Downloaded 149 times


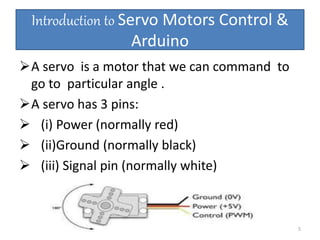
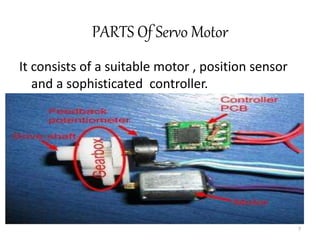
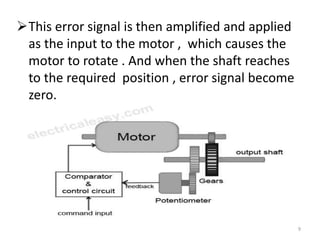



This document discusses controlling servo motors using an Arduino board. It defines servo motors as motors that can be commanded to precise angular positions between 0 and 180 degrees. It explains that servo motors have three pins - power, ground, and a signal pin to which an angle command is sent. The Arduino language has built-in support for controlling servos. The document outlines the key parts of a servo motor and its working principle, which involves sensing the shaft position and comparing it to the commanded position to minimize error. Controlling servos with Arduino provides benefits like continuous duty, reversibility, and efficient position control.