Download as PDF, PPTX






![12
•
•
•
•
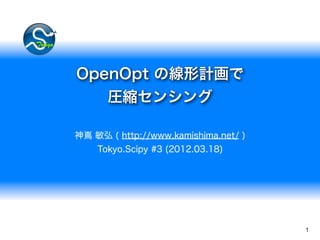
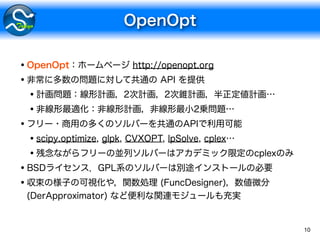
# objective to minimize: f x^T -> min
f = np.zeros((n_inputs * 2), dtype=np.float)
f[n_inputs:2 * n_inputs] = 1.0
P
i ti
ˆx = arg min
x
X
ti subject to t x t, y = Ax](https://image.slidesharecdn.com/tokyoscipy3-compressedsensing-120317062113-phpapp01/85/OpenOpt-12-320.jpg)
![13
•
•
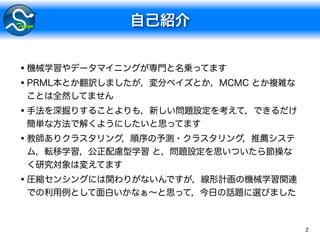
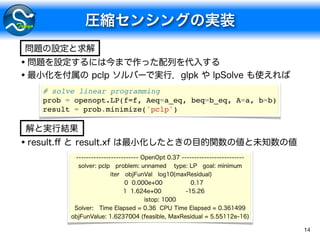
# constraint: a x^T == b
a_eq = np.zeros((n_outputs, 2 * n_inputs), dtype=np.float)
a_eq[:, 0:n_inputs] = trans
b_eq = x1
y = Ax
t x t
• xi ti 0, xi ti 0, for i = 0, . . . , M
# constraint: -t <= x <= t
a = np.zeros((2 * n_inputs, 2 * n_inputs), dtype=np.float)
for i in xrange(n_inputs):
a[i, i] = -1.0
a[i, n_inputs + i] = -1.0
a[n_inputs + i, i] = 1.0
a[n_inputs + i, n_inputs + i] = -1.0
b = np.zeros(n_inputs * 2)](https://image.slidesharecdn.com/tokyoscipy3-compressedsensing-120317062113-phpapp01/85/OpenOpt-13-320.jpg)




![19
※
※
•
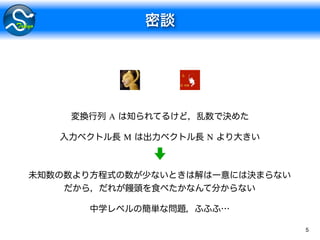
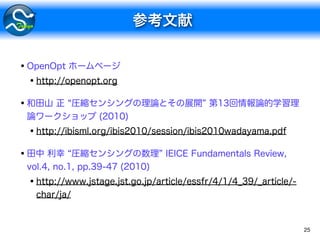
f = a * b + x / y
•
f = fd.sin(x)
g += c
g = fd.log(y)
•
f = fd.dot(a, b) g = fd.sum(x)
•
•
f = 0
for i in xrange(3):
f = f + a[i]](https://image.slidesharecdn.com/tokyoscipy3-compressedsensing-120317062113-phpapp01/85/OpenOpt-19-320.jpg)
![20
•
•
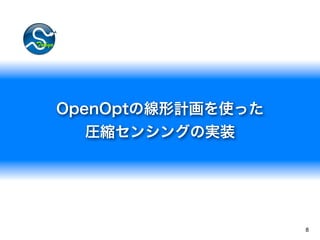
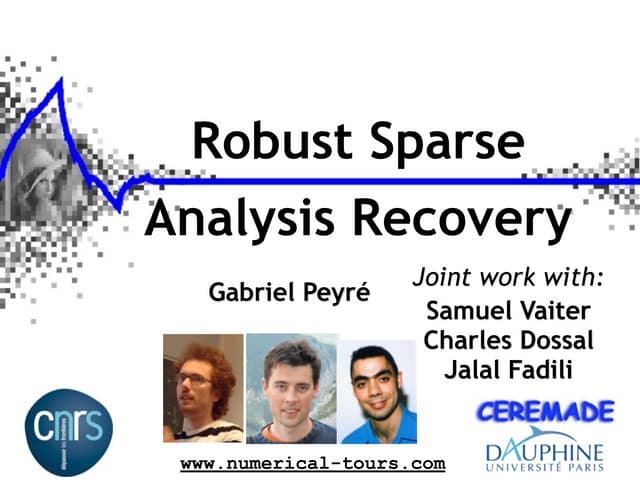
※ In [10]: a = fd.oovar()
In [12]: f = fd.sin(a)
In [13]: f(1)
AttributeError
In [20]: a, b = fd.oovars(2)
In [21]: f = a + b
In [22]: p = { a:1, b:10 }
In [23]: f(p)
Out[23]: array(11.0)
• In [30]: a, b = fd.oovars(2)
In [31]: f = a + b
In [32]: p = { a:1.0, b:np.array([10.,
20., 30.]) }
In [33]: f(p)
Out[33]: array([ 11., 21., 31.])](https://image.slidesharecdn.com/tokyoscipy3-compressedsensing-120317062113-phpapp01/85/OpenOpt-20-320.jpg)
![21
•
•
In [10]: x = fd.oovar()
In [11]: f = fd.sin(x)
In [12]: f({x:np.pi})
Out[12]: array(1.2246467991473532e-16) # 0
In [13]: f.D({x:np.pi})
Out[13]: {unnamed_oofun_11: -1.0} # sin'(π) = cos(π) = -1.0
•
In [20]: x = fd.oovar()
In [21]: f = 2 * x ** 2
In [22]: p = {x:np.array([1., 2., 3.])}
In [23]: f(p)
Out[23]: array([ 2., 8., 18.])
In [24]: f.D(p)
Out[24]:
{unnamed_oofun_13: array([[ 4., 0., 0.],
[ 0., 8., 0.],
[ 0., 0., 12.]])}](https://image.slidesharecdn.com/tokyoscipy3-compressedsensing-120317062113-phpapp01/85/OpenOpt-21-320.jpg)
![22
•
# define variable
t = fd.oovar('t', size=n_inputs)
x = fd.oovar('x', size=n_inputs)
# objective to minimize: f x^T -> min
objective = fd.sum(t)
•
•
•
# init constraints
constraints = []
•
# equality constraint: a_eq x^T = b_eq
constraints.append(fd.dot(trans, x) == x1)](https://image.slidesharecdn.com/tokyoscipy3-compressedsensing-120317062113-phpapp01/85/OpenOpt-22-320.jpg)
![23
•
# inequality constraint: -t < x < t
constraints.append(-t <= x)
constraints.append(x <= t)
•
# start_point
start_point = {x:np.zeros(n_inputs), t:np.zeros(n_inputs)}
•
# solve linear programming
prob = LP(objective, start_point, constraints=constraints)
result = prob.minimize('pclp')
•
hat_x = result.xf[x]](https://image.slidesharecdn.com/tokyoscipy3-compressedsensing-120317062113-phpapp01/85/OpenOpt-23-320.jpg)


The document discusses optimization problems involving linear programming and the use of functions in Python, specifically utilizing libraries such as OpenOpt and FuncDesigner. It outlines objective functions, constraints, and methods to minimize these functions based on various conditions. The document also includes code snippets that demonstrate the implementation of these optimization techniques.

















![[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing](https://cdn.slidesharecdn.com/ss_thumbnails/glide2-220107030326-thumbnail.jpg?width=640&height=640&fit=bounds)








































































![[DSC Europe 25] Srba Markovic - From Pilot to Production: Overcoming AI Deplo...](https://cdn.slidesharecdn.com/ss_thumbnails/yjjmrtytmwbalxlba7px-4-srba-markovic-from-pilot-to-production-overcoming-ai-deployment-blockers-with-260114111931-4a892d44-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Dragan Jerosimovic - The Anatomy of a Narrative Simulation.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/vzputuprdqr6zwbrwdcw-1-dragan-jerosimovic-the-anatomy-of-a-narrative-simulation-260114111931-9d04fba2-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Slobodan Dolinic - Smart and Intelligent Green Region.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/0bribinjsp6ghwtvsvor-2-sigre-slobodan-dolinic-260115093812-c9c10e90-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DSC Europe 25] Nikola Vasiljevic - Player segmentation by combat playstyles ...](https://cdn.slidesharecdn.com/ss_thumbnails/mnvbf0yvrwaqsipzrrv3-2-nikola-vasiljevic-player-segmentation-by-playstyles-in-action-shooter-games-260114111931-b4d766cd-thumbnail.jpg?width=640&height=640&fit=bounds)



