The document presents a state variable model design for the Learjet 24, focusing on both longitudinal and lateral dynamics. It outlines the derivation of these models, including the necessary equations, numerical solutions, and sensitivity analyses to determine aircraft performance under varying aerodynamic coefficients. Additionally, it includes simulation results and appendices with MATLAB code and spreadsheets related to the model.




![6
Where:
𝐴 𝑛×𝑛
̿̿̿̿̿̿̿ = 𝑆𝑡𝑎𝑡𝑒 𝑀𝑎𝑡𝑟𝑖𝑥
𝐵 𝑛×𝑚
̿̿̿̿̿̿̿ = 𝐶𝑜𝑛𝑡𝑟𝑜𝑙 𝑀𝑎𝑡𝑟𝑖𝑥
𝐶𝑙×𝑛
̿̿̿̿̿̿ = 𝑂𝑏𝑠𝑒𝑟𝑣𝑎𝑡𝑖𝑜𝑛 𝑀𝑎𝑡𝑟𝑖𝑥
𝐷𝑙×𝑚
̿̿̿̿̿̿̿ = 𝑆𝑡𝑎𝑡𝑒 𝑀𝑎𝑡𝑟𝑖𝑥
Once the state variable matrices are understood, the system equations can be rewritten as
following.
[ 𝑥̇̅] 𝑛×1 = 𝐴 𝑛×𝑛
̿̿̿̿̿̿̿[ 𝑥̅] 𝑛×1 + 𝐵 𝑛×𝑚
̿̿̿̿̿̿̿[ 𝑢̅] 𝑚×1
[ 𝑦̅]𝑙×1 = 𝐶𝑙×𝑛
̿̿̿̿̿̿[ 𝑥̅] 𝑛×1 + 𝐷𝑙×𝑚
̿̿̿̿̿̿̿[ 𝑢̅] 𝑚×1
Now that the general state variable model is understood, it is applied to aircraft dynamics.
The model described above is applied to both the longitudinal and lateral directions of the
aircraft.
2.2 Longitudinal State Variable Model
To begin the state variable model of the longitudinal dynamics, the equations of motion
for the aircraft are necessary. These equations are made of dimensional derivatives and are
shown below.
𝑢̇ = (𝑋 𝑢 + 𝑋 𝑇𝑢
)𝑢 + 𝑋 𝛼 𝛼 − 𝑔 cos( 𝛩1) 𝜃 + 𝑋 𝛿 𝐸
𝛿 𝐸
𝑉𝑃1
𝛼̇ = 𝑍 𝑢 𝑢 + 𝑍 𝛼 𝛼 + 𝑍 𝛼̇ 𝛼̇ − 𝑔 sin( 𝛩1) 𝜃 + (𝑍 𝑞 + 𝑉𝑃1
)𝜃̇ + 𝑍 𝛿 𝐸
𝛿 𝐸
𝜃̈ = (𝑀 𝑢 + 𝑀 𝑇𝑢
)𝑢 + (𝑀 𝛼 + 𝑀 𝑇𝛼
)𝛼 + 𝑀 𝛼̇ 𝛼̇ + 𝑀 𝑞 𝜃̇ + 𝑀𝛿 𝐸
𝛿 𝐸
These sets of equations must be adjusted using the relationship shown next.
𝑞 = 𝜃̇
𝑞̇ = 𝜃̈
This yields the following system of equations.
𝑢̇ = (𝑋 𝑢 + 𝑋 𝑇𝑢
)𝑢 + 𝑋 𝛼 𝛼 − 𝑔 cos( 𝛩1) 𝜃 + 𝑋 𝛿 𝐸
𝛿 𝐸
(𝑉𝑃1
− 𝑍 𝛼̇ )𝛼̇ = 𝑍 𝑢 𝑢 + 𝑍 𝛼 𝛼 − 𝑔 sin( 𝛩1) 𝜃 + (𝑍 𝑞 + 𝑉𝑃1
)𝑞 + 𝑍 𝛿 𝐸
𝛿 𝐸
𝑞̇ = (𝑀 𝑢 + 𝑀 𝑇𝑢
)𝑢 + (𝑀 𝛼 + 𝑀 𝑇𝛼
)𝛼 + 𝑀 𝛼̇ 𝛼̇ + 𝑀 𝑞 𝑞 + 𝑀 𝛿 𝐸
𝛿 𝐸](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-6-2048.jpg)
![7
𝜃̇ = 𝑞
From these equations it is evident that the second equation is nested with in the third
equations of the system. Substituting and rearranging the equations yields the final system
equations for the longitudinal direction. These equations are expressed below.
𝑢̇ = (𝑋 𝑢 + 𝑋 𝑇𝑢
)𝑢 + 𝑋 𝛼 𝛼 − 𝑔 cos( 𝛩1) 𝜃 + 𝑋𝛿 𝐸
𝛿 𝐸
𝛼̇ =
𝑍 𝑢
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝑢 +
𝑍 𝛼
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝛼 −
𝑔 sin( 𝛩1)
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝜃 +
(𝑍 𝑞 + 𝑉𝑃1
)
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝑞 +
𝑍 𝛿 𝐸
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝛿 𝐸
𝑞 = [𝑀 𝛼̇ (
𝑍 𝑢
(𝑉𝑃1
− 𝑍 𝛼̇ )
) + 𝑀 𝑢] 𝑢 + [𝑀 𝛼̇ (
𝑍 𝛼
(𝑉𝑃1
− 𝑍 𝛼̇ )
) + 𝑀 𝛼] 𝛼 + [𝑀 𝛼̇ (−
𝑔 sin( 𝛩1)
(𝑉𝑃1
− 𝑍 𝛼̇ )
)] 𝜃
+ [𝑀 𝛼̇ (
(𝑍 𝑞 + 𝑉𝑃1
)
(𝑉𝑃1
− 𝑍 𝛼̇ )
) + 𝑀 𝑞 ] 𝑞 + [𝑀 𝛼̇ (
𝑍 𝛿 𝐸
(𝑉𝑃1
− 𝑍 𝛼̇ )
) + 𝑀 𝛿 𝐸
] 𝛿 𝐸
𝜃̇ = 𝑞
From these equations, the primed derivatives for the aircraft are generated. They are
introduced to the above equations as shown.
𝑢̇ = 𝑋 𝑢
′
𝑢 + 𝑋 𝛼
′
𝛼 + 𝑋 𝜃
′
𝜃 + 𝑋 𝛿 𝐸
′
𝛿 𝐸
𝛼̇ = 𝑍 𝑢
′
𝑢 + 𝑍 𝛼
′
𝛼 + 𝑍 𝜃
′
𝜃 + 𝑍 𝑞
′
𝑞 + 𝑍 𝛿 𝐸
′
𝛿 𝐸
𝑞 = 𝑀 𝑢
′
𝑢 + 𝑀 𝛼
′
𝛼 + 𝑀 𝜃
′
𝜃 + 𝑀 𝑞
′
𝑞 + 𝑀 𝛿 𝐸
′
𝛿 𝐸
𝜃̇ = 𝑞
Where:
𝑋 𝑢
′
= (𝑋 𝑢 + 𝑋 𝑇𝑢
) 𝑍 𝑢
′
=
𝑍 𝑢
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝑀 𝑢
′
= 𝑀 𝛼̇ (
𝑍 𝑢
(𝑉𝑃1
− 𝑍 𝛼̇ )
) + 𝑀 𝑢
𝑋 𝛼
′
= 𝑋 𝛼
𝑍 𝛼
′
=
𝑍 𝛼
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝑀 𝛼
′
= 𝑀 𝛼̇ (
𝑍 𝛼
(𝑉𝑃1
− 𝑍 𝛼̇ )
) + 𝑀 𝛼
𝑋 𝜃
′
= −𝑔cos( 𝛩1) 𝑍 𝜃
′
= −
𝑔 sin( 𝛩1)
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝑀 𝜃
′
= 𝑀 𝛼̇ (−
𝑔 sin( 𝛩1)
(𝑉𝑃1
− 𝑍 𝛼̇ )
)
𝑋 𝑞
′
= 0 𝑍 𝑞
′
=
(𝑍 𝑞 + 𝑉𝑃1
)
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝑀 𝑞
′
= 𝑀 𝛼̇ (
(𝑍 𝑞 + 𝑉𝑃1
)
(𝑉𝑃1
− 𝑍 𝛼̇ )
) + 𝑀 𝑞
𝑋𝛿 𝐸
′
= 𝑋𝛿 𝐸
𝑍 𝛿 𝐸
′
=
𝑍 𝛿 𝐸
(𝑉𝑃1
− 𝑍 𝛼̇ )
𝑀 𝛿 𝐸
′
= 𝑀 𝛼̇ (
𝑍 𝛿 𝐸
(𝑉𝑃1
− 𝑍 𝛼̇ )
)
+ 𝑀𝛿 𝐸](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-7-2048.jpg)
![8
These variables represent the primed derivatives for the longitudinal dynamics. Now that
the equations of motion for the aircraft are found, the state variable model is applied. From these
equation it is evident there will be four states for the system. These states are shown in the
following formula.
𝑥 𝐿𝑜𝑛𝑔 = {
𝑢
𝛼
𝑞
𝜃
}
Along with the states, the inputs are represented by the following expression.
𝑢 𝐿𝑜𝑛𝑔 = { 𝛿 𝐸}
Once all of these expressions are understood, they are put into the state equation of the
state variable model. This is described below.
{
𝑢̇
𝛼̇
𝑞̇
𝜃̇
} = 𝐴 𝐿𝑜𝑛𝑔
̿̿̿̿̿̿̿ {
𝑢
𝛼
𝑞
𝜃
} + 𝐵 𝐿𝑜𝑛𝑔
̿̿̿̿̿̿̿{ 𝛿 𝐸}
Where:
{
𝑢̇
𝛼̇
𝑞̇
𝜃̇
} =
[
𝑋 𝑢
′
𝑋 𝛼
′
𝑋 𝑞
′
𝑋 𝜃
′
𝑍 𝑢
′
𝑍 𝛼
′
𝑍 𝑞
′
𝑍 𝜃
′
𝑀 𝑢
′
𝑀 𝛼
′
𝑀 𝑞
′
𝑀 𝜃
′
0 0 1 0 ]
{
𝑢
𝛼
𝑞
𝜃
} +
[
𝑋𝛿 𝐸
′
𝑍 𝛿 𝐸
′
𝑀 𝛿 𝐸
′
0 ]
{ 𝛿 𝐸}
The above equation is known as the state equation for the aircrafts longitudinal dynamics.
To complete the state variable model, the output equation is necessary. This is shown in the
following formula.
{
𝑢
𝛼
𝑞
𝜃
} = 𝐶 𝐿𝑜𝑛𝑔
̿̿̿̿̿̿̿ {
𝑢
𝛼
𝑞
𝜃
} + 𝐷 𝐿𝑜𝑛𝑔
̿̿̿̿̿̿̿{ 𝛿 𝐸}
Where:
{
𝑢
𝛼
𝑞
𝜃
} = [
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
] {
𝑢
𝛼
𝑞
𝜃
} + [
0
0
0
0
]{ 𝛿 𝐸}](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-8-2048.jpg)
![9
It should be noted that in this form the output of the system is equal to the state of the
system. The means the system could be controlled by a state variable feedback system. It is
possible to add an output to this equation.
2.3 Lateral State Variable Model
To begin the derivation of the lateral state variable model, the lateral directional
dynamics of the aircraft are necessary. These equations are made up of the lateral dimensional
derivatives and are expressed as follows.
(𝑉𝑃1
𝛽̇) = 𝑌𝛽 𝛽 + 𝑌𝑝 𝑝 + (𝑌𝑟 − 𝑉𝑃1
)𝑟 + 𝑔 cos( 𝛩1) 𝜙 + 𝑌𝛿 𝐴
𝛿 𝐴 + 𝑌𝛿 𝑅
𝛿 𝑅
𝑝̇ −
𝐼 𝑋𝑍
𝐼 𝑋𝑋
𝑟̇ = 𝐿 𝛽 𝛽+ 𝐿 𝑝 𝑝 + 𝐿 𝑟 𝑟 + 𝐿 𝛿 𝐴
𝛿 𝐴 + 𝐿 𝛿 𝑅
𝛿 𝑅
𝑟̇ −
𝐼 𝑋𝑍
𝐼𝑍𝑍
𝑝̇ = 𝑁𝛽 𝛽 + 𝑁 𝑝 𝑝 + 𝑁𝑟 𝑟 + 𝑁𝛿 𝐴
𝛿 𝐴 + 𝑁𝛿 𝑅
𝛿 𝑅
To simplify the moments of inertia for the aircraft, the following relationships are used.
𝐼1 =
𝐼 𝑋𝑍
𝐼 𝑋𝑋
𝐼2 =
𝐼 𝑋𝑍
𝐼𝑍𝑍
After this is done, it is evident that the second and third equations of motion are coupled.
With this in mind the second equation is rewritten. This is done in the formula below.
𝑝̇ = 𝐿 𝛽 𝛽+ 𝐿 𝑝 𝑝 + 𝐿 𝑟 𝑟 + 𝐿 𝛿 𝐴
𝛿 𝐴 + 𝐿 𝛿 𝑅
𝛿 𝑅 + 𝐼1 𝑟̇
This equation is then substituted into the third equation as shown as follows.
𝑟̇ − 𝐼2 [𝐿 𝛽 𝛽 + 𝐿 𝑝 𝑝 + 𝐿 𝑟 𝑟 + 𝐿 𝛿 𝐴
𝛿 𝐴 + 𝐿 𝛿 𝑅
𝛿 𝑅 + 𝐼1 𝑟̇] = 𝑁𝛽 𝛽 + 𝑁 𝑝 𝑝 + 𝑁𝑟 𝑟 + 𝑁 𝛿 𝐴
𝛿 𝐴 + 𝑁𝛿 𝑅
𝛿 𝑅
Solving for the state of the aircraft yields the expression below.
𝑟̇ =
(𝐼2 𝐿 𝛽 + 𝑁𝛽)
(1 − 𝐼1 𝐼2)
𝛽 +
(𝐼2 𝐿 𝑝 + 𝑁 𝑝)
(1 − 𝐼1 𝐼2)
𝑝 +
( 𝐼2 𝐿 𝑟 + 𝑁𝑟)
(1 − 𝐼1 𝐼2)
𝑟 +
(𝐼2 𝐿 𝛿 𝐴
+ 𝑁 𝛿 𝐴
)
(1 − 𝐼1 𝐼2)
𝛿 𝐴 +
(𝐼2 𝐿 𝛿 𝑅
+ 𝑁𝛿 𝑅
)
(1 − 𝐼1 𝐼2)
𝛿 𝑅
After this expression for the third equation of motion is found, it is substituted into the
second equation. This will change the second equation as follows.
𝑝̇ = (𝐿 𝛽 + 𝐼1
(𝐼2 𝐿 𝛽 + 𝑁𝛽)
(1 − 𝐼1 𝐼2)
) 𝛽 + (𝐿 𝑝 + 𝐼1
(𝐼2 𝐿 𝑝 + 𝑁 𝑝)
(1 − 𝐼1 𝐼2)
) 𝑝 + (𝐿 𝑟 + 𝐼1
( 𝐼2 𝐿 𝑟 + 𝑁𝑟)
(1 − 𝐼1 𝐼2)
) 𝑟
+ (𝐿 𝛿 𝐴
+ 𝐼1
(𝐼2 𝐿 𝛿 𝐴
+ 𝑁 𝛿 𝐴
)
(1 − 𝐼1 𝐼2)
) 𝛿 𝐴 + (𝐿 𝛿 𝑅
+ 𝐼1
(𝐼2 𝐿 𝛿 𝑅
+ 𝑁𝛿 𝑅
)
(1 − 𝐼1 𝐼2)
) 𝛿 𝑅
Which simplifies to:](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-9-2048.jpg)

![11
These variables represent the primed derivatives for the longitudinal dynamics. Now that
the equations of motion for the aircraft are found, the state variable model is applied. From these
equation it is evident there will be four states for the system. These states are shown in the
following formula.
𝑥 𝐿𝑎𝑡 = {
𝛽
𝑝
𝑟
𝜙
}
Along with the states, the inputs are represented by the following expression.
𝑢 𝐿𝑎𝑡 = {
𝛿 𝐴
𝛿 𝑅
}
Once all of these expressions are understood, they are put into the state equation of the
state variable model. This is described below.
{
𝛽̇
𝑝̇
𝑟̇
𝜙̇}
= 𝐴 𝐿𝑎𝑡
̿̿̿̿̿̿{
𝛽
𝑝
𝑟
𝜙
} + 𝐵 𝐿𝑎𝑡
̿̿̿̿̿̿ {
𝛿 𝐴
𝛿 𝑅
}
Where:
{
𝛽̇
𝑝̇
𝑟̇
𝜙̇}
=
[
𝑌𝛽
′
𝑌𝑝
′
𝑌𝑟
′
𝑌𝜙
′
𝐿 𝛽
′
𝐿 𝑝
′
𝐿 𝑟
′
0
𝑁𝛽
′
𝑁 𝑝
′
𝑁𝑟
′
0
0 1 tan( 𝛩1) 0 ]
{
𝛽
𝑝
𝑟
𝜙
} +
[
𝑌𝛿 𝐴
′
𝑌𝛿 𝑅
′
𝐿 𝛿 𝐴
′
𝐿 𝑅
′
𝑁 𝛿 𝐴
′
𝑁𝛿 𝑅
′
0 0 ]
{
𝛿 𝐴
𝛿 𝑅
}
The above equation is known as the state equation for the aircrafts lateral dynamics. To
complete the state variable model, the output equation is necessary. This is shown in the
following formula.
{
𝛽
𝑝
𝑟
𝜙
} = 𝐶 𝐿𝑜𝑛𝑔
̿̿̿̿̿̿̿ {
𝛽
𝑝
𝑟
𝜙
} + 𝐷 𝐿𝑜𝑛𝑔
̿̿̿̿̿̿̿{
𝛿 𝐴
𝛿 𝑅
}
Where:
{
𝛽
𝑝
𝑟
𝜙
} = [
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
]{
𝛽
𝑝
𝑟
𝜙
} + [
0 0
0 0
0 0
0 0
]{
𝛿 𝐴
𝛿 𝑅
}](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-11-2048.jpg)
![12
2.4 Augmentation of State Variable Model
2.4.1 Addition of Vertical Acceleration
Once the generic longitudinal state variable model is known, it is possible to add and
addition output for the system. This addition, although, must be a function of the state of the
system. To do this basic physics is used to derive the acceleration in the vertical direction for the
aircraft. This is represented in the following formula.
𝛼 𝑍 =
∑ 𝑓𝑍
𝑚
First the conservation of linear momentum equation in the z-direction must be found.
This equation is shown below.
(𝑓𝐴 𝑍
+ 𝑓𝑇𝑧
) = 𝑚[𝑉𝑃1
𝛼̇ − 𝑉𝑝1
𝑞] + 𝑚𝑔 sin( 𝛩1) 𝜃 − 𝑚𝑔 sin( 𝛩1)
Combining these equations yields:
𝛼 𝑍 =
∑ 𝑓𝑍
𝑚
=
𝑚[𝑉𝑃1
𝛼̇ − 𝑉𝑝1
𝑞] + 𝑚𝑔 sin( 𝛩1) 𝜃 − 𝑚𝑔 sin( 𝛩1)
𝑚
Which reduces to:
𝛼 𝑍 = [𝑉𝑃1
𝛼̇ − 𝑉𝑝1
𝑞] + 𝑔 sin( 𝛩1) 𝜃 − 𝑔 sin( 𝛩1)
After this equation is found, it should be noted that the “𝛼̇” equation derived above is
nested inside the equation. This changes the formula as shown below.
𝛼 𝑍 = [𝑉𝑃1
(𝑍 𝑢
′
𝑢 + 𝑍 𝛼
′
𝛼 + 𝑍 𝜃
′
𝜃 + 𝑍 𝑞
′
𝑞 + 𝑍 𝛿 𝐸
′
𝛿 𝐸) − 𝑉𝑝1
𝑞] + 𝑔 sin( 𝛩1) 𝜃 − 𝑔sin( 𝛩1) 𝛼
This equation reduces to the following.
𝛼 𝑍 = [𝑉𝑃1
𝑍 𝑢
′
𝑢 + 𝑉𝑃1
𝑍 𝛼
′
𝛼 − 𝑔 sin( 𝛩1) 𝛼 + 𝑉𝑃1
𝑍 𝜃
′
𝜃 + 𝑔sin( 𝛩1) 𝜃 + 𝑉𝑃1
𝑍 𝑞
′
𝑞 − 𝑉𝑝1
𝑞 + 𝑉𝑃1
𝑍𝛿 𝐸
′
𝛿 𝐸]
= (𝑉𝑃1
𝑍 𝑢
′
)𝑢 + (𝑉𝑃1
𝑍 𝛼
′
− 𝑔sin( 𝛩1))𝛼 + (𝑉𝑃1
𝑍 𝜃
′
+ 𝑔 sin( 𝛩1))𝜃 + (𝑉𝑃1
𝑍 𝑞
′
− 𝑉𝑝1
)𝑞 + (𝑉𝑃1
𝑍 𝛿 𝐸
′
)𝛿 𝐸
Once this equation is found, it is possible to add the double prime derivatives into the
expression. This is shown below.
𝛼 𝑍 = 𝑍 𝑢
′′
𝑢 + 𝑍 𝛼
′′
𝛼 + 𝑍 𝜃
′′
𝜃 + 𝑍 𝑞
′′
𝑞 + 𝑍 𝛿 𝐸
′′
𝛿 𝐸
Where:
𝑍 𝑢
′′
= 𝑉𝑃1
𝑍 𝑢
′
𝑍 𝛼
′′
= 𝑉𝑃1
𝑍 𝛼
′
− 𝑔 sin( 𝛩1)
𝑍 𝜃
′′
= 𝑉𝑃1
𝑍 𝜃
′
+ 𝑔 sin( 𝛩1) 𝑍 𝑞
′′
= 𝑉𝑃1
𝑍 𝑞
′
− 𝑉𝑝1
𝑍 𝛿 𝐸
′′
= 𝑉𝑃1
𝑍 𝛿 𝐸
′](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-12-2048.jpg)
![13
These derivatives are added to the output equation for the system. The changes to the
output equation are expressed as follows.
{
𝛼 𝑧
𝑢
𝛼
𝑞
𝜃 }
=
[
𝑍 𝑢
′′
𝑍 𝛼
′′
𝑍 𝑞
′′
𝑍 𝜃
′′
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1 ]
{
𝑢
𝛼
𝑞
𝜃
} +
[
𝑍 𝛿 𝐸
′′
0
0
0
0 ]
{ 𝛿 𝐸}
2.4.2 Addition of Altitude
Adding altitude to the longitudinal dynamics requires the derivation of the flight path
equations for an aircraft. These equations are shown in the following matrix.
(
𝑋̇ ′
𝑌̇ ′
𝑍̇ ′
)
= [
cos 𝛹 cos 𝛩 − sin 𝛹 cos 𝛷 + cos 𝛹 sin 𝛩 sin 𝛷 sin 𝛹 sin 𝛷 + cos 𝛹 sin 𝛩 cos 𝛷
sin 𝛹 cos 𝛩 cos 𝛹 cos 𝛷 + sin 𝛹 sin 𝛩 sin 𝛷 −sin 𝛷 cos 𝛹 + sin 𝛹 sin 𝛩 cos 𝛷
− sin 𝛩 cos 𝛩 sin 𝛷 cos 𝛩 cos 𝛷
] (
𝑈
𝑉
𝑊
)
To add altitude to the outputs only the trajectory in the z-direction is necessary. The
expression for altitude is the negative trajectory in the z-direction. This is expressed
mathematically below.
ℎ̇ = −𝑍̇ ′
= 𝑈 sin 𝛩 − 𝑉 cos 𝛩 sin 𝛷 − 𝑊 cos 𝛩 cos 𝛷
Using the small perturbations assumption for the aircraft, the above equation is reduced
as such.
ℎ̇ = −𝑍̇ ′
= 𝑉𝑃1
θ − 𝑤
Where:
𝑤 = 𝑉𝑃1
𝛼
Yielding:
ℎ̇ = −𝑍̇′
= 𝑉𝑃1
𝜃 − 𝑉𝑃1
𝛼 = 𝑉𝑃1
( 𝜃 − 𝛼)
Once this expression is found, it is possible to add this equation to the longitudinal state
variable model for the aircraft. This is represented in the state matrix below.](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-13-2048.jpg)
![14
{
𝑢̇
𝛼̇
𝑞̇
𝜃̇
ℎ̇ }
=
[
𝑋 𝑢
′
𝑋 𝛼
′
𝑋 𝑞
′
𝑋 𝜃
′
0
𝑍 𝑢
′
𝑍 𝛼
′
𝑍 𝑞
′
𝑍 𝜃
′
0
𝑀 𝑢
′
𝑀 𝛼
′
𝑀 𝑞
′
𝑀 𝜃
′
0
0 0 1 0 0
0 −𝑉𝑃1
0 𝑉𝑃1
0]{
𝑢
𝛼
𝑞
𝜃
ℎ}
+
[
𝑋 𝛿 𝐸
′
𝑍 𝛿 𝐸
′
𝑀𝛿 𝐸
′
0
0 ]
{ 𝛿 𝐸}
2.4.3 Addition of Flight Path Angle
To add the flight path angle of the aircraft to the state variable model, this angle must be
modeled with respect to the state variables. This is done in the following formula.
𝛾 = 𝜃 − 𝛼
This changes the output matrix of the longitudinal state variable model as such.
{
𝑢
𝛼
𝑞
𝜃
𝛾}
=
[
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
0 −1 0 1]
{
𝑢
𝛼
𝑞
𝜃
} +
[
0
0
0
0
0]
{ 𝛿 𝐸}
2.4.4 Addition of Lateral Acceleration
To add the lateral velocity to the outputs of the lateral state variable model, basic physics
are followed. They derive the acceleration in the lateral direction for the aircraft. This is
represented in the following formula.
𝛼 𝑌 =
∑ 𝑓𝑌
𝑚
First the conservation of linear momentum equation in the z-direction must be found.
This equation is shown below.
(𝑓𝐴 𝑌
+ 𝑓𝑇𝑌
) = 𝑚[𝑉𝑃1
𝛽̇ − 𝑉𝑝1
𝑟] − 𝑚𝑔 cos( 𝛩1) 𝜙
Combining these equations yields:
𝛼 𝑌 =
∑ 𝑓𝑌
𝑚
=
𝑚[𝑉𝑃1
𝛽̇ − 𝑉𝑝1
𝑟] − 𝑚𝑔 cos( 𝛩1) 𝜙
𝑚
Which reduces to:
𝛼 𝑌 = [𝑉𝑃1
𝛽̇ − 𝑉𝑝1
𝑟] − 𝑔cos( 𝛩1) 𝜙
After this equation is found, it should be noted that the “𝛽̇” equation derived above is
nested inside the equation. This changes the formula as shown below.
𝛼 𝑌 = [𝑉𝑃1
(𝑌𝛽
′
𝛽 + 𝑌𝑝
′
𝑝 + 𝑌𝑟
′
𝑟 + 𝑌𝜙
′
𝜙 + 𝑌𝛿 𝐴
′
𝛿 𝐴 + 𝑌𝛿 𝐴
′
𝛿 𝑅) − 𝑉𝑝1
𝑟] − 𝑔 cos( 𝛩1) 𝜙](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-14-2048.jpg)
![15
This equation reduces to the following.
𝛼 𝑌 = (𝑉𝑃1
𝑌𝛽
′
)𝛽+ (𝑉𝑃1
𝑌𝑝
′
)𝑝 + (𝑉𝑃1
( 𝑌𝑟
′
+ 1)) 𝑟 + (𝑉𝑃1
(𝑌𝜙
′
− 𝑔cos( 𝛩1))) 𝜙 + (𝑉𝑃1
𝑌𝛿 𝐴
′
)𝛿 𝐴
+ (𝑉𝑃1
𝑌𝛿 𝑅
′
)𝛿 𝑅
Once this equation is found, it is possible to add the double prime derivatives into the
expression. This is shown below.
𝛼 𝑌 = 𝑌𝛽
′′
𝛽 + 𝑌𝑝
′′
𝑝+ 𝑌𝑟
′′
𝑟+ 𝑌𝜙
′′
𝜙 + 𝑌𝛿 𝐴
′′
𝛿 𝐴 + 𝑌𝛿 𝑅
′′
𝛿 𝑅
Where:
𝑌𝛽
′′
= 𝑉𝑃1
𝑌𝛽
′
𝑌𝜙
′′
= 𝑉𝑃1
(𝑌𝜙
′
− 𝑔cos( 𝛩1))
𝑌𝑝
′′
= 𝑉𝑃1
𝑌𝑝
′ 𝑌𝛿 𝐴
′′
= 𝑉𝑃1
𝑌𝛿 𝐴
′
𝑌𝑟
′′
= 𝑉𝑃1
( 𝑌𝑟
′
+ 1) 𝑌𝛿 𝑅
′′
= 𝑉𝑃1
𝑌𝛿 𝑅
′
These derivatives are added to the output equation for the system. The changes to the
output equation are expressed as follows.
{
𝛼 𝑌
𝛽
𝑝
𝑟
𝜙 }
=
[
𝑌𝛽
′′
𝑌𝑝
′′
𝑌𝑟
′′
𝑌𝜙
′′
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1 ]
{
𝛽
𝑝
𝑟
𝜙
} +
[
𝑌𝛿 𝐴
′′
𝑌𝛿 𝑅
′′
0 0
0 0
0 0
0 0 ]
{
𝛿 𝐴
𝛿 𝑅
}
2.5 Overall State Variable Model
After the augmentation of the state variable model is understood, the overall system can
be shown in one model. This is described for the state equation as shown below.
{
𝑢̇
𝛼̇
𝑞̇
𝜃̇
𝛽̇
𝑝̇
𝑟̇
𝜙̇ }
=
{
𝑋 𝑢
′
𝑋 𝛼
′
𝑋 𝑞
′
𝑋 𝜃
′
0 0 0 0
𝑍 𝑢
′
𝑍 𝛼
′
𝑍 𝑞
′
𝑍 𝜃
′
0 0 0 0
𝑀 𝑢
′
𝑀 𝛼
′
𝑀 𝑞
′
𝑀 𝜃
′
0 0 0 0
0 0 1 0 0 0 0 0
0 0 0 0 𝑌𝛽
′
𝑌𝑝
′
𝑌𝑟
′
𝑌𝜙
′
0 0 0 0 𝐿 𝛽
′
𝐿 𝑝
′
𝐿 𝑟
′
0
0 0 0 0 𝑁𝛽
′
𝑁 𝑝
′
𝑁𝑟
′
0
0 0 0 0 0 1 tan( 𝛩1) 0 }
{
𝑢
𝛼
𝑞
𝜃
𝛽
𝑝
𝑟
𝜙}
+
{
𝑋𝛿 𝐸
′
𝑍 𝛿 𝐸
′
𝑀 𝛿 𝐸
′
0
0 0
0 0
0 0
0 0
0
0
0
0
𝑌𝛿 𝐴
′
𝑌𝛿 𝑅
′
𝐿 𝛿 𝐴
′
𝐿 𝑅
′
𝑁 𝛿 𝐴
′
𝑁𝛿 𝑅
′
0 0 }
{
𝛿 𝐸
𝛿 𝐴
𝛿 𝑅
}](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-15-2048.jpg)


![18
{
𝑢̇
𝛼̇
𝑞̇
𝜃̇
} = [
−0.0197 8.435 0 −32.16
0 −0.6644 0.9960 −0.0022
0 −7.112 −1.321 0
0 0 1 0
]{
𝑢
𝛼
𝑞
𝜃
} + [
0
−0.0520
−14.27
0
]{ 𝛿 𝐸}
Augmenting this equation to contain the altitude of the aircraft expands the matrix as
such.
{
𝑢̇
𝛼̇
𝑞̇
𝜃̇
ℎ̇ }
=
[
−0.0197 8.435 0 −32.16 0
0 −0.6644 0.9960 −0.0022 0
0 −7.112 −1.321 0 0
0 0 1 0 0
0 −677 0 677 0]{
𝑢
𝛼
𝑞
𝜃
ℎ}
+
[
0
−0.0520
−14.27
0
0 ]
{ 𝛿 𝐸}
After the state equation is found, the output equation is necessary. The basic output
equation for the aircraft is shown below.
{
𝑢
𝛼
𝑞
𝜃
} = [
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
] {
𝑢
𝛼
𝑞
𝜃
} + [
0
0
0
0
]{ 𝛿 𝐸}
Similar to the state equation, the equation is augmented to include more outputs. The
first addition to the output equation is the vertical acceleration. The first step in including this in
the output equation is solving for the double primed derivatives for the aircraft. These values are
shown in the following table.
Table 3: Longitudinal Double Primed Derivatives
Longitudinal Double Primed Derivatives
𝑍 𝑢
′′
-0.1380 𝑍 𝜃
′′
0.0020
𝑍 𝛼
′′
-451.3 𝑍 𝛿 𝐸
′′
-35.23
𝑍 𝑞
′′
-2.731
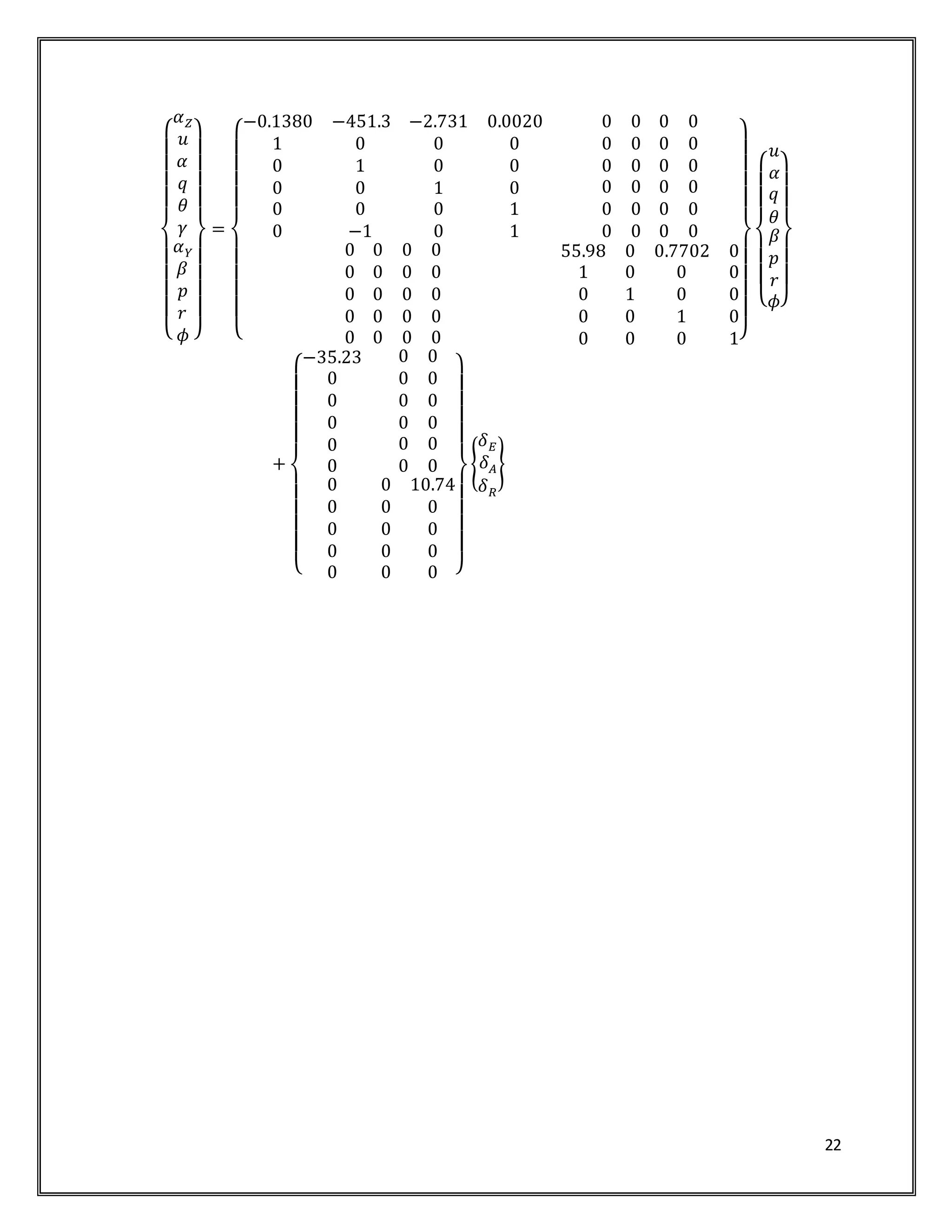
This changes the output equation for the aircraft as shown below.
{
𝛼 𝑧
𝑢
𝛼
𝑞
𝜃 }
=
[
−0.1380 −451.3 −2.731 0.0020
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1 ]
{
𝑢
𝛼
𝑞
𝜃
} +
[
−35.23
0
0
0
0 ]
{ 𝛿 𝐸}](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-18-2048.jpg)
![19
This describes the vertical acceleration augmentation to the output equation. Similarly,
the output equation can then be altered to include the flight path angle. This is done by changing
the output matrix as such.
{
𝛼 𝑧
𝑢
𝛼
𝑞
𝜃
𝛾 }
=
[
−0.1380 −451.3 −2.731 0.0020
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
0 −1 0 1 ]
{
𝑢
𝛼
𝑞
𝜃
} +
[
−35.23
0
0
0
0
0 ]
{ 𝛿 𝐸}
3.2 Lateral State Variable Model
When solving the state variable model for the lateral direction, a set of steps is carried
out. First, the dimensional derivatives for the aircraft must be known. These derivatives are
from the aircraft dynamics and are shown in the table below.
Table 4: Lateral Stability and Control Derivatives
Lateral Stability and Control Derivatives
𝑌𝛽 55.98 𝐿 𝛽 -4.147 𝑁𝛽 2.839
𝑌𝑝 0 𝐿 𝑝 -0.4260 𝑁 𝑇𝛽
0
𝑌𝑟 0.7702 𝐿 𝑟 0.1515 𝑁 𝑝 -0.0045
𝑌𝛿 𝐴
0 𝐿 𝛿 𝐴
6.711 𝑁𝑟 -0.1123
𝑌𝛿 𝑅
10.74 𝐿 𝛿 𝑅
0.7163 𝑁𝛿 𝐴
-0.4471
𝑁𝛿 𝑟
-1.654
After these values are found, the single primed derivatives for the state variable model
are needed. These values are defined as follows.
Table 5: Lateral Single Primed Derivatives
Lateral Single Primed Derivatives
𝑌𝛽
′
0.0827 𝐿 𝛽
′
-4.107 𝑁𝛽
′
2.804
𝑌𝑝
′
0 𝐿 𝑝
′
-0.4261 𝑁 𝑝
′
-0.0081
𝑌𝑟
′
-0.9989 𝐿 𝑟
′
0.1499 𝑁𝑟
′
-0.1110
𝑌𝜙
′
0.0475 𝐿 𝛿 𝐴
′
6.705 𝑁𝛿 𝐴
′
-0.3901
𝑌𝛿 𝐴
′
0 𝐿 𝛿 𝑅
′
0.6927 𝑁𝛿 𝑅
′
-1.649
𝑌𝛿 𝑅
′
0.0159](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-19-2048.jpg)
![20
The state equation for aircraft is generated from these derivatives. The state equation is
shown in the next formula.
{
𝛽̇
𝑝̇
𝑟̇
𝜙̇}
= [
0.0827 0 −0.9989 0.0475
−4.107 −0.4261 0.1499 0
2.804 −0.0081 −0.1110 0
0 1 0.0472 0
]{
𝛽
𝑝
𝑟
𝜙
} + [
0 0.0159
6.705 0.6927
−0.3901 −1.649
0 0
]{
𝛿 𝐴
𝛿 𝑅
}
Once the state equation is found, the output equation must be known. The first step in
solving for the output matrix is augmenting the matrix to include lateral acceleration. The first
step in including this in the output equation is solving for the double primed derivatives for the
aircraft. These values are shown in the following table.
Table 6: Lateral Double Primed Derivatives
Lateral Double Primed Derivatives
𝑌𝛽
′′
55.98 𝑌𝜙
′′
0
𝑌𝑝
′′
0 𝑌𝛿 𝐴
′′
0
𝑌𝑟
′′
0.7702 𝑌𝛿 𝑅
′′
10.74
These derivatives are added to the output equation for the system. The changes to the
output equation are expressed as follows.
{
𝛼 𝑌
𝛽
𝑝
𝑟
𝜙 }
=
[
55.98 0 0.7702 0
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1]
{
𝛽
𝑝
𝑟
𝜙
} +
[
0 10.74
0 0
0 0
0 0
0 0 ]
{
𝛿 𝐴
𝛿 𝑅
}
3.3 Overall State Variable Model
The overall state variable model for the aircraft can be seen in the following equations
{
𝑢̇
𝛼̇
𝑞̇
𝜃̇
𝛽̇
𝑝̇
𝑟̇
𝜙̇ }
= {
𝐴 𝐿𝑜𝑛𝑔 0
0 𝐴 𝐿𝑎𝑡
}
{
𝑢
𝛼
𝑞
𝜃
𝛽
𝑝
𝑟
𝜙}
+ {
𝐵 𝐿𝑜𝑛𝑔 0
0 𝐵 𝐿𝑎𝑡
} {
𝛿 𝐸
𝛿 𝐴
𝛿 𝑅
}](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-20-2048.jpg)











![38
%Longitudinal Dimensional Stability Derivatives
Xu=(-q1*S*(CDu+(2*CD1)))/(m*Vp1);
XTu=(q1*S*(CTxu+(2*(CTx1))))/(m*Vp1);
Xa=(-q1*S*(CDa-CL1))/(m);
Zu=(-q1*S*(CLu+(2*CL1)))/(m*Vp1);
Za=(-q1*S*(CLa+CD1))/m;
Zadot=-(q1*S*cbar*CLadot)/(2*m*Vp1);
Zq=-(q1*S*cbar*CLq)/(2*m*Vp1);
Mu=(q1*S*cbar*(Cmu+(2*Cm1)))/(IyyB*Vp1);
MTu=(q1*S*cbar*(CmTu+(2*CmT1)))/(IyyB*Vp1);
Ma=(q1*S*cbar*Cma)/IyyB;
MTa=(q1*S*cbar*CmTa)/IyyB;
Madot=(q1*S*cbar^2*Cmadot)/(2*IyyB*Vp1);
Mq=(q1*S*cbar^2*Cmq)/(2*IyyB*Vp1);
%Longitudinal Dimensional Control Derivatives
XdE=-(q1*S*CDdE)/m;
ZdE=-(q1*S*CLdE)/m;
MdE=(q1*S*cbar*CmdE)/IyyB;
%Primed Longitudinal Dimensional Stability Derivatives
XuP=(Xu+XTu);
XaP=Xa;
XthetaP=-g*cos(theta1);
XqP=0;
XdEP=XdE;
ZuP=Zu/(Vp1-Zadot);
ZaP=Za/(Vp1-Zadot);
ZqP=(Zq+Vp1)/(Vp1-Zadot);
ZthetaP=-(g*sin(theta1))/(Vp1-Zadot);
ZdEP=ZdE/(Vp1-Zadot);
MuP=(Madot*ZuP)+Mu;
MaP=(Madot*ZaP)+Ma;
MthetaP=Madot*ZthetaP;
MqP=(Madot*ZqP)+Mq;
MdEP=(Madot*ZdEP)+MdE;
%Double Primed Longitudinal Dimensional Stability Derivatives
ZuPP=ZuP*Vp1;
ZaPP=(ZaP*Vp1)-(g*sin(theta1));
ZqPP=(ZqP-1)*Vp1;
ZthetaPP=(ZthetaP*Vp1)+(g*sin(theta1));
ZdEPP=ZdEP*Vp1;
%State Matricies
A=[XuP XaP XqP XthetaP
ZuP ZaP ZqP ZthetaP
MuP MaP MqP MthetaP
0 0 1 0];
B=[XdEP
ZdEP
MdEP
0];
C=[ZuPP ZaPP ZqPP ZthetaPP
1 0 0 0](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-38-2048.jpg)
![39
0 1 0 0
0 0 1 0
0 0 0 1
0 -1 0 1];
D=[ZdEPP
0
0
0
0
0];
sysSS=ss(A,B,C,D);
%Simulation
tSS=[0:.01 :120];
sizet=max(size(tSS));
for hi=1:sizet;
dESS(hi)=0;
end;
for hi=200:300;
dESS(hi)=-3/57.3;
end;
for hi=700:800;
dESS(hi)=3/57.3;
end;
y=lsim(sysSS,dESS,tSS);
azSS=y(:,1)*(1/32.17)+1;
aSS=y(:,3)*57.3;
uSS=y(:,2);
qSS=y(:,4)*57.3;
thetaSS=y(:,5)*57.3;
gamSS=y(:,6)*57.3
dESS=dESS*57.3;
%Plotting
clf;
hold on
grid on
d=eig(A);
figure(1)
plot(d,'k*')
omsp=sqrt(abs(d(1,1)^2))
dampsp=abs(real(d(1,1)))/(omsp)
omph=sqrt(abs(d(3,1)^2))
dampph=abs(real(d(3,1)))/(omph)
figure(2)
subplot(4,2,1);
plot(tSS,azSS,'k');
xlabel('Time (s)');
ylabel('a(z) (g)');
grid on
subplot(4,2,2);
plot(tSS,aSS,'k');
xlabel('Time (s)');](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-39-2048.jpg)

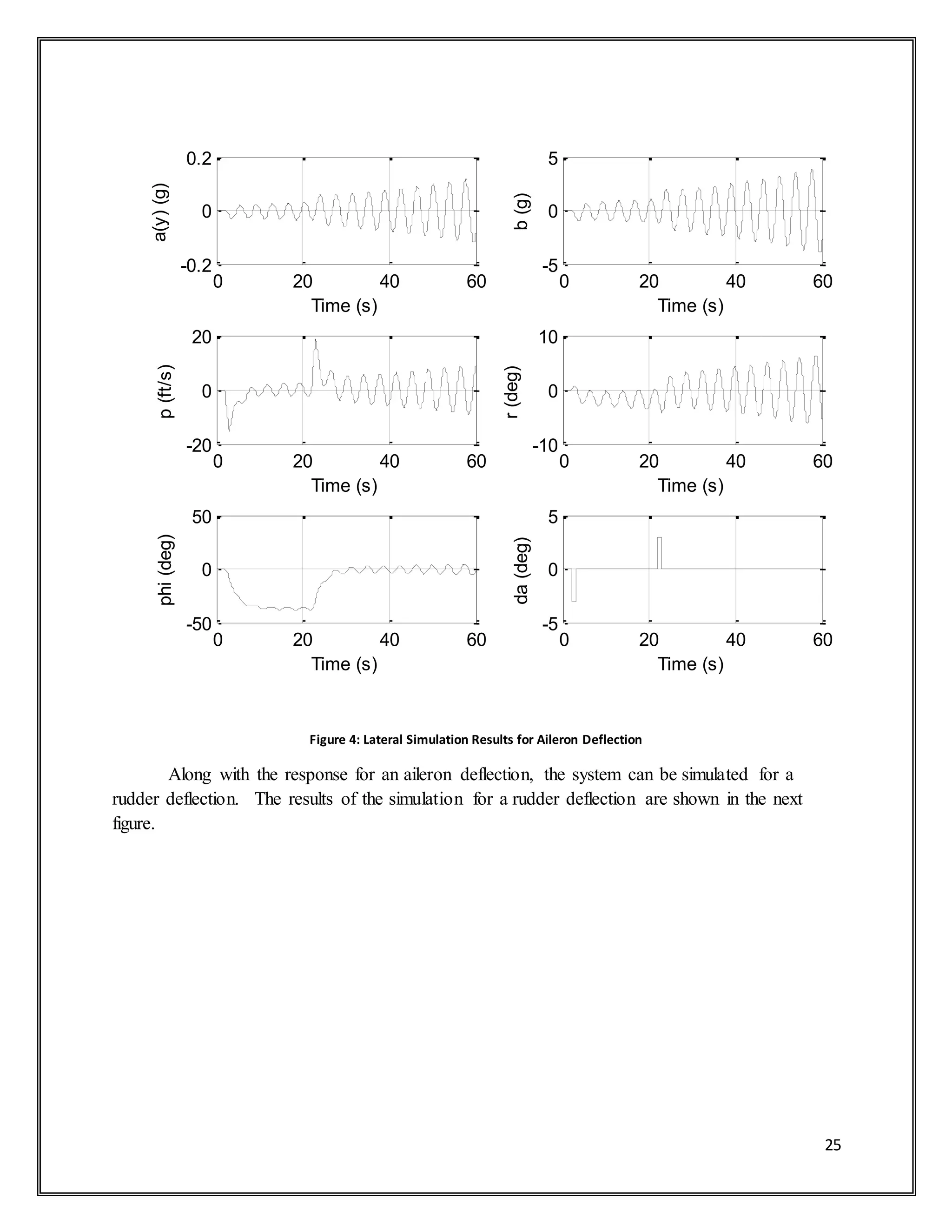
![41
8.2 Appendix B – Simple Matlab Code for Lateral Direction
%Aircraft:Cessna Learjet 24
%Flight Condition:Cruise (max weight)
%Flight Condition
Vp1=677;
M=0.7;
alpha1=2.7/57.3;
theta1=alpha1;
q1=134.6;
g=32.2;
cbar=7;
b=34;
xcgbar=0.32;
S=230;
%Mass and Inertial Properties
W=13000;
m=(W/g);
IxxB=28000;
IyyB=18800;
IzzB=47000;
IxzB=1300;
%Lateral Directional Stability Derivatives
Clb=-0.11;
Clp=-0.45;
Clr=0.16;
Cyb=--0.73;
Cyp=0;
Cyr=0.4;
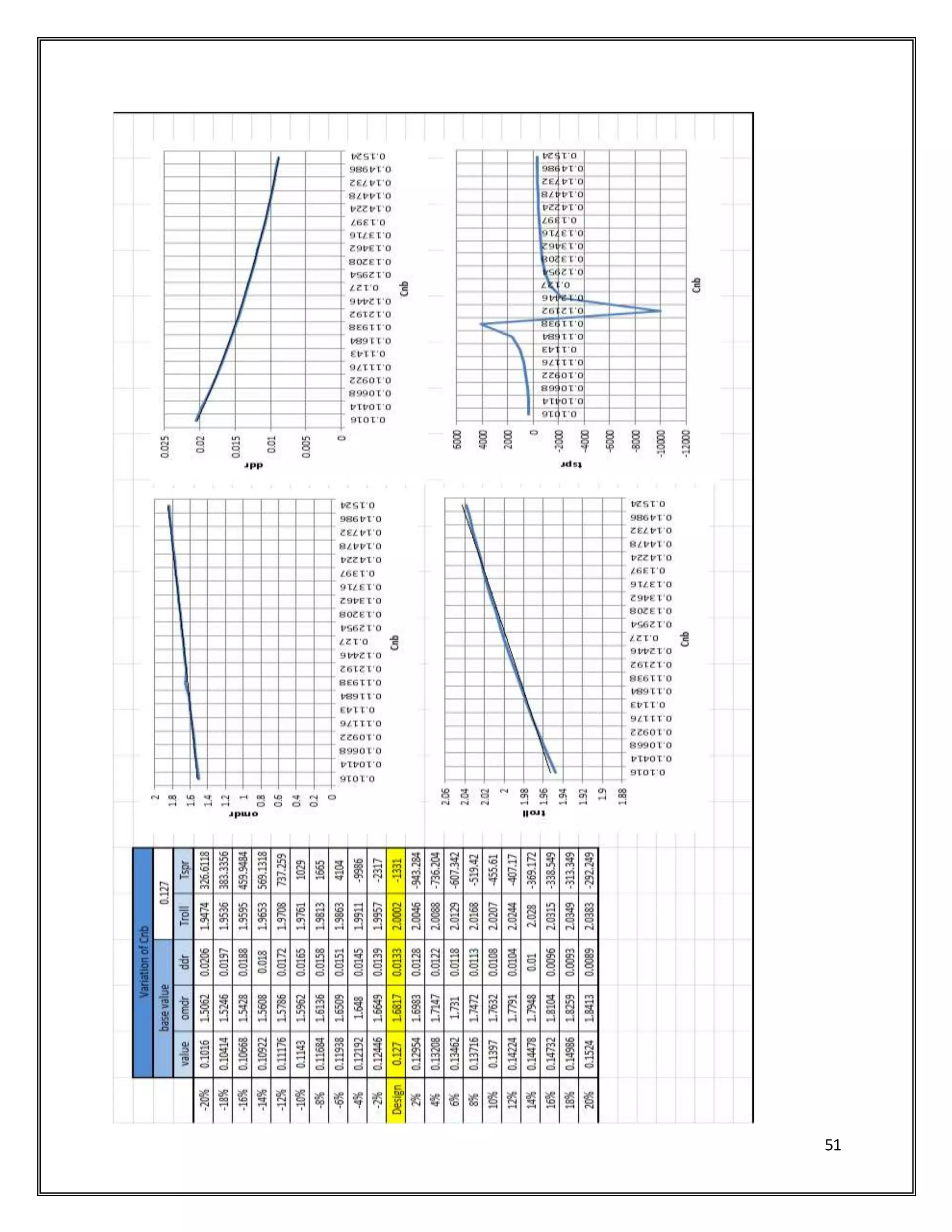
Cnb=0.127;
Cnp=-0.008;
Cnr=-0.24;
%Lateral Directional Control Derivatives
Clda=0.178;
Cldr=0.019;
Cyda=0;
Cydr=0.14;
Cnda=-0.02;
Cndr=-0.074;
%Matrix Transformation of the Moments of Inertia
A=[(cos(alpha1))^2,(sin(alpha1))^2,-sin(2*alpha1);
(sin(alpha1))^2,(cos(alpha1))^2,sin(2*alpha1);
(0.5*sin(2*alpha1)),(-0.5*sin(2*alpha1)),(cos(2*alpha1))];
moi=[IxxB IzzB IxzB]';
c=A*moi;
Ixx=c(1,1);
Izz=c(2,1);
Ixz=c(3,1);
I1=(Ixz/Ixx);
I2=(Ixz/Izz);](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-41-2048.jpg)
![42
%Lateral Directional Dimensional Stability Derivatives
Yb=(q1*S*Cyb)/m;
Yp=(q1*S*b*Cyp)/(2*m*Vp1);
Yr=(q1*S*b*Cyr)/(2*m*Vp1);
Lb=(q1*S*b*Clb)/Ixx;
Lp=(q1*S*(b^2)*Clp)/(2*Ixx*Vp1);
Lr=(q1*S*(b^2)*Clr)/(2*Ixx*Vp1);
Nb=(q1*S*b*Cnb)/Izz;
Np=(q1*S*(b^2)*Cnp)/(2*Izz*Vp1);
Nr=(q1*S*(b^2)*Cnr)/(2*Izz*Vp1);
%Lateral Directional Dimensional Control Derivatives
Yda=(q1*S*Cyda)/m;
Ydr=(q1*S*Cydr)/m;
Lda=(q1*S*b*Clda)/Ixx;
Ldr=(q1*S*b*Cldr)/Ixx;
Nda=(q1*S*b*Cnda)/Izz;
Ndr=(q1*S*b*Cndr)/Izz;
%Primed Lateral Dimensional Stability Derivatives
YbP=Yb/Vp1;
YpP=Yp/Vp1;
YrP=(Yr-Vp1)/Vp1;
YphiP=g*cos(theta1)/Vp1;
YdaP=Yda/Vp1;
YdrP=Ydr/Vp1;
LbP=(Lb+I1*Nb)/(1-I1*I2);
LpP=(Lp+I1*Np)/(1-I1*I2);
LrP=(Lr+I1*Nr)/(1-I1*I2);
LdaP=(Lda+I1*Nda)/(1-I1*I2);
LdrP=(Ldr+I1*Ndr)/(1-I1*I2);
NbP=(I2*Lb+Nb)/(1-I1*I2);
NpP=(I2*Lp+Np)/(1-I1*I2);
NrP=(I2*Lr+Nr)/(1-I1*I2);
NdaP=(I2*Lda+Nda)/(1-I1*I2);
NdrP=(I2*Ldr+Ndr)/(1-I1*I2);
%Double Primed Longitudinal Dimensional Stability Derivatives
YbPP=YbP*Vp1;
YpPP=YpP*Vp1;
YrPP=Vp1*(YrP+1);
YphiPP=(YphiP*Vp1)-(g*cos(theta1));
YdaPP=YdaP*Vp1;
YdrPP=YdrP*Vp1;
%State Matricies
A=[YbP YpP YrP YphiP
LbP LpP LrP 0
NbP NpP NrP 0
0 1 tan(theta1) 0];
B=[YdaP YdrP
LdaP LdrP
NdaP NdrP
0 0];
C=[YbPP YpPP YrPP YphiPP
1 0 0 0](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-42-2048.jpg)
![43
0 1 0 0
0 0 1 0
0 0 0 1];
D=[YdaPP YdrPP
0 0
0 0
0 0
0 0];
sysSS=ss(A,B,C,D);
d=eig(A)
omdr=sqrt(abs(d(2,1)^2))
ddr=(abs(real(d(2,1)))/omdr)
troll=-1/(d(3,1))
tspr=-1/(d(4,1))
%Simulation
tSS=[0:0.01:60];
sizet=max(size(tSS));
for hi=1:sizet;
dr(hi,1)=0;
da(hi,1)=0;
end;
for hi=200:300;
dr(hi,1)=-1/57.3;
end;
for hi=2200:2300;
dr(hi,1)=1/57.3;
end
u=[da,dr];
y=lsim(sysSS,u,tSS);
aySS=y(:,1)*(1/32.17);
pSS=y(:,3)*57.3;
bSS=y(:,2)*57.3;
rSS=y(:,4)*57.3;
phiSS=y(:,5)*57.3;
daSS=da*57.3;
drSS=dr*57.3;
%Plotting
clf;
hold on
figure(1)
subplot(3,2,1);
plot(tSS,aySS,'k');
xlabel('Time (s)');
ylabel('a(y) (g)');
grid on
subplot(3,2,2);](https://image.slidesharecdn.com/statespacedesign-181010001219/75/State-space-design-43-2048.jpg)