Downloaded 85 times







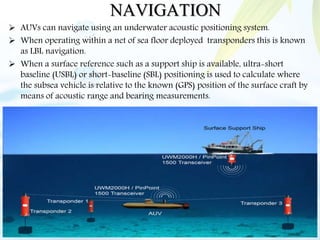

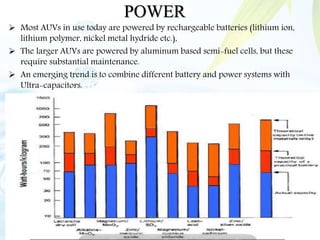

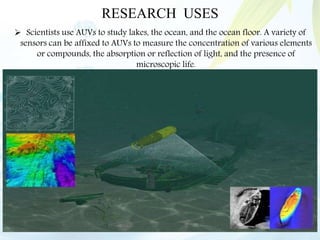



This document provides information about autonomous underwater vehicles (AUVs). It discusses that AUVs are robotic devices that are controlled and piloted by onboard computers to perform underwater survey missions. They use various sensors like DVL, CTD, side-scan sonars, and magnetometers to navigate autonomously and map ocean features. AUVs can navigate using acoustic positioning systems when operating within a net of seafloor transponders or using ultra-short baseline positioning relative to a surface ship's GPS position. They are powered primarily by rechargeable batteries and propelled by propeller-based thrusters. AUVs have commercial uses in mapping seafloors for oil/gas infrastructure and military uses like mine























































































