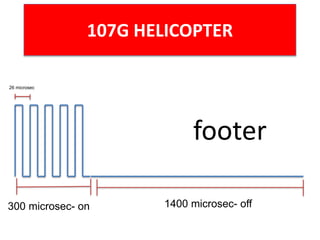
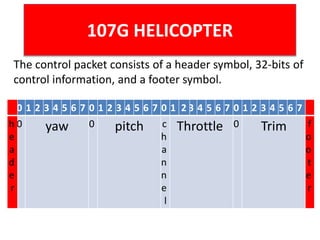
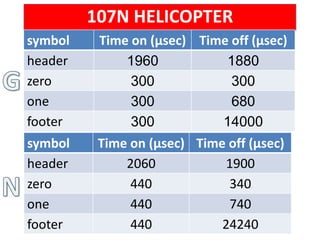
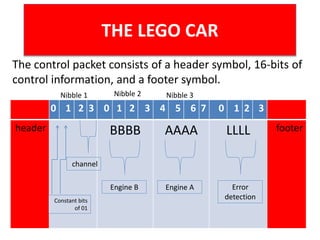
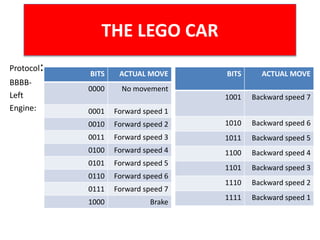
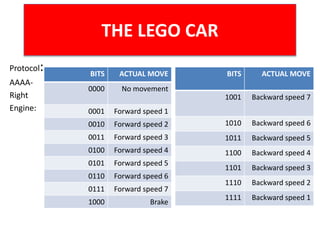
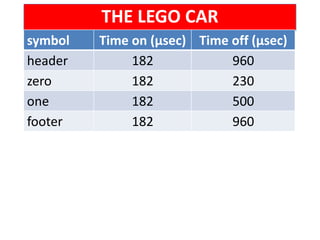
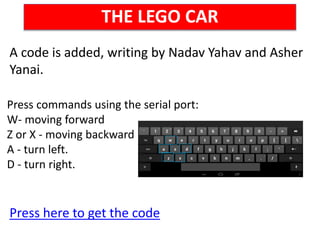
This document discusses reverse engineering infrared remote controls through analyzing the timing of infrared signals. It provides examples of decoding protocols for a Syma 107G helicopter, Syma 107N helicopter, and Lego car remote control. The protocols are broken down into header, data bits for controls like yaw, pitch and throttle, and footer bits. Decoding the signals allows generating code to replicate the controls with an Arduino and infrared LED.