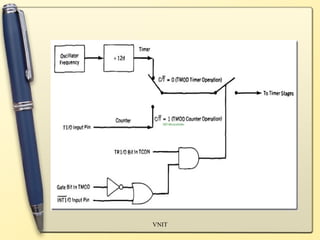
The document discusses different approaches to using timers/counters in 8051 microcontrollers. It describes software-based, hardware-based, and combined approaches. It provides details on registers used for timers like TH0, TL0, TMOD, and TCON. It explains how to use these registers to initialize and control timers, and provides examples of generating square waves using timers.