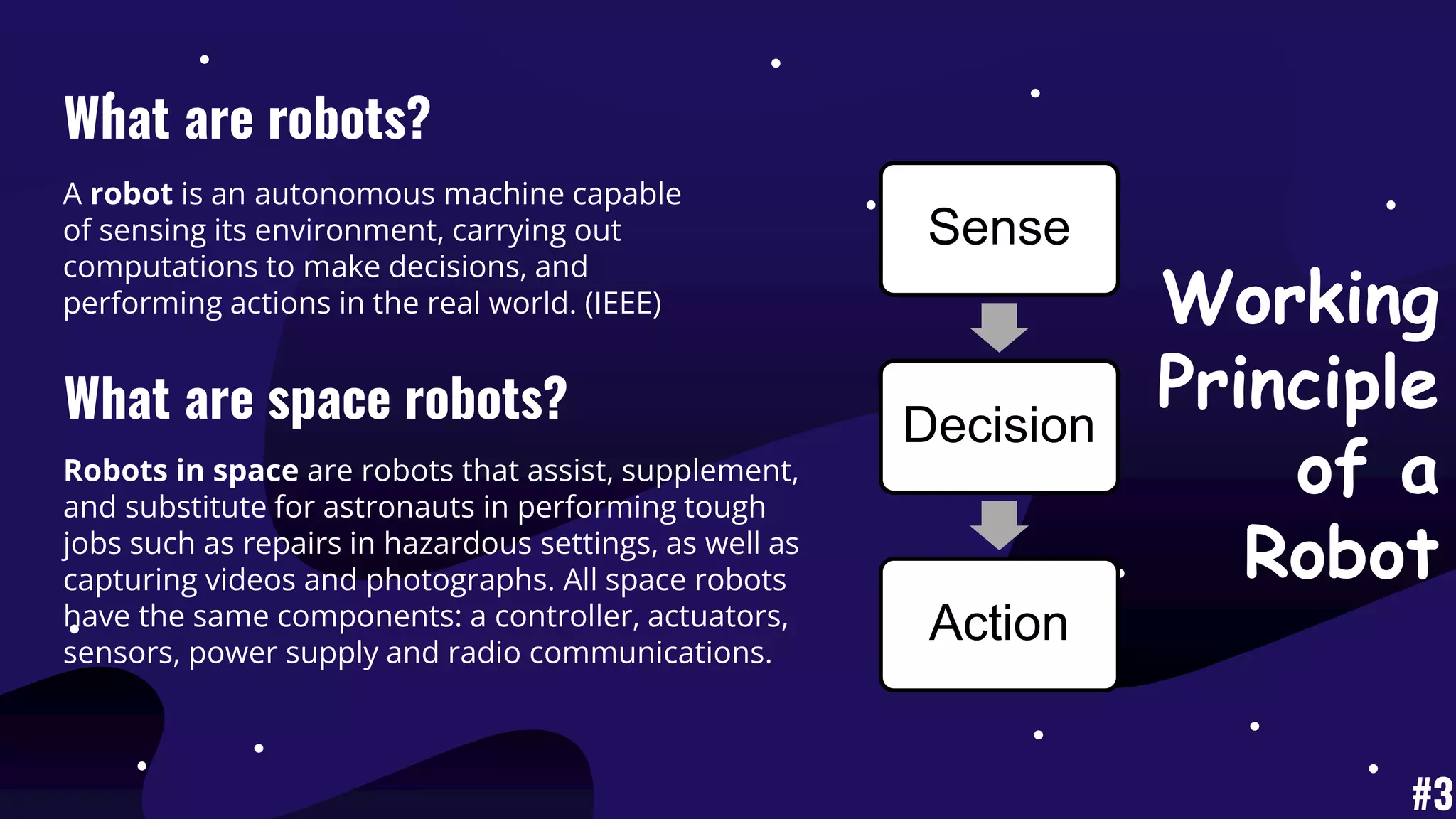
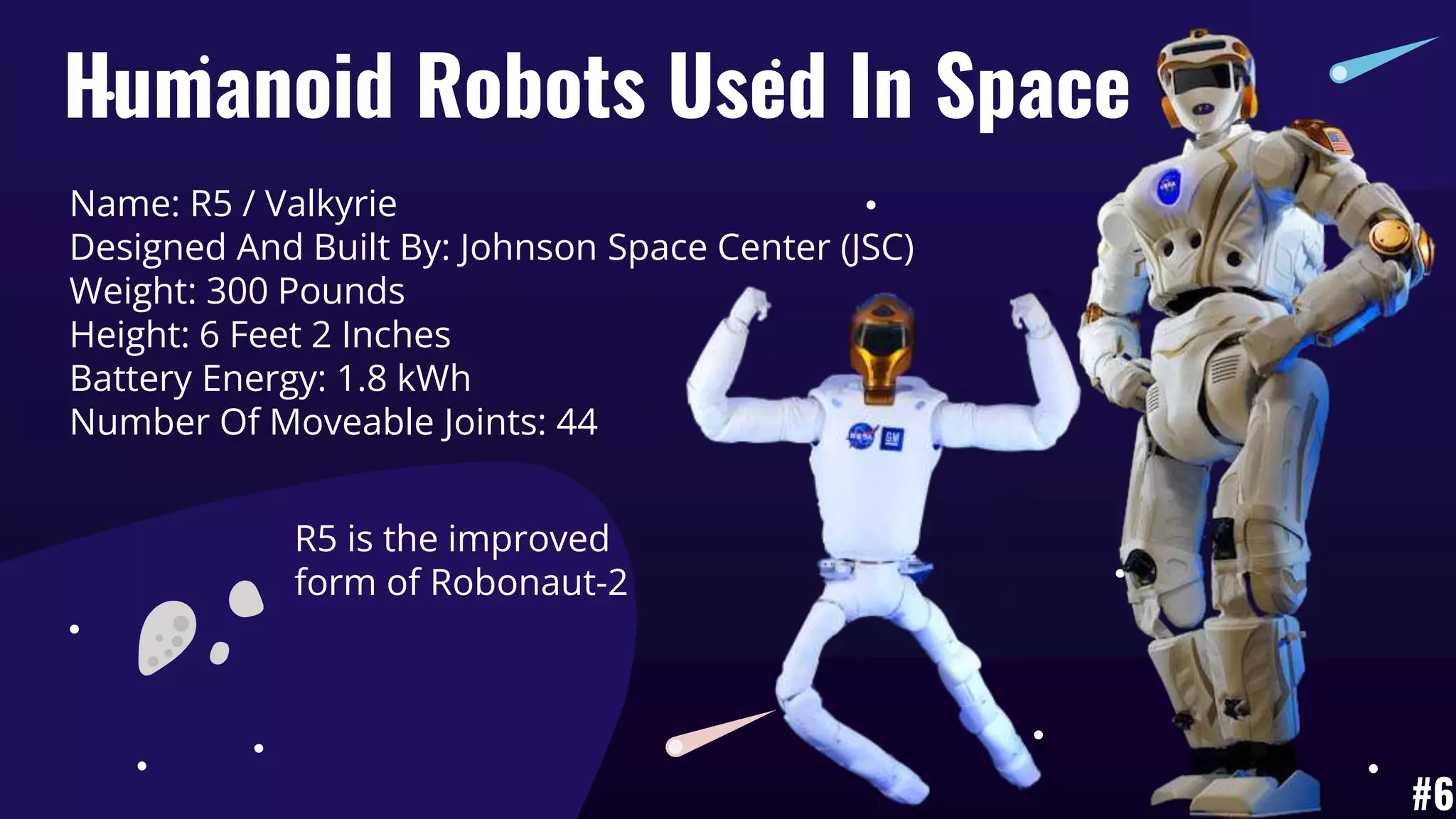
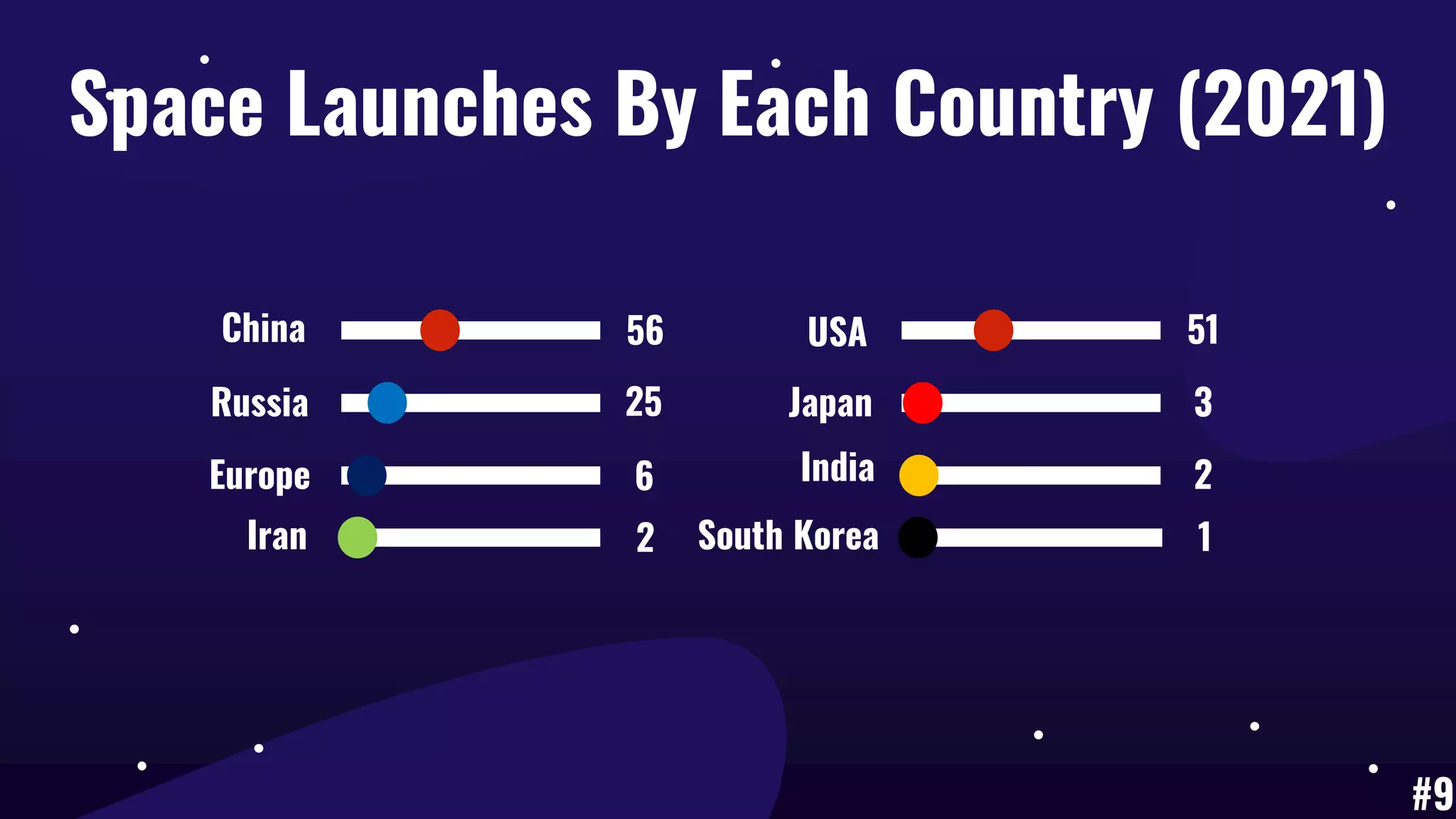
The document discusses the role of robots in space exploration, defining them as autonomous machines that assist astronauts in difficult tasks. It highlights the advantages of using robots in harsh environments and provides examples of various rovers and humanoid robots used in missions, including their specifications and launch dates. Additionally, it presents statistics on space robotics, including market forecasts and the number of satellites and robotic spacecraft launched.