Downloaded 777 times





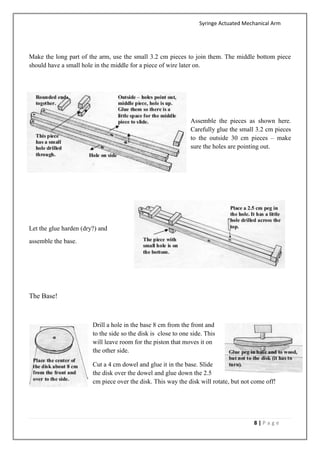

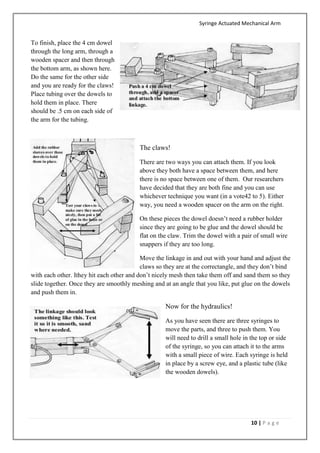
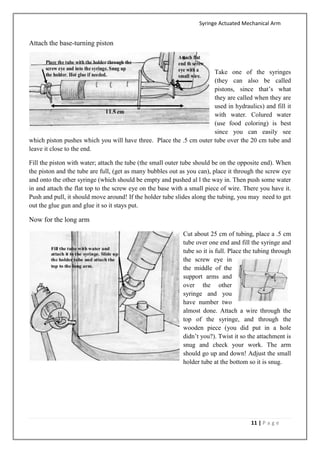
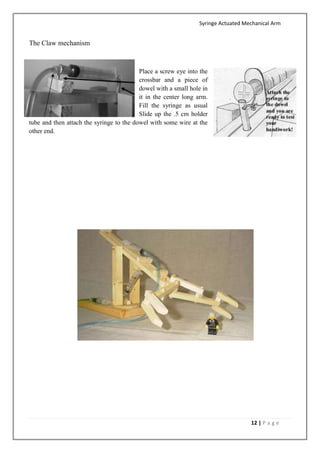



This document describes the design and development of a syringe-actuated mechanical arm. It consists of various wooden and metal parts connected to allow movement via hydraulic actuation from syringes. The arm uses a rack and pinion mechanism to provide rotational movement and a slotted mechanism to increase its range of motion and efficiency in picking up and placing items. Detailed instructions are provided on cutting and assembling each part, including the base, support structures, long arm, grabber arms, and syringes. The overall design allows the arm to move in multiple degrees of freedom to manipulate objects using fluid pressure from the syringes.
































































































