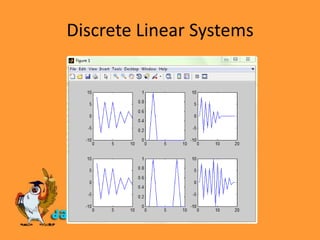
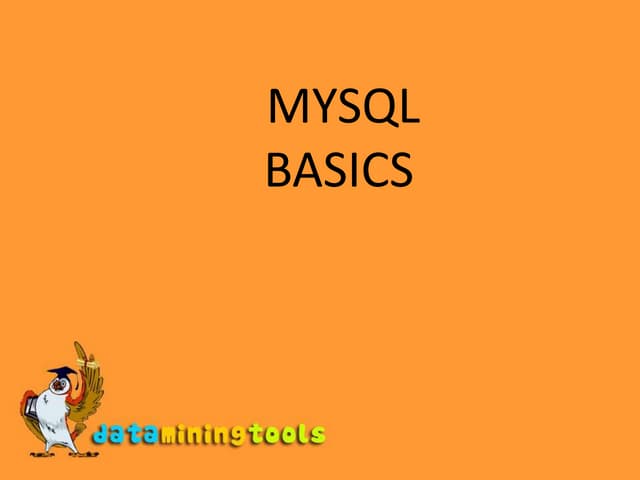
![Discrete Linear Systems>> A=[8 -7 6 -5 6 -5 2 -3 2 -1];x=[0 1 0 0 0 0 0 0 0 0 ];B=conv(A,x);subplot(2,3,1); plot(A);subplot(2,3,2); plot(x);subplot(2,3,3); plot(B);x=[0 1 0 0 0 0 0 1 0 0 ];B=conv(A,x);subplot(2,3,4); plot(A);subplot(2,3,5); plot(x);subplot(2,3,6); plot(B);](https://image.slidesharecdn.com/discretelinearsystems-100108085240-phpapp01/85/Matlab-Discrete-Linear-Systems-3-320.jpg)
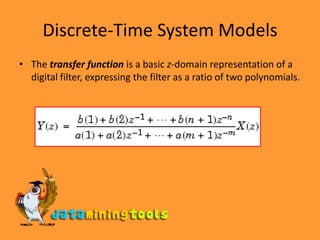
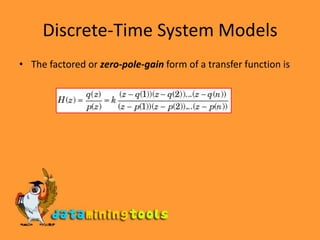
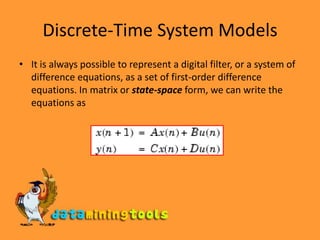
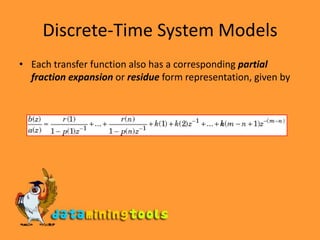
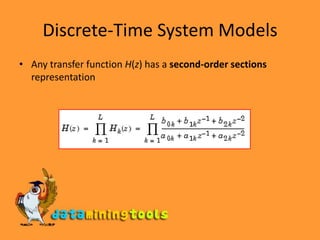
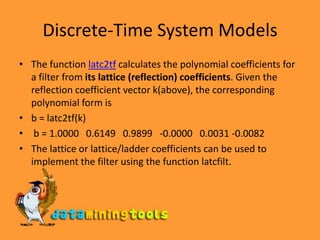
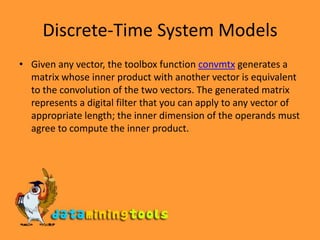


Discrete linear systems are digital implementations of linear time-invariant systems. They can be represented using various models including transfer functions, state-space models, and convolution matrices. Common transfer function representations include zero-pole-gain form and partial fraction expansion. Filters can also be modeled using second-order sections or lattice/ladder structures.












































![Digital Signal Processing[ECEG-3171]-Ch1_L03](https://cdn.slidesharecdn.com/ss_thumbnails/dspl3-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)