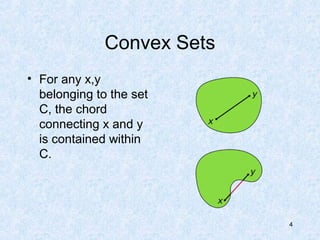
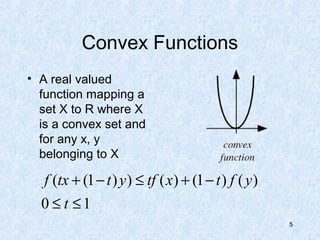
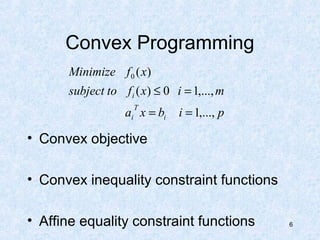
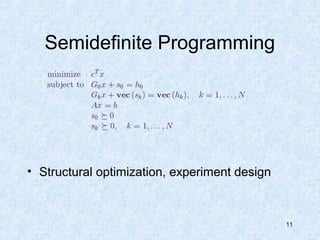
The document discusses CVXOPT, a Python-based suite for convex optimization that offers various solvers for different types of programming problems, including linear, quadratic, and semidefinite programming. It explains the key concepts of convex sets and functions, outlines the structure of solvers like conelp and coneqp, and provides examples of applications in areas such as finance and structural optimization. The presentation ultimately highlights the software's capabilities and potential customization options for improved performance.















![>> from cvxopt import matrix, solvers
>> A = matrix([ [ .3, -.4, -.2, -.4, 1.3 ], [ .6, 1.2, -1.7, .3, -.3 ], /
-.3, .0, .6, -1.2, -2.0 ] ])
>> b = matrix([ 1.5, .0, -1.2, -.7, .0])
>> m, n = A.size
>>> I = matrix(0.0, (n,n))
>> I[::n+1] = 1.0
>> G = matrix([-I, matrix(0.0, (1,n)), I])
>> h = matrix(n*[0.0] + [1.0] + n*[0.0])
>> dims = {'l': n, 'q': [n+1], 's': []}
>> x = solvers.coneqp(A.T*A, -A.T*b, G, h, dims)['x']
>> print(x)
7.26e-01]
6.18e-01]
3.03e-01]
22](https://image.slidesharecdn.com/iesempres-140129190926-phpapp02/85/Convex-Optimization-Modelling-with-CVXOPT-22-320.jpg)


![dims = {'l': 2, 'q': [4, 4], 's': [3]}
25](https://image.slidesharecdn.com/iesempres-140129190926-phpapp02/85/Convex-Optimization-Modelling-with-CVXOPT-25-320.jpg)

![solvers.cpl
KKT System
H
A
~
G
T
A
0
0
m
G u x bx
0 u y = by ,
− W T W u z bz
~
T
~
H = ∑ z k ∇ f k ( x), G = [∇f1 ( x) ... ∇f m ( x) G T ]T
2
k =0
27](https://image.slidesharecdn.com/iesempres-140129190926-phpapp02/85/Convex-Optimization-Modelling-with-CVXOPT-27-320.jpg)

![solvers.cp
Robust Least Squares
from cvxopt import solvers, matrix, spdiag, sqrt, div
def robls(A, b, rho) :
m, n = A.size
def F(x = None, z = None) :
if x is None : return 0, matrix(0.0, (n,1))
y = A*x -b
w = sqrt(rho + y * *2)
f = sum(w)
Df = div(y, w).T * A
if z is None : return f, Df
H = A.T * spdiag(z[0] * rho * (w * * - 3)) * A
return f, Df, H
Minimize
m
∑ φ((Ax-b) )
k =1
k
where φ (u ) = ρ + u 2
return solvers.cp(F)[' x' ]
29](https://image.slidesharecdn.com/iesempres-140129190926-phpapp02/85/Convex-Optimization-Modelling-with-CVXOPT-29-320.jpg)


























![[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models](https://cdn.slidesharecdn.com/ss_thumbnails/mainslideshare1-190927025239-thumbnail.jpg?width=640&height=640&fit=bounds)









![[DL輪読会]Learning Latent Dynamics for Planning from Pixels](https://cdn.slidesharecdn.com/ss_thumbnails/taniguchi20181221-190104064850-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL Hacks]BERT: Pre-training of Deep Bidirectional Transformers for Language ...](https://cdn.slidesharecdn.com/ss_thumbnails/20181129suzukibert1-181204064830-thumbnail.jpg?width=640&height=640&fit=bounds)