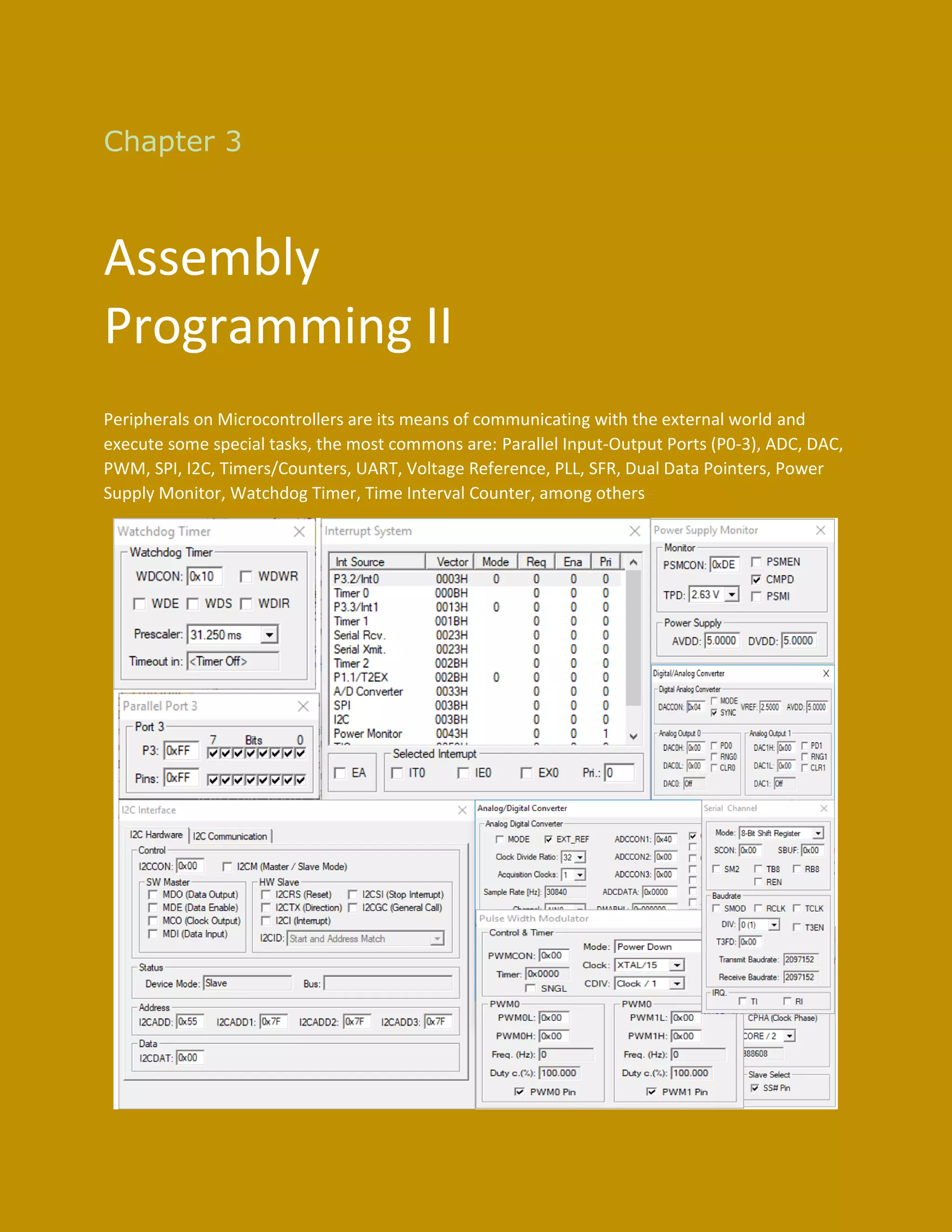
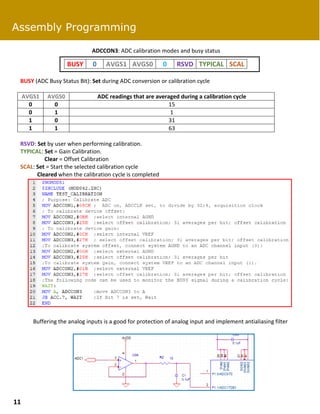
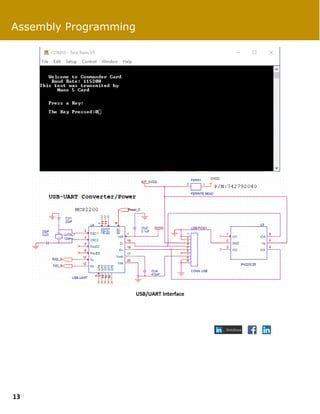
The document discusses various peripherals on microcontrollers including parallel I/O ports (P0-3), timers/counters, DAC, ADC, PWM, UART. It provides details on how each peripheral works, the registers used to control them, and examples of using timers/counters and DAC to generate waveforms.
























































![Share 'speed control_of_dc_motor_using_microcontroller.pptx'[1][1]](https://cdn.slidesharecdn.com/ss_thumbnails/sharespeedcontrolofdcmotorusingmicrocontroller-181012151950-thumbnail.jpg?width=640&height=640&fit=bounds)



















