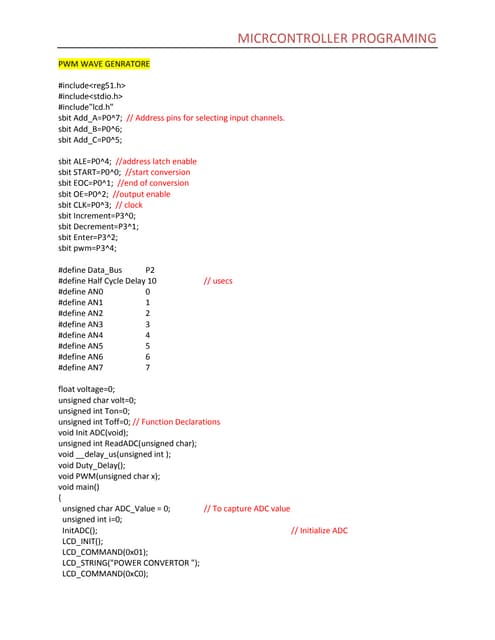

The document discusses PWM control of servo motors using the S3C6410 microprocessor. It describes how the S3C6410 contains timers that can generate PWM signals to control servo position and speed. It provides code examples for initializing the timers for PWM output and setting the register values to control the duty cycle and period of the PWM signal. User space code is also shown for opening and configuring the PWM device files.
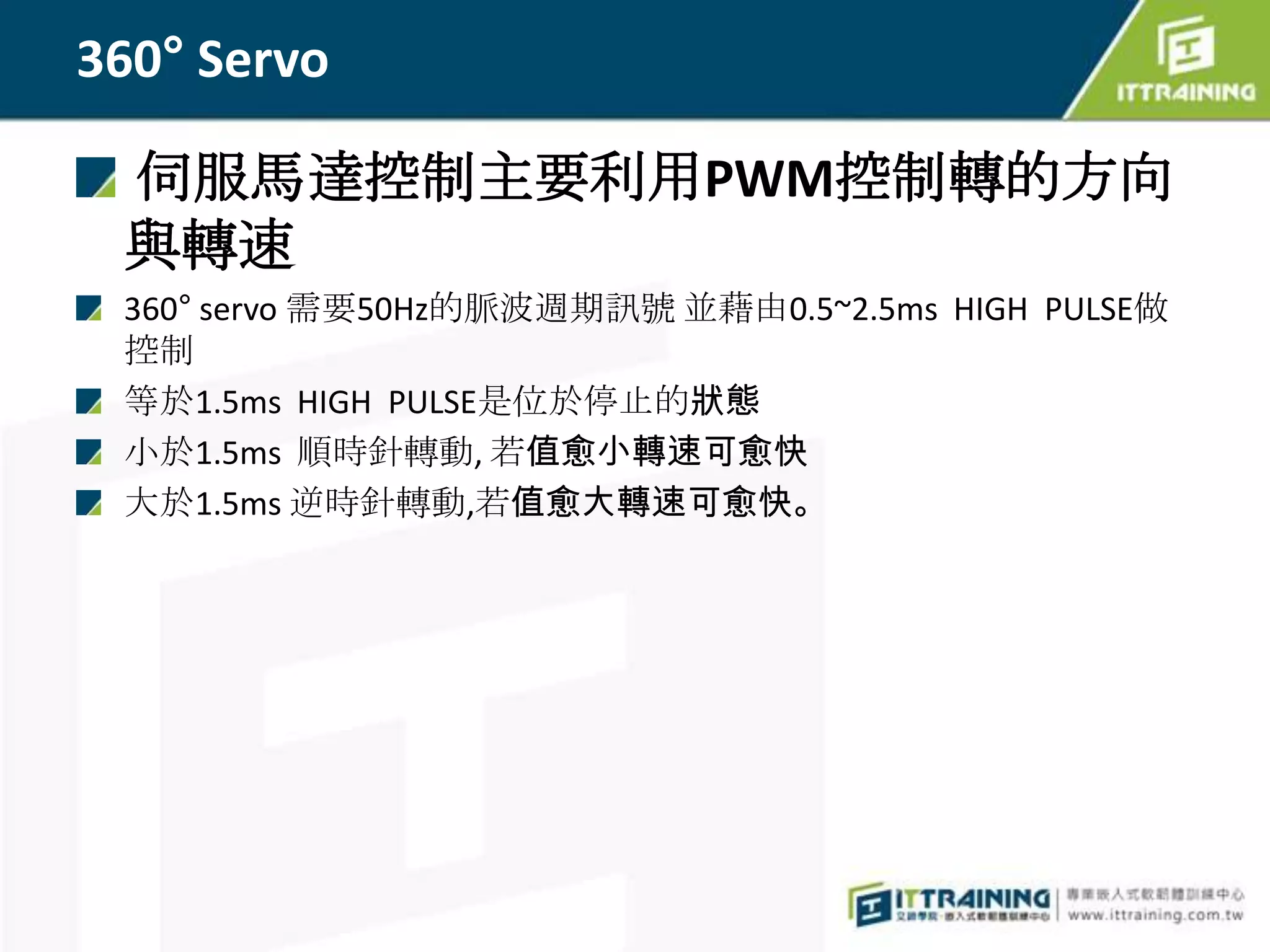
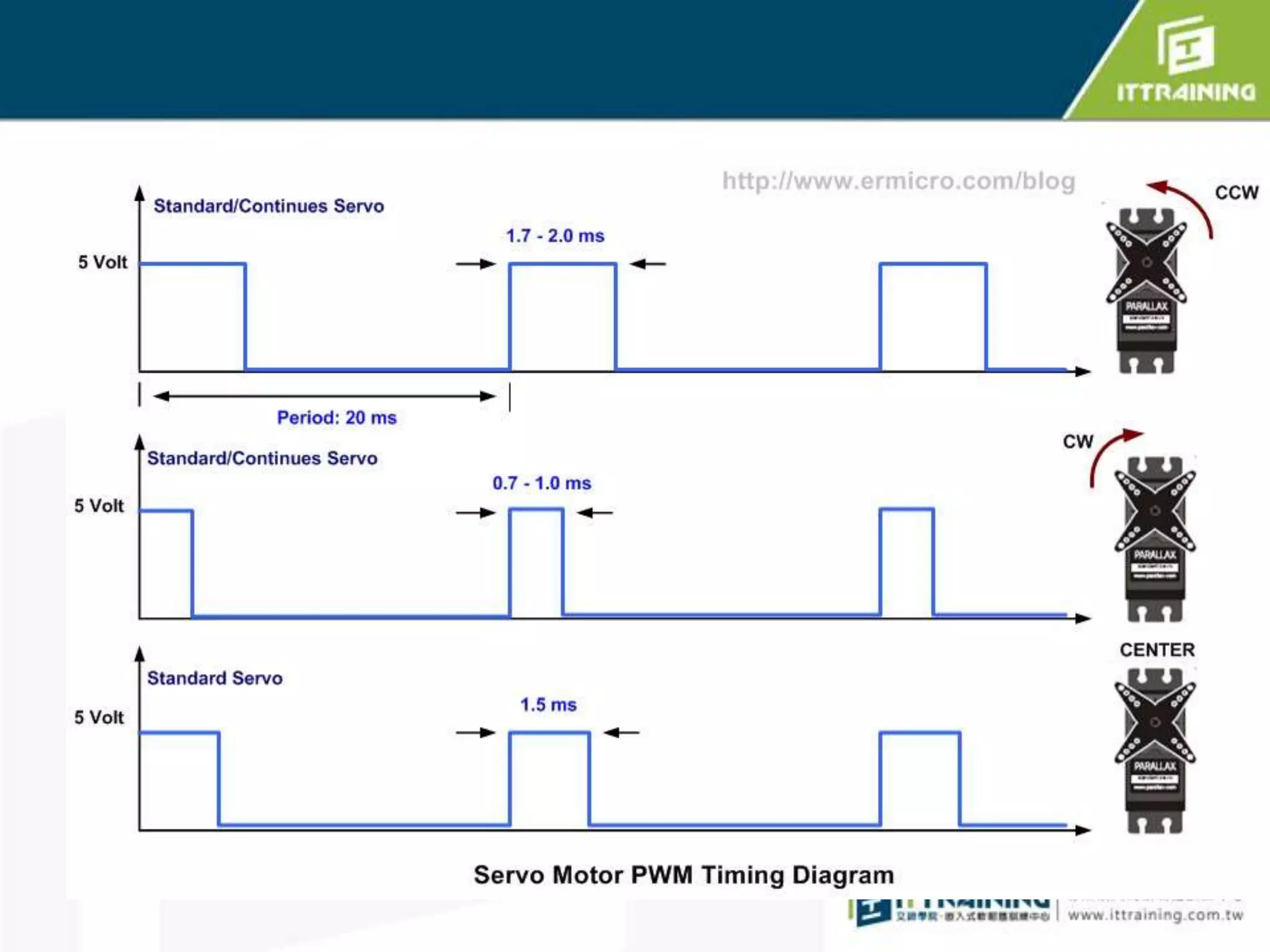
Introduction to servo motor control by Joseph Chen, explaining 360° servo mechanics, PWM control of direction and speed, with pulse durations affecting movement.
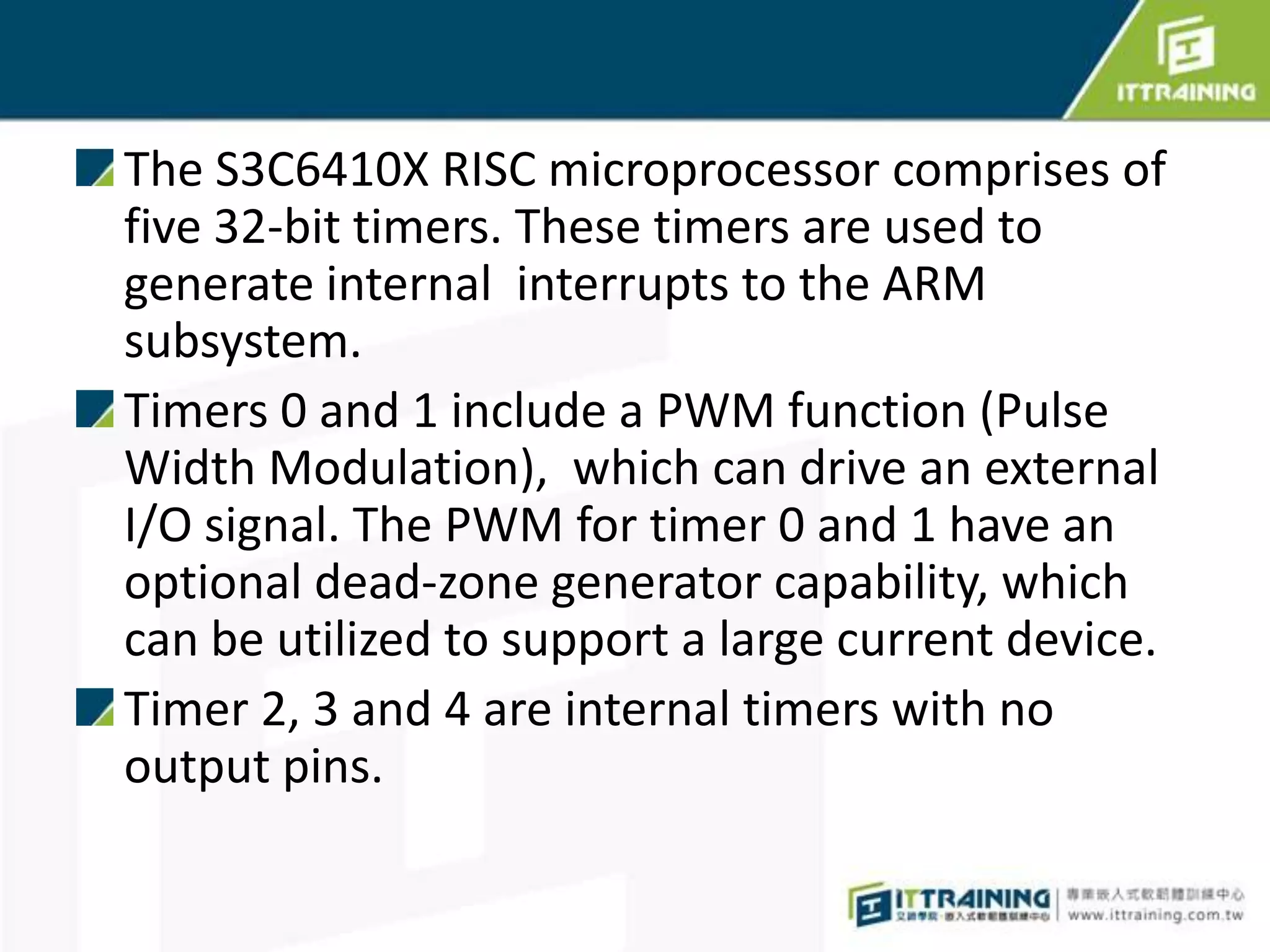
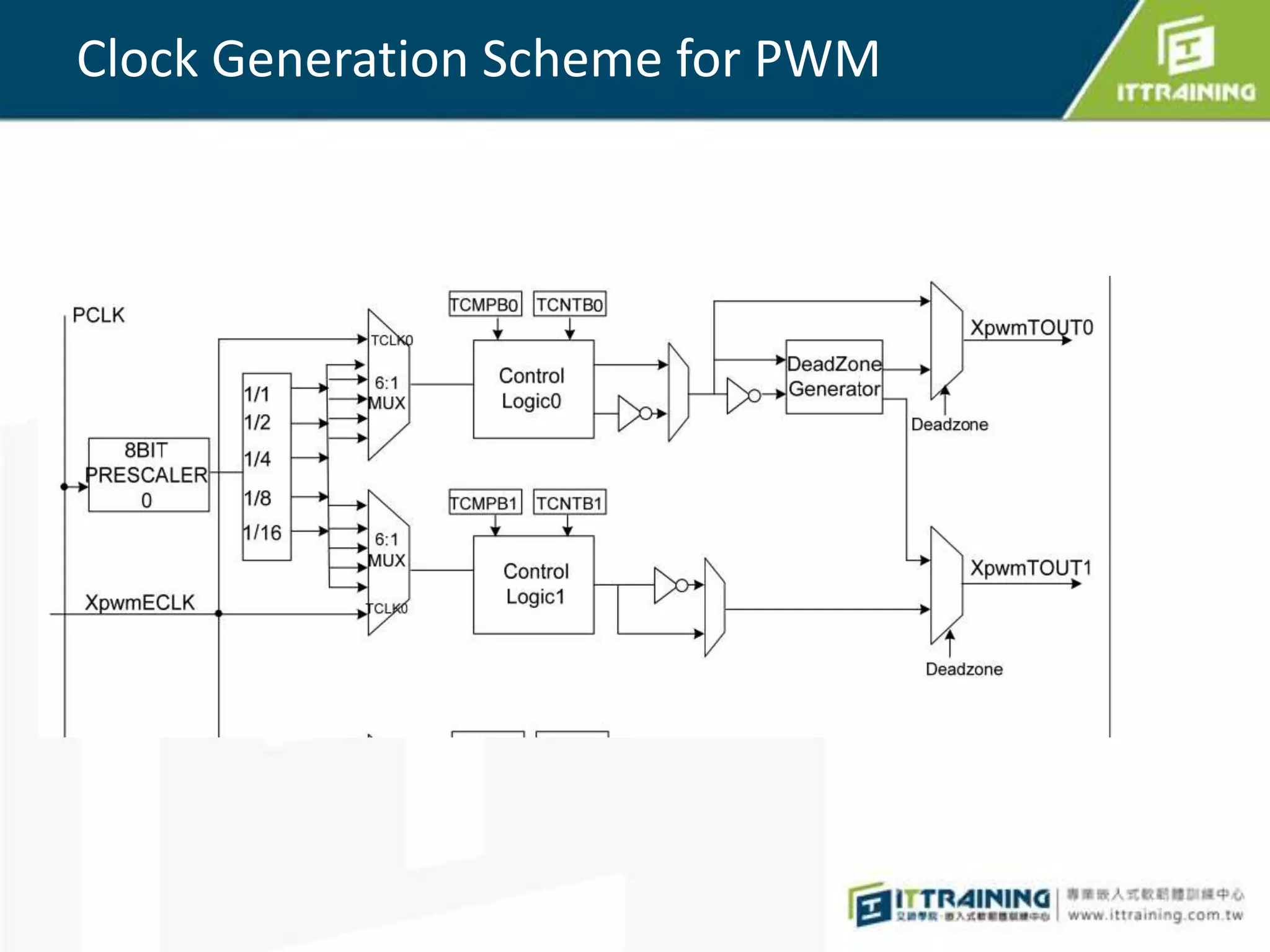
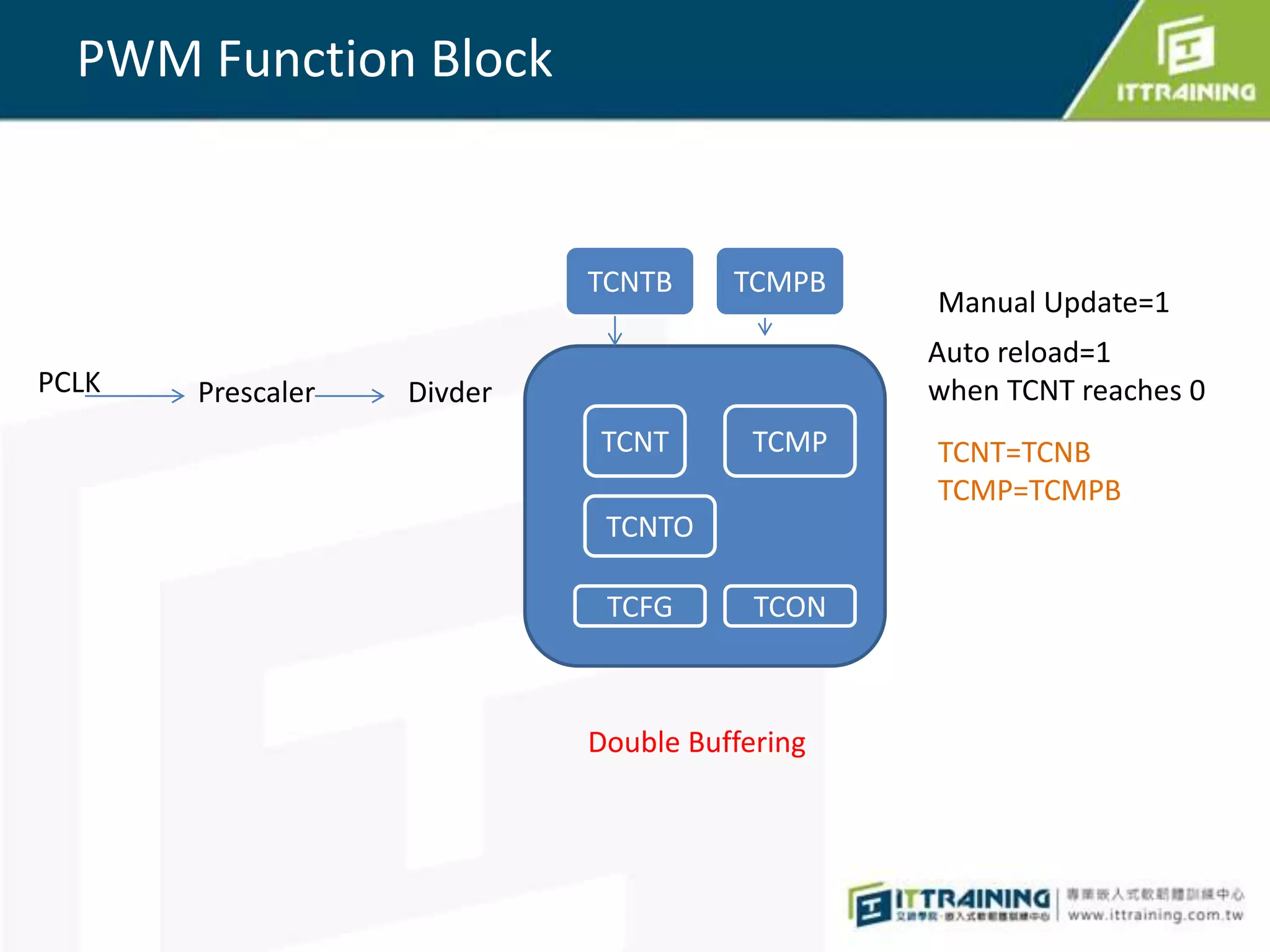
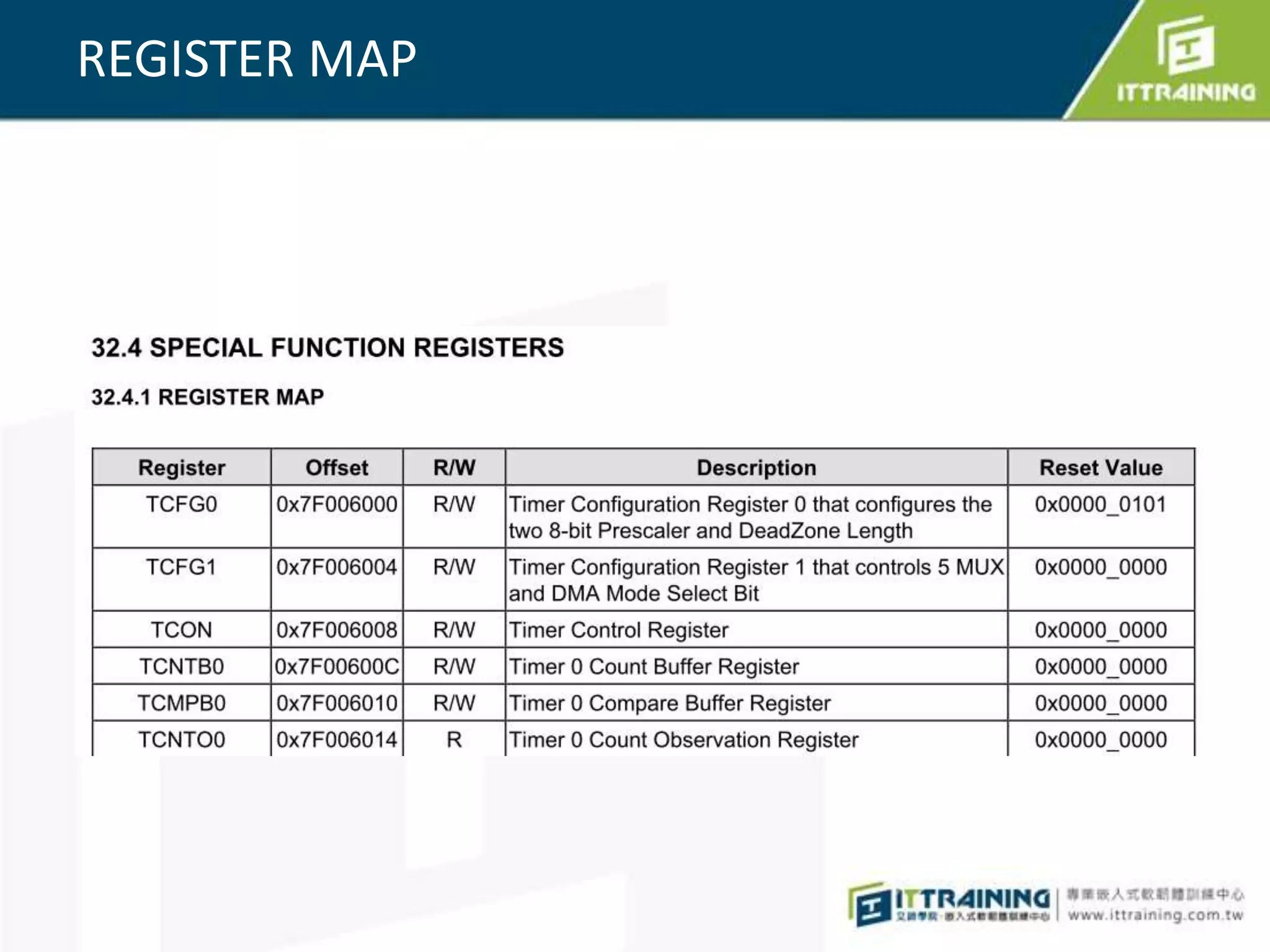
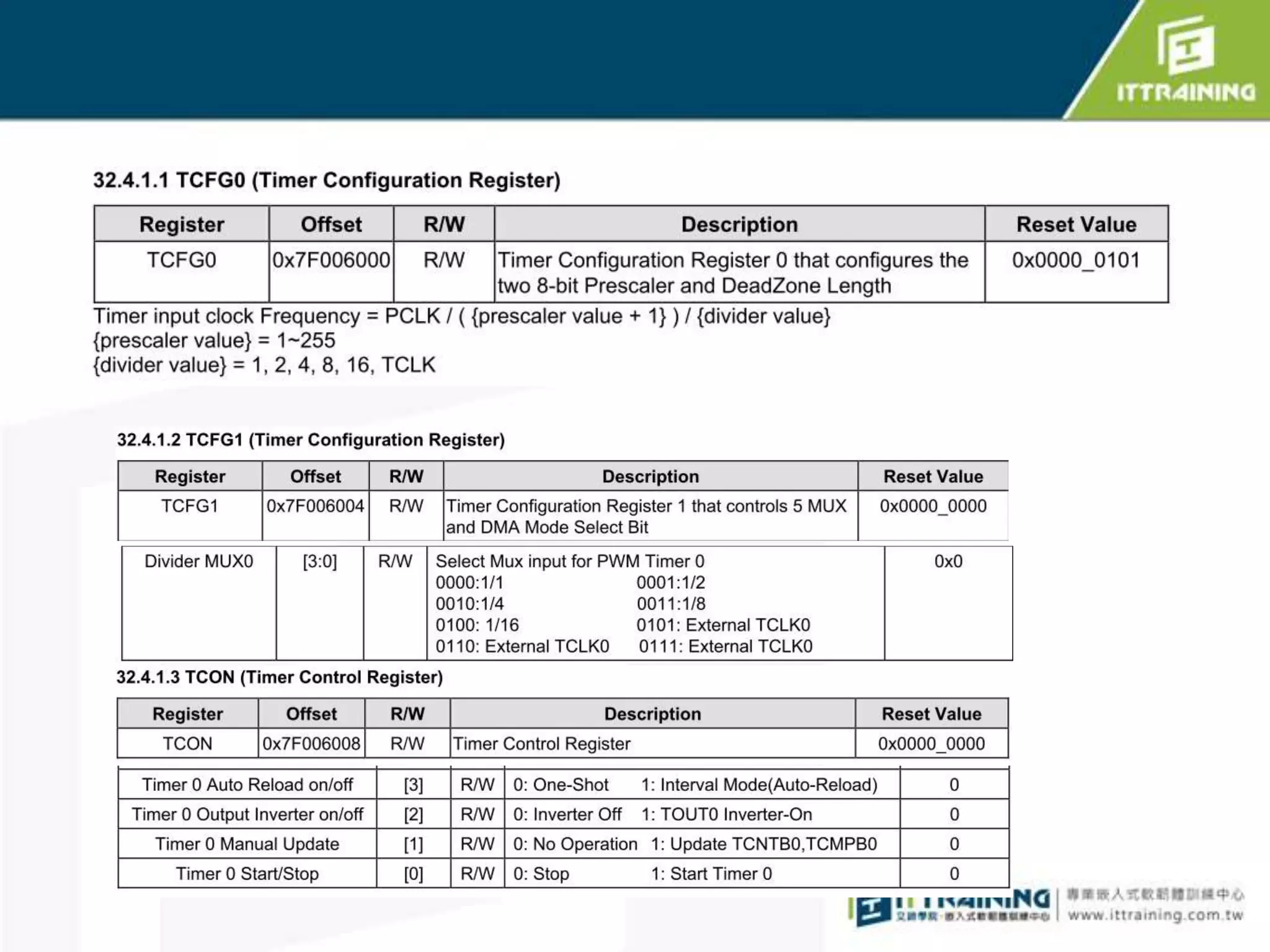
Description of the S3C6410X RISC microprocessor's timers supporting PWM functions for controlling external signals, including block diagrams of PWM setup.
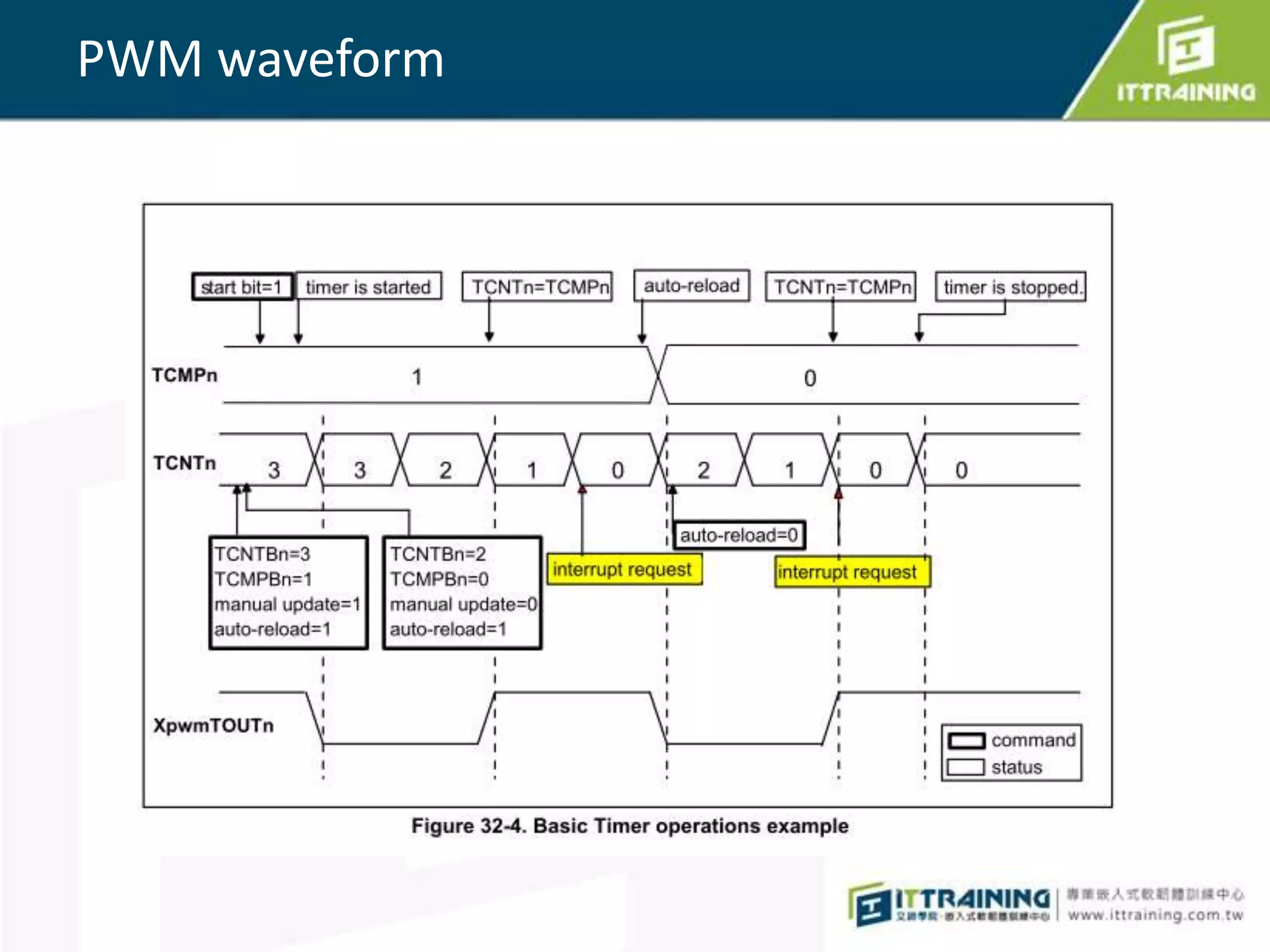
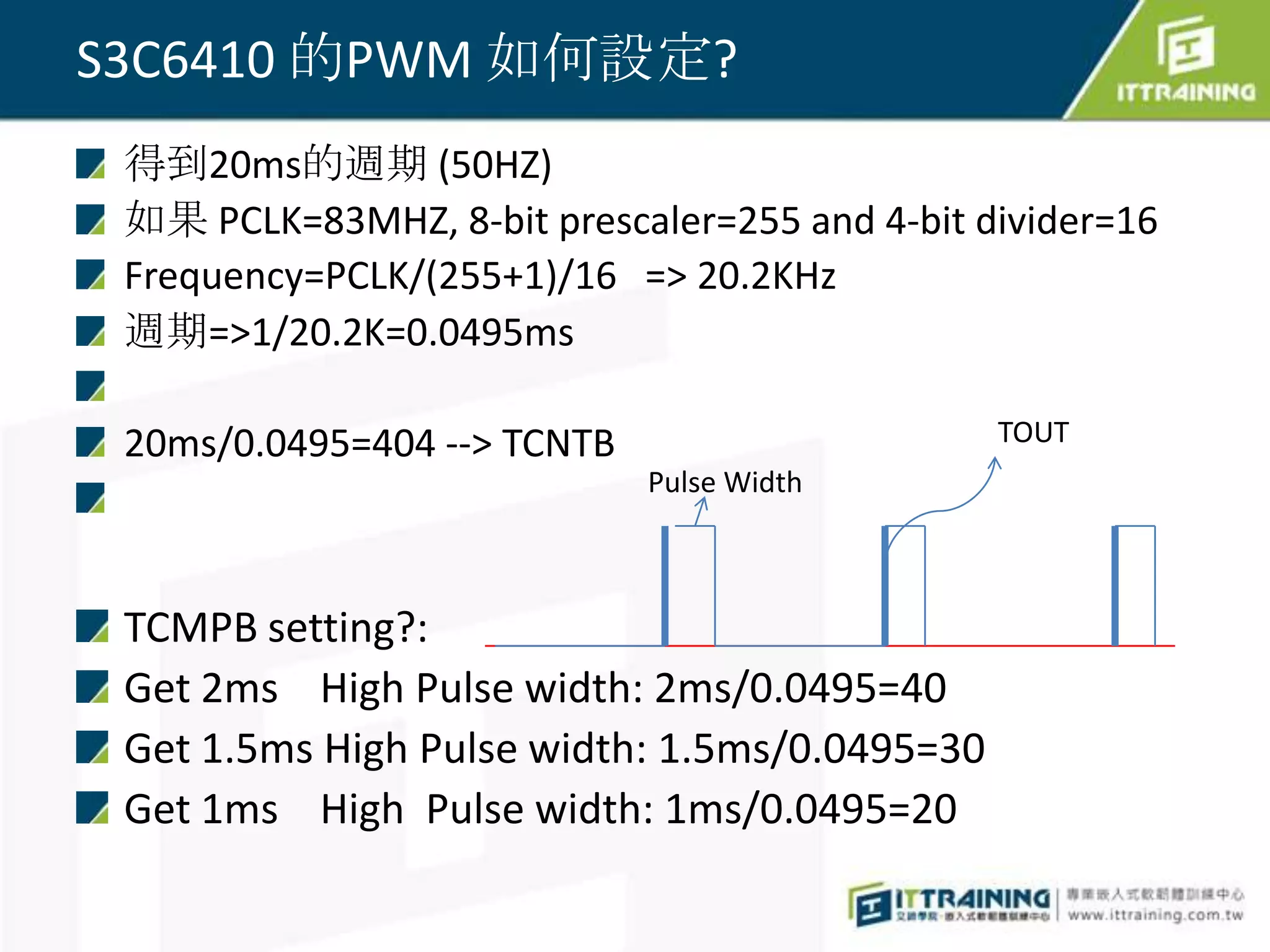
Illustration of the PWM waveform; settings to achieve specific pulse widths and frequencies from PCLK, detailing how to calculate pulse parameters.
Illustration of the PWM waveform; settings to achieve specific pulse widths and frequencies from PCLK, detailing how to calculate pulse parameters.
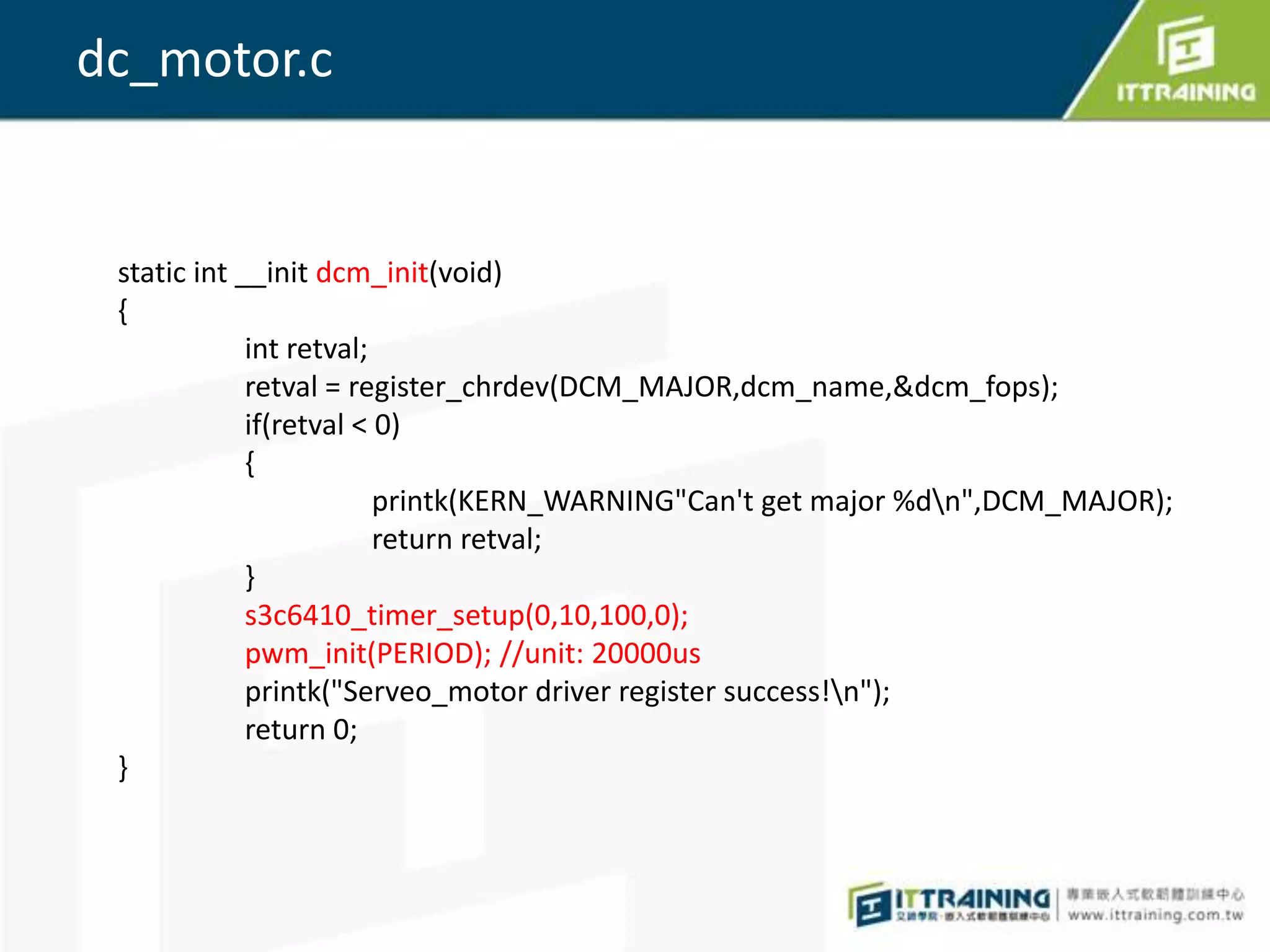
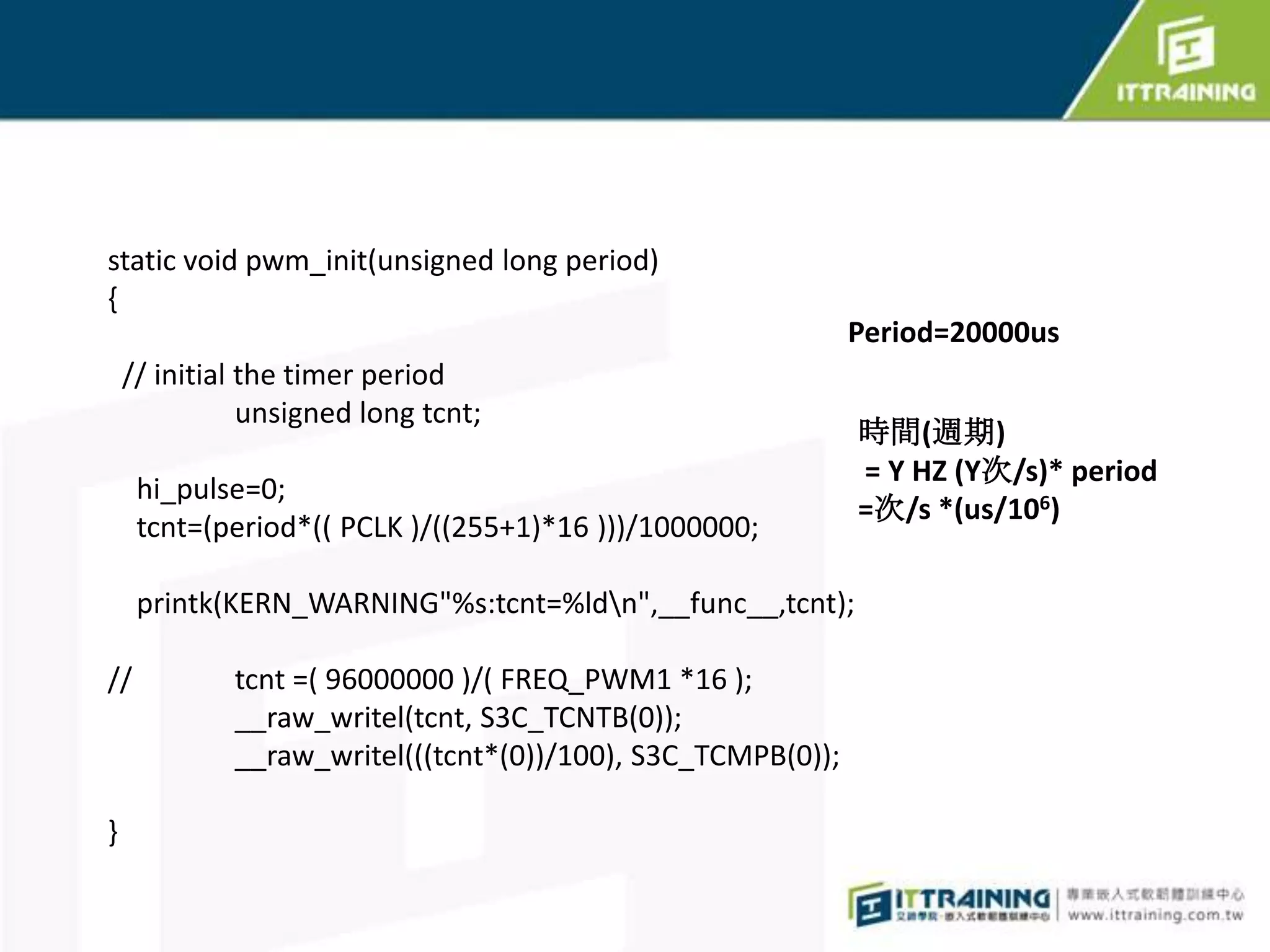
C code for initializing the DC motor driver in Linux, with details on setting timer periods and pulse width for effective control.
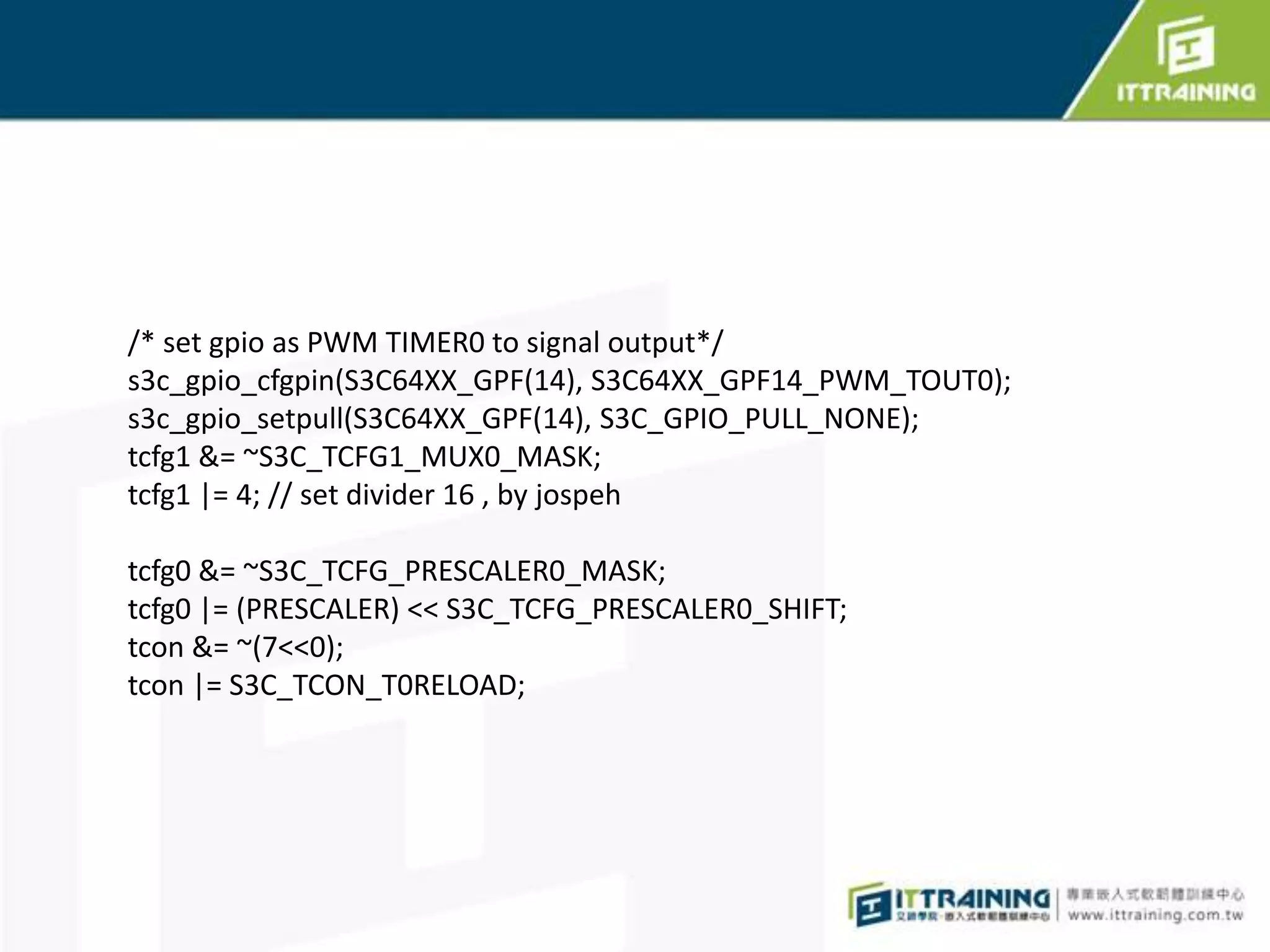
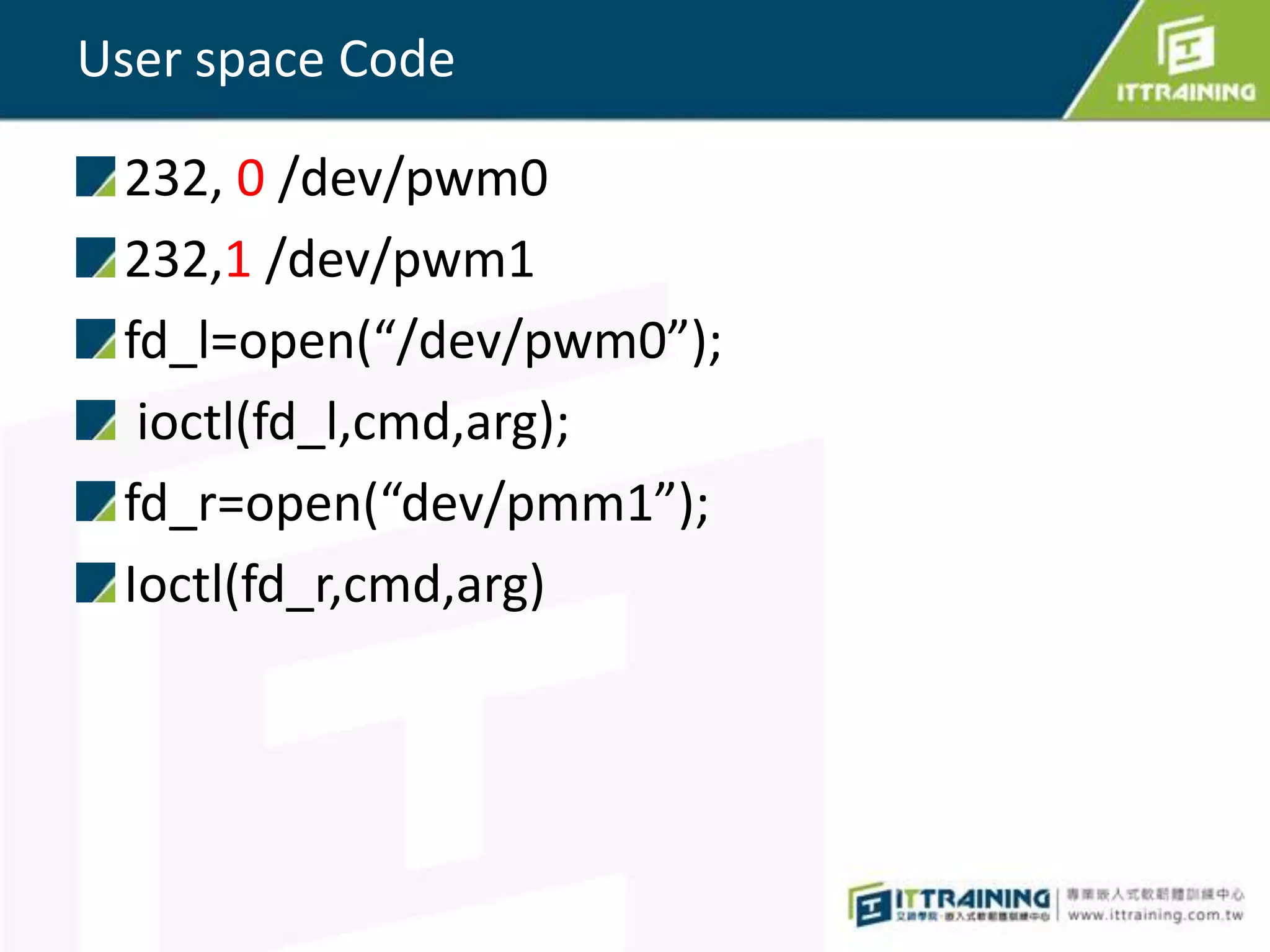
Explanation of function to configure PWM timers, GPIO setups for outputs, and sample user space code for interacting with the PWM device.