Probablistic LSA(pLSA)
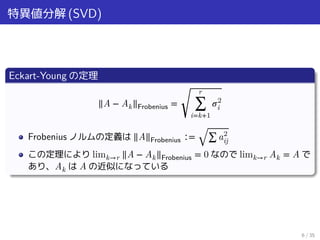
Graphical model
文書d(∈ D) と語 w(∈ W) は、トピック z(∈ Z) を介して条件付き独立
文書数を M(= #
D)、語数を N = #
W とし、文書中の語ごとにトピック
があると仮定
p(d, w) は非対称なモデル (a) でも対称なモデル (b) でも表現・実装可能
M (= #D)
N (= #W)
z wd
(b) symmetric model
M (= #D)
N (= #W)
z wd
(a) asymmetric model
Figure: Graphical model of pLSA
11 / 35
12.
Probablistic LSA(pLSA)
LSA andpLSA
P ∶= (p(di, wj)), U ∶= (p(di|zj)) ∈ M(#
D, #
Z), V ∶= (p(wi|zj)) ∈
M(#
W, #
Z), 𝛴 ∶= ⊕ p(zi) ∈ M(#
Z, #
Z) とおくと、P = U 𝛴t
V
条件付き独立の仮定により、uij はトピック j から文書 i が現れる確率、
vij はトピック j から語 i が現れる確率となり、U, V の成分を明瞭に解
釈可能
(どの成分も確率なので、負の値も現れない)
トピック Z から語 W が語毎に生成されるので、文書に複数のトピック
が含まれることを許容
最尤推定を用いるので、最適化の根拠が明瞭
EM-algorithm は局所解に陥りうるが、tempering により緩和可能
EM-algorithm の反復に必要な計算量は、SVD に比べてさほど多くない
12 / 35
Reference I
David Andrzejewski.Expectation Maximization. url:
http://pages.cs.wisc.edu/~andrzeje/research/em.pdf.
David M. Blei, Andrew Y. Ng, and Michael I. Jordan. “Latent Dirichlet Allocation”. In:
J. Mach. Learn. Res. 3 (2003), pp. 993–1022. url:
http://jmlr.org/papers/v3/blei03a.html.
Thomas L. Griffiths and Mark Steyvers. “Finding scientific topics”. In: Proceedings of
the National Academy of Sciences 101 (2004), pp. 5228–5235. doi:
10.1073/pnas.0307752101.
Thomas Hofmann. “Probabilistic Latent Semantic Analysis”. In: Proceedings of the
Fifteenth Conference on Uncertainty in Artificial Intelligence. 1999, pp. 289–296.
Thomas Hofmann. “Probabilistic Latent Semantic Indexing”. In: Proceedings of the
22Nd Annual International ACM SIGIR Conference on Research and Development in
Information Retrieval. 1999. doi: 10.1145/312624.312649.
Thomas Hofmann. “Unsupervised Learning by Probabilistic Latent Semantic Analysis”.
In: Machine Learning 42 (), pp. 177–196. doi: 10.1023/A:1007617005950.
Liangjie Hong. A Tutorial on Probabilistic Latent Semantic Analysis. 2012. url:
http://arxiv.org/abs/1212.3900.
39 / 35






![Probablistic LSA(pLSA)
Probablistic LSA(pLSA)
文書 d と語 w の結合確率を、トピック集合を Z として次のようにモデル化
(図 1(a))a
p(d, w) = ∑
z∈Z
p(d, w, z)(∵Z について周辺化)
= p(d) ∑
z∈Z
p(w, z|d)
= p(d) ∑
z∈Z
p(w|z, d)p(z|d)
= p(d) ∑
z∈Z
p(w|z)p(z|d)(∵d と w は条件付き独立)
d と w は条件付き独立だと仮定
p(d) という謎の確率が存在 (文書 d が観測される確率?)
a
Hofmann による論文のうち、[4][5] より [6] が詳しい。 9 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-9-320.jpg)



![Probablistic LSA(pLSA)
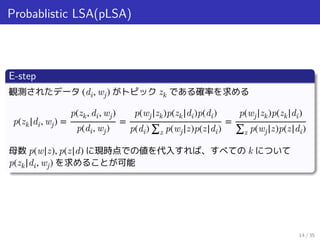
EM-algorithm
母数 p(zk|di, wj), p(di), p(wj|zk), p(zk|dj) を最適化するため、逐次的に最尤推
定を行う [6][7]
1 p(zk|di, wj), p(di), p(wj|zk), p(zk|dj) を適当な値に初期化
2 E-step(expectation)
p(zk|di, wj) を計算
3 M-step(maximization)
p(di), p(wj|zk), p(zk|dj) を計算
4 E-step へ戻る
13 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-13-320.jpg)
![Probablistic LSA(pLSA)
M-step
観測データが現れる確率 (尤度)L を最大化 (d での w の出現頻度を n(d, w)、
d の語数を n(d)(= ∑ n(d, w)) とする)
log L ∶= log p((d1, w1), ⋯ , (dN , wn(dN))) = log
∏
i
∏
j
p(di, wj)n(di,wj)
= ∑
i
∑
j
n(di, wj) log p(di, wj)
= ∑
i
∑
j
n(di, wj) log p(di) ∑
k
p(wj|zk)p(zk|di)
対数尤度の期待値は、
Eq[log L] = ∑
i
∑
j
n(di, wj) ∑
k
p(zk|di, wj) log p(di)p(wj|zk)p(zk|di)
= ∑
i
∑
j
n(di, wj) ∑
k
p(zk|di, wj)(log p(di) + log p(wj|zk) + log p(zk|d
15 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-15-320.jpg)
![Probablistic LSA(pLSA)
M-step (cont.)
制約条件 ∑i log p(di) = 1, ∑j log p(wj|zk) = 1, ∑k log p(zk|di) = 1 の下で
Eq[log L] を最大化するので、 𝜆, 𝜏k, 𝜌i を Lagrange 乗数として、
H ∶= Eq[log L] + 𝜆(1 − ∑
i
log p(di))
+ ∑
k
𝜏k(1 − ∑
j
log p(wj|zk)) + ∑
i
𝜌i(1 − ∑
k
log p(zk|di))
これをそれぞれの母数で偏微分すると、H が最大となるとき、
𝜕
𝜕p(di)
H = ∑
j
n(di, wj) ∑
k
p(zk|di, wj)
p(di)
− 𝜆 = 0
𝜕
𝜕p(wj|zk)
H = ∑
i
n(di, wj)
p(zk|di, wj)
p(wj|zk)
− 𝜏k = 0
𝜕
H = n(d , w )
p(zk|di, wj)
− 𝜌 = 0 16 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-16-320.jpg)


![Probablistic LSA(pLSA)
Remark
Hofmann[6] では p(d) ∝ n(d) という近似を用い、p(d) を定数として
扱う
Hofmann[4] では z → d, z → w のモデルを用い、
p(z|d, w), p(z), p(d|z), p(w|z) を母数として最適化。M-step の更新式は、
p(zk) =
∑i ∑j n(di, wj)p(zk|di, wj)
∑i n(di)
p(wj|zk) =
∑i n(di, wj)p(zk|di, wj)
∑j ∑i n(di, wj)p(zk|di, wj)
p(di|zk) =
∑j n(di, wj)p(zk|di, wj)
∑i ∑j n(di, wj)p(zk|di, wj)
簡明な実装例には [9] などがある
19 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-19-320.jpg)

![Latent Dirichlet Allocation(LDA)
Latent Dirichlet Allocation(LDA)
文書を語のベクトル 𝒘 として表したとき、文書の生成確率を次のようにモ
デル化 [2]
1 文書の語数 N が選ばれる
2 その文書におけるトピックの混合比 𝜽 ∼ Dirichlet(𝜶) が選ばれる
3 個々の語 wn について、
1 トピック zn ∼ Multinomial(𝜽) が選ばれる
2 zn と行列 𝜷(𝛽ij ∶= p(wj|zi)) から wn が生成される
p(𝒘|𝜶, 𝜷) =
∫ ∑
z
p(𝜽, z, 𝒘|𝜶, 𝜷)d𝜽 =
∫
p(𝜽|𝜶)
∏
w
∑
z
p(z|𝜽)p(w|z, 𝜷)d𝜽
21 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-21-320.jpg)



![Latent Dirichlet Allocation(LDA)
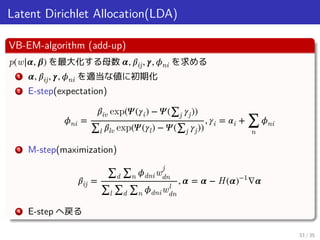
VB-EM-algorithm
log p(𝒘|𝜶, 𝜷) = log
∫ ∑
z
p(𝜽, z, 𝒘|𝜶, 𝜷)d𝜽
= log
∫ ∑
z
q(𝜽, z)
p(𝜽, z, 𝒘|𝜶, 𝜷)
q(𝜽, z)
d𝜽
≥
∫ ∑
z
q(𝜽, z) log
p(𝜽, z, 𝒘|𝜶, 𝜷)
q(𝜽, z)
d𝜽(∵Jensen の不等式)
=
∫ ∑
z
q(𝜽, z) log p(𝜽, z, 𝒘|𝜶, 𝜷)d𝜽 −
∫ ∑
z
q(𝜽, z) log q(𝜽, z
= Eq[log p(𝜽, z, 𝒘|𝜶, 𝜷)] − Eq[log q(𝜽, z)]
この下限を F(𝜸, 𝝓, 𝜶, 𝜷) とおき、最大化する
25 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-25-320.jpg)
![Latent Dirichlet Allocation(LDA)
VB-EM-algorithm
F(𝜸, 𝝓, 𝜶, 𝜷) = Eq[log p(𝜽, z, 𝒘|𝜶, 𝜷)] − Eq[log q(𝜽, z)]
= Eq[log(p(𝒘|𝜽, z, 𝜶, 𝜷)p(𝜽, z|𝜶, 𝜷))] − Eq[log(q(𝜽)q(z))]
(∵𝜽, z は条件付き独立)
= Eq[log(p(𝒘|z, 𝜷)p(z|𝜽, 𝜶, 𝜷)p(𝜽|𝜶, 𝜷))] − Eq[log(q(𝜽)q(z))]
(∵𝒘 と 𝜽, 𝜶 は条件付き独立)
= Eq[log(p(𝒘|z, 𝜷)p(z|𝜽)p(𝜽|𝜶))] − Eq[log(q(𝜽)q(z))]
(∵z と 𝜶, 𝜷、 𝜽 と 𝜷 は条件付き独立)
= Eq[log p(𝜽|𝜶)] + Eq[log p(z|𝜽)] + Eq[log p(𝒘|z, 𝜷)]
− Eq[log q(𝜽)] − Eq[log q(z)]
26 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-26-320.jpg)
![Latent Dirichlet Allocation(LDA)
VB-EM-algorithm
更に F を展開しa
、 𝛹(z) ∶= d
dz
log 𝛤(z)(= 𝛤′
(z)
𝛤(z)
) をディガンマ関数とし、
F(𝜸, 𝝓, 𝜶, 𝜷) = log 𝛤(∑
j
𝛼j) − ∑
i
log 𝛤(𝛼i) + ∑
i
(𝛼i − 1)(𝛹(𝛾i) − 𝛹(∑
j
𝛾j))
+ ∑
n
∑
i
𝜙ni(𝛹(𝛾i) − 𝛹(∑
j
𝛾j))
+ ∑
n
∑
i
∑
j
𝜙niw
j
n log 𝛽ij
− log 𝛤(∑
j
𝛾j) + ∑
i
log 𝛤(𝛾i) − ∑
i
(𝛾i − 1)(𝛹(𝛾i) − 𝛹(∑
j
𝛾j))
− ∑
n
∑
i
𝜙ni log 𝜙ni
(各行は前ページの式における各項に対応)
a
途中の導出は [10][11] が詳しい。 27 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-27-320.jpg)





![Latent Dirichlet Allocation(LDA)
Remark
求めた 𝜶, 𝜷 は次のような意味を持つ
𝛼i は、トピック i の現れ易さを表す
𝛽ij は、トピック i での語 j の現れ易さを表す
簡明な実装例には [8] などがある
学習していない文書に対しては、学習した 𝜶, 𝜷 を用いて 𝝓, 𝜸 を再計算
することで、文書の語のトピックを算出可能
34 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-34-320.jpg)
![Latent Dirichlet Allocation(LDA)
Gibbs sampling
実際にサンプリングを繰り返して最適な z を求める手法 [3]
VB-EM より更新式の導出が簡単で高性能だが、VB-EM より若干遅い
最初に、一般にどのトピックも平等に現れうる、つまり 𝜶 のすべての成
分は等しい (𝛼i = 1
K
) と仮定する
更新式の導出の詳細は [13] を参照
35 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-35-320.jpg)
![EM-algorithm
EM-algorithm
パラメータ 𝜽 と潜在変数 z をもつデータについて、観測されたデータ D が
現れる確率 L(𝜽) が最大になるよう最適化する手法 [12][1]
L(𝜽) ∶= p(D|𝜽) =
∫
p(D, z|𝜽)dz
尤度関数 L(𝜽) を最大化するため、対数尤度を考え、任意の分布 q(z|D) を導
入する
log L(𝜽) = log
∫
p(D, z|𝜽)dz = log
∫
q(z|D)
p(D, z|𝜽)
q(z|D)
dz
≥
∫
q(z|D) log
p(D, z|𝜽)
q(z|D)
dz(∵Jensen の不等式)
この下限を F(q, 𝜽) とおくと、log L(𝜽) は常に F より大きくなるので、F を
最大化して L を底上げすればよい
36 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-36-320.jpg)

![EM-algorithm
M-step
F を 𝜽 について最大化
F(q, 𝜽) =
∫
q(z|D) log
p(D, z|𝜽)
q(z|D)
dz
=
∫
q(z|D)(log p(D, z|𝜽) − log q(z|D))dz
=
∫
q(z|D) log p(D, z|𝜽)dz −
∫
q(z|D) log q(z|D)dz
= E[log p(D, z|𝜽)] − H(q(z|D))
第 2 項 (q のエントロピー) は 𝜽 に依らないので、E[log p] を 𝜽 について最
大化
38 / 35](https://image.slidesharecdn.com/slide-topicmodel-140408081031-phpapp02/85/Topic-model-38-320.jpg)






![[2021CAPE公開セミナー] 論理学上級 Ⅱ-1「ラッセルのパラドックスと3つの対策」](https://cdn.slidesharecdn.com/ss_thumbnails/22032521kyoto1russellparadoxslide00-220325073041-thumbnail.jpg?width=640&height=640&fit=bounds)












![[2021CAPE公開セミナー] 論理学上級 Ⅱ-3「証明論的意味論としてのマーティン・レーフの構成的型理論」](https://cdn.slidesharecdn.com/ss_thumbnails/22032421kyoto3ml-ittslide01-220325073813-thumbnail.jpg?width=640&height=640&fit=bounds)

![[2021CAPE公開セミナー] 論理学上級 Ⅱ-2「カリー・ハワード対応と『証明のデータ型としての命題』観」](https://cdn.slidesharecdn.com/ss_thumbnails/22032521kyoto2propositionsastypesslide00-220325073455-thumbnail.jpg?width=640&height=640&fit=bounds)


































































