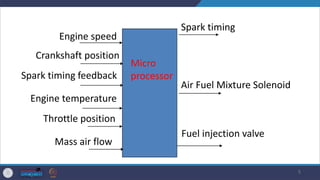
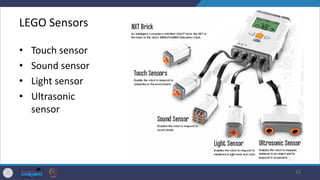
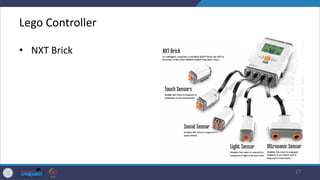
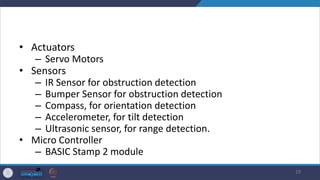
Mechatronics systems combine mechanical, electrical, and computer systems. Examples include engines that use sensors and microprocessors to control ignition timing and fuel injection. Copy machines also use sensors, actuators, and microprocessors to scan documents, transfer images to paper using ink, and sort copies. LEGO kits allow building mechatronic robots using sensors like touch and light that provide input to microcontrollers, while actuators like motors perform tasks. Simulation helps analyze complex mechatronic designs without full construction. The future of mechatronics involves more integrated systems across many fields.