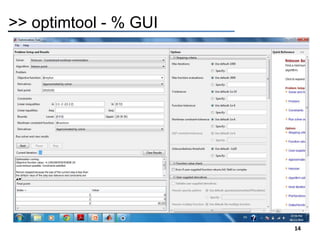
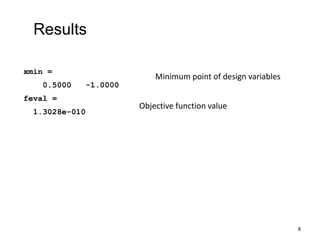
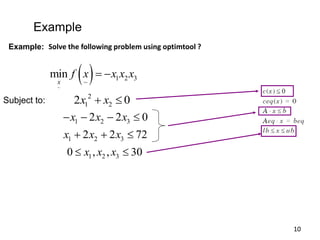
This document discusses optimization techniques in MATLAB. It describes how to perform both unconstrained and constrained optimization. For unconstrained problems, the fminunc function is used to find the minimum of an objective function. For constrained problems, fmincon is used to minimize an objective function subject to inequality, equality, and bound constraints. The document provides an example of using these functions to solve a sample constrained optimization problem.

![Unconstrained Minimization
Consider the problem of finding a set of values [x1 x2]T that
solves
1
~
2 2
1 2 1 2 2
~
min 4 2 4 2 1
x
x
f x e x x x x x
Steps:
• Create an M-file that returns the function value (Objective
Function). Call it objfun.m
• Then, invoke the unconstrained minimization routine. Use fminunc
6
Example:
Solution:
Solve the following problem using optimtool ?](https://image.slidesharecdn.com/3-240316054350-89d2d620/85/optimization-methods-by-using-matlab-pptx-6-320.jpg)
![Step 1 – Obj. Function
function f = objfun(x)
f=exp(x(1))*(4*x(1)^2+2*x(2)^2+4*x(1)*x(2)+2*x(2)+1);
7
Step 2 – Invoke Routine
x0 = [-1,1];
[xmin,feval]=fminunc(‘objfun’,x0);](https://image.slidesharecdn.com/3-240316054350-89d2d620/85/optimization-methods-by-using-matlab-pptx-7-320.jpg)
![[xmin,feval,exitflag,output,lambda,grad,hessian] =
fmincon(fun,x0,A,B,Aeq,Beq,LB,UB,NONLCON,options,P1,P2,…)
Constrained Minimization
9](https://image.slidesharecdn.com/3-240316054350-89d2d620/85/optimization-methods-by-using-matlab-pptx-9-320.jpg)
![2
1 2
2 0
x x
For
Create a function call nonlcon which returns 2 constraint vectors [C,Ceq]
function [C,Ceq]=nonlcon(x)
C=2*x(1)^2+x(2);
Ceq=[];
Remember to return a null
Matrix if the constraint does
not apply
Solution:
11
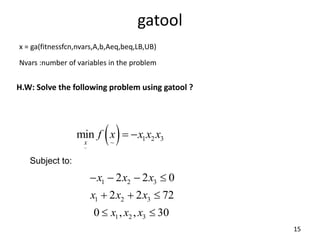
function f = myfun(x)
f=-x(1)*x(2)*x(3);](https://image.slidesharecdn.com/3-240316054350-89d2d620/85/optimization-methods-by-using-matlab-pptx-11-320.jpg)
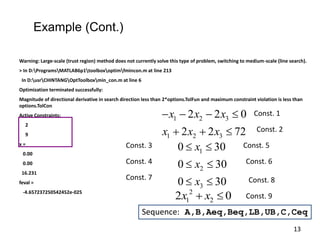
![x0=[10;10;10];
A=[-1 -2 -2;1 2 2];
B=[0 72]';
LB = [0 0 0]';
UB = [30 30 30]';
[x,feval]=fmincon(@myfun,x0,A,B,[],[],LB,UB,@nonl
con)
1 2 2 0
,
1 2 2 72
A B
CAREFUL!!!
fmincon(fun,x0,A,B,Aeq,Beq,LB,UB,NONLCON,options,P1,P2
,…)
0 30
0 , 30
0 30
LB UB
Example (Cont.)
12](https://image.slidesharecdn.com/3-240316054350-89d2d620/85/optimization-methods-by-using-matlab-pptx-12-320.jpg)