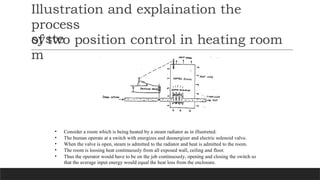
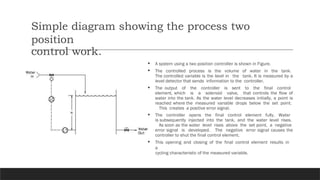
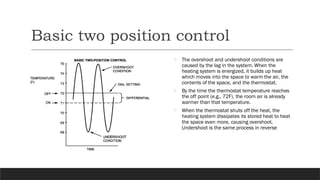
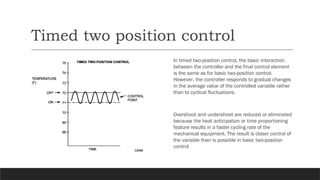
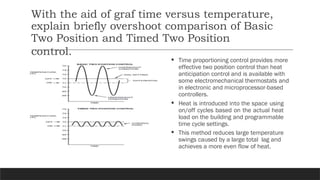
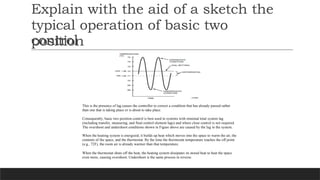
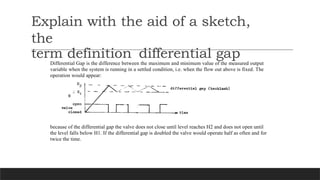
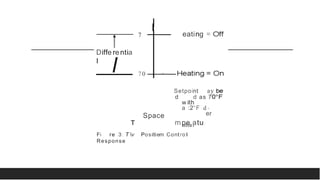
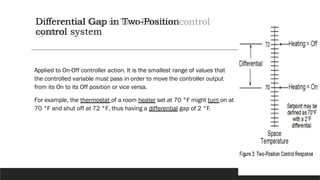
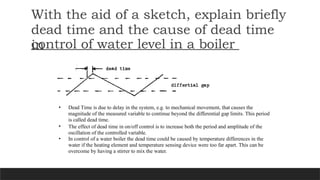
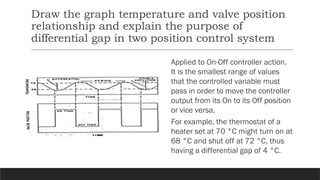
The document discusses two-position control systems, which are on-off controllers used for managing devices like heaters and water levels in tanks through simple control loops. It explains the operation, advantages, and limitations of both basic and timed two-position controls, highlighting concepts such as overshoot, undershoot, differential gap, gain, and offset in control systems. Additionally, it addresses factors affecting control response, like dead time and system lag.












![PLC Ladder Programming [Mechatronics]](https://cdn.slidesharecdn.com/ss_thumbnails/plc-ppt-snteli-200503070616-thumbnail.jpg?width=640&height=640&fit=bounds)