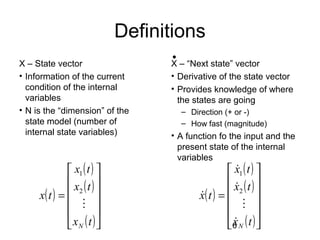
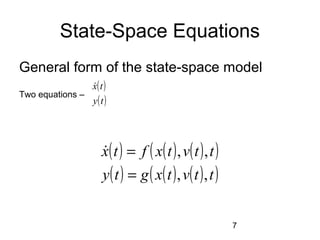
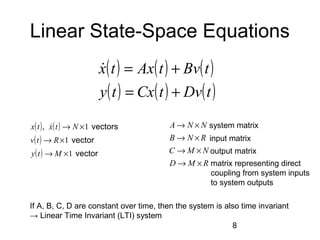
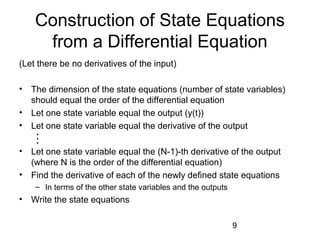
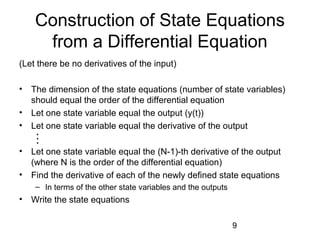
State-space modeling represents systems using matrices and vectors instead of differential/difference equations or transfer functions. It models both the internal state variables and behavior of a system over time. The state-space model defines state, input, output, and next state vectors related by state equations that can be derived from differential equations describing the system. State-space modeling is useful for complex systems as it can handle multiple inputs/outputs and provides insight into the internal workings.