Downloaded 17 times

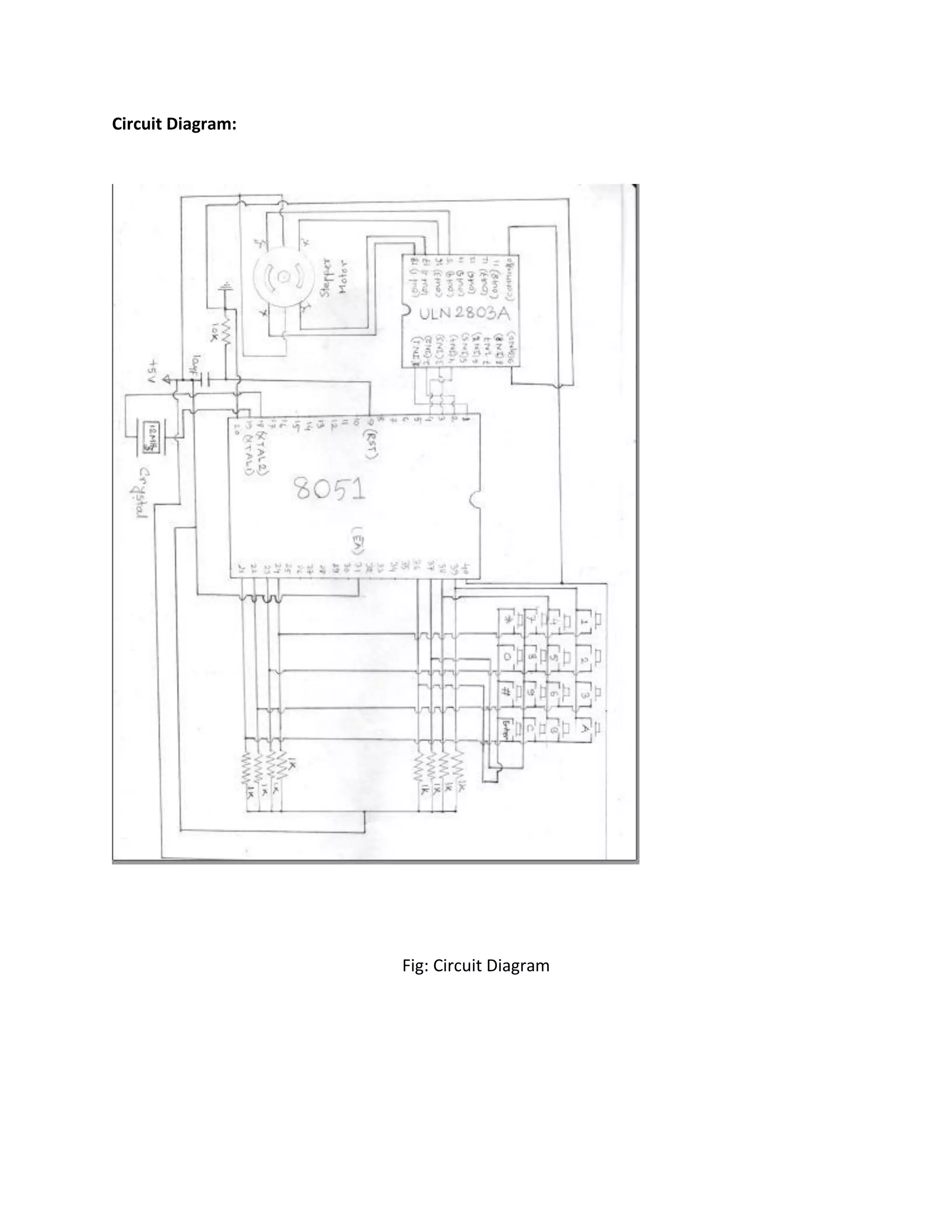
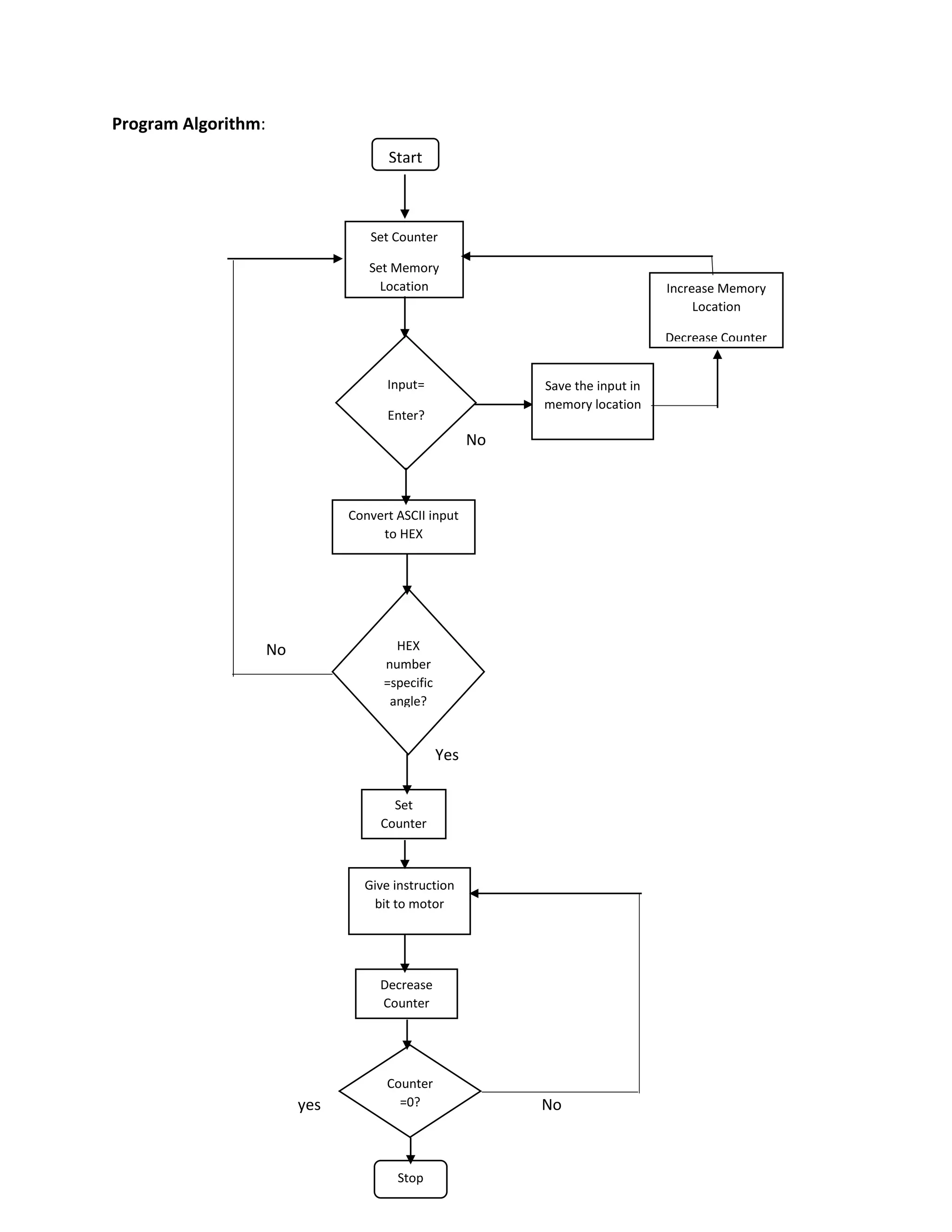
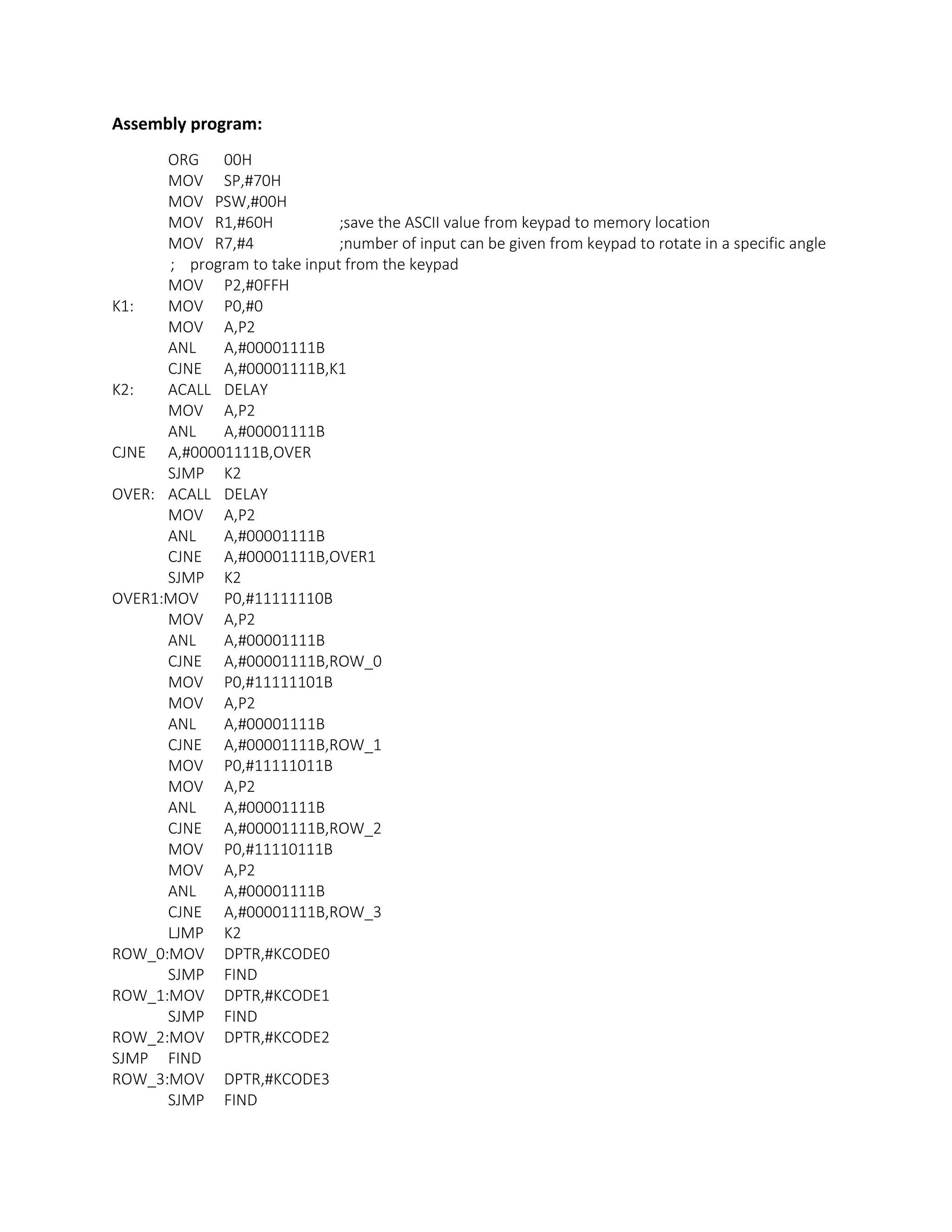
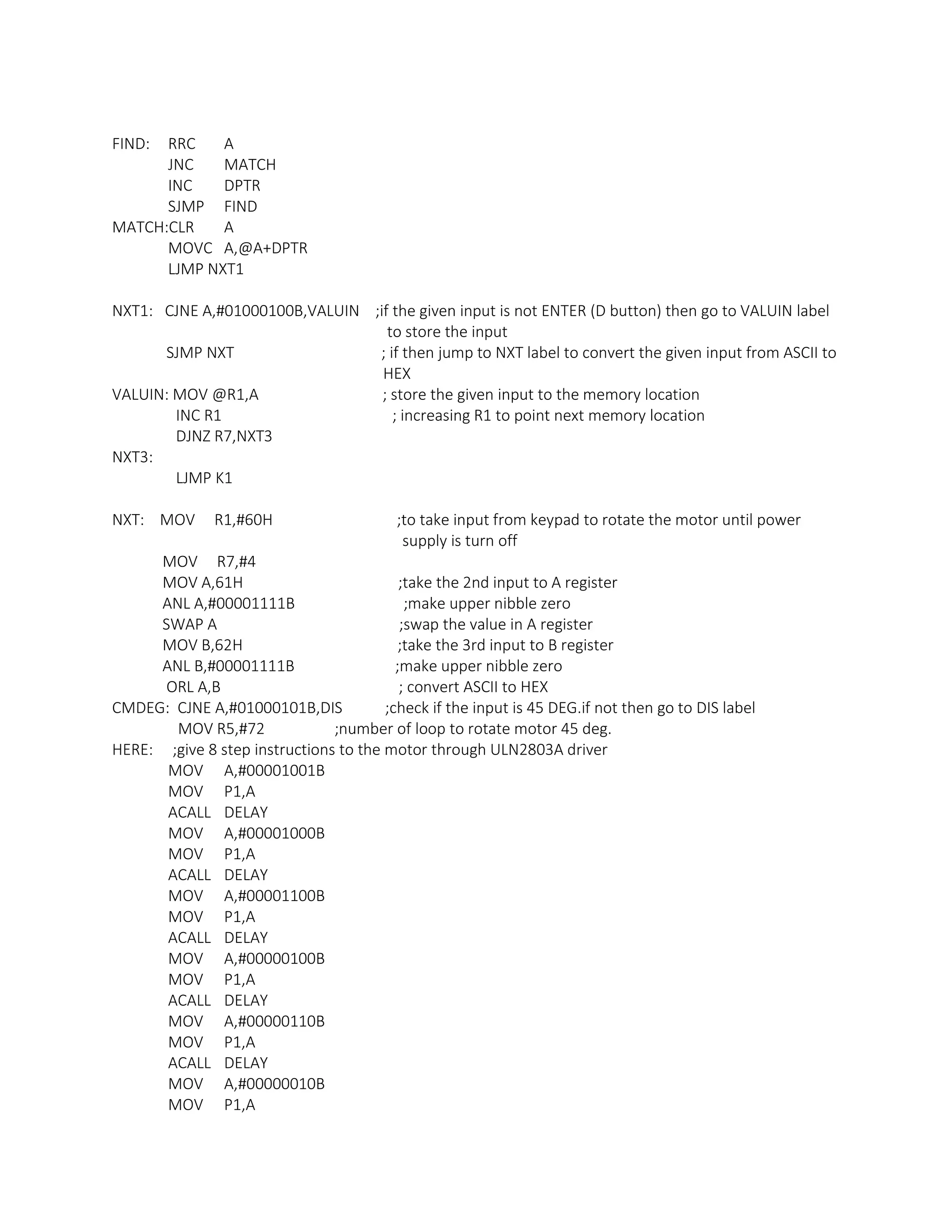



The document describes a project to control the rotation of a stepper motor to specific angles through a keypad input. The objective is to rotate the stepper motor 45, 90, 135, 180, 225, 270, and 315 degrees based on the input provided via the keypad. An AT89S52 microcontroller is used to read the keypad input and provide the appropriate signals to a ULN2803A driver, which drives the stepper motor coils to rotate it to the desired angle. The circuit diagram and assembly program code to implement the angle control are also included.
























































