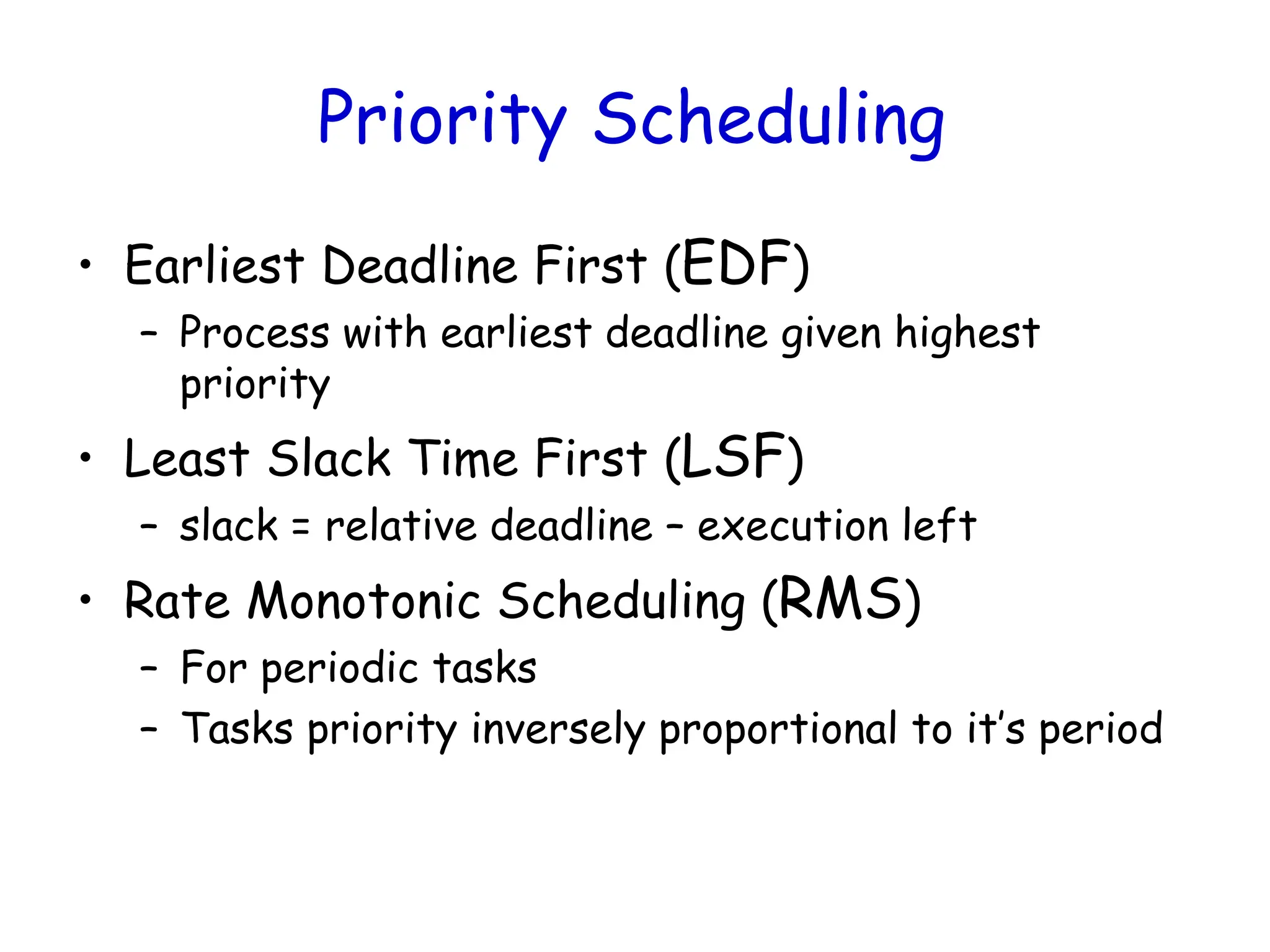
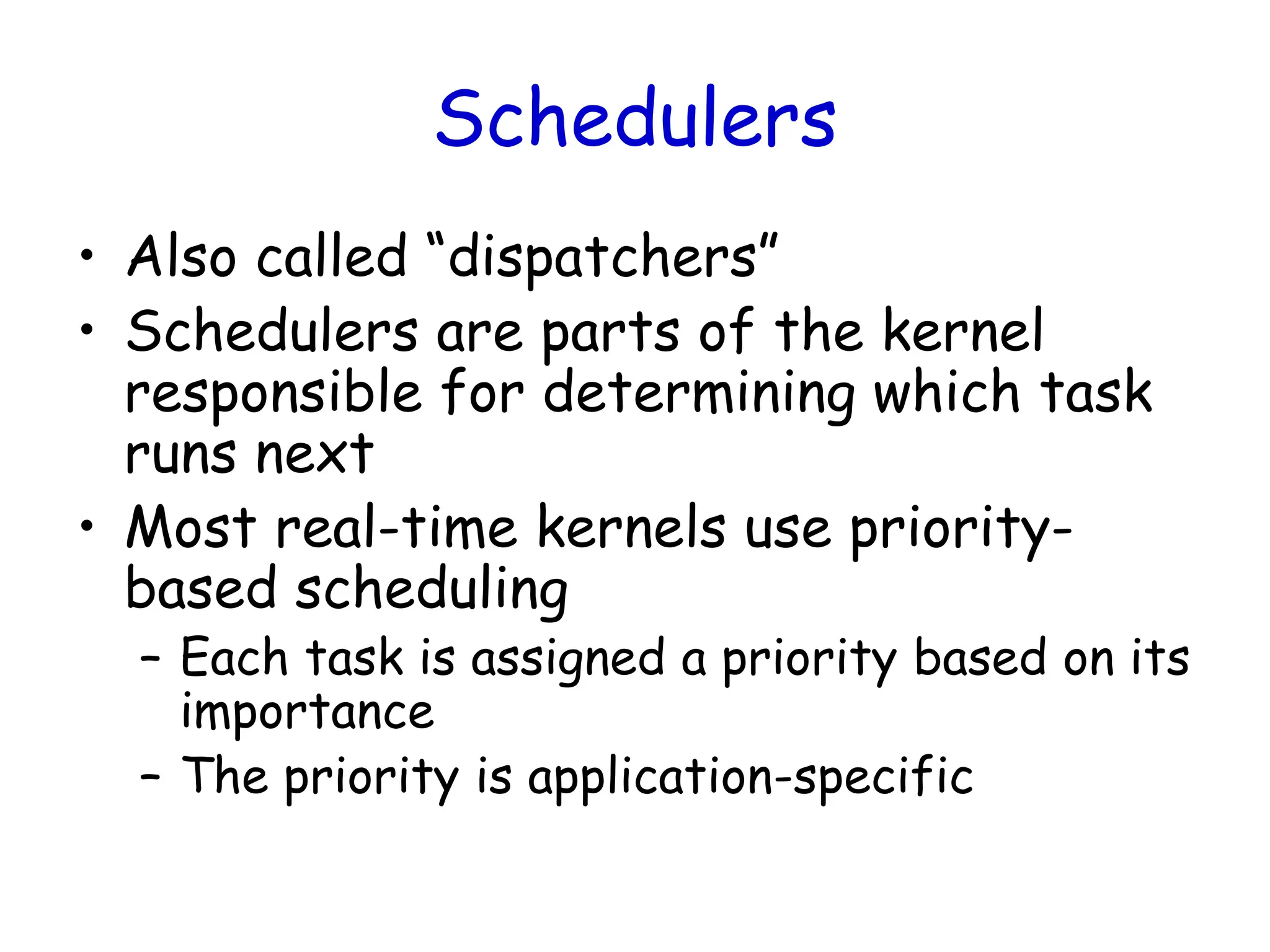
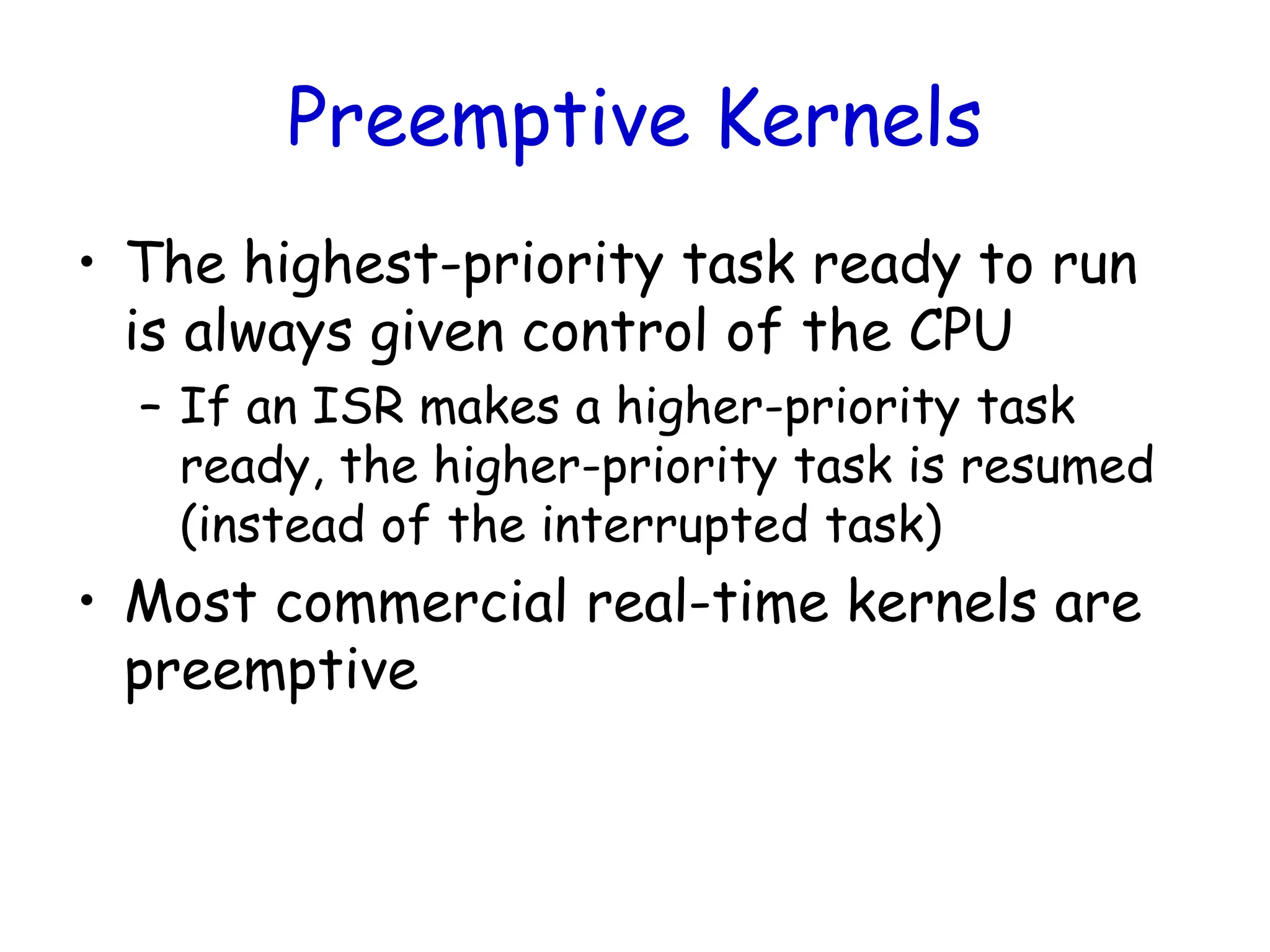
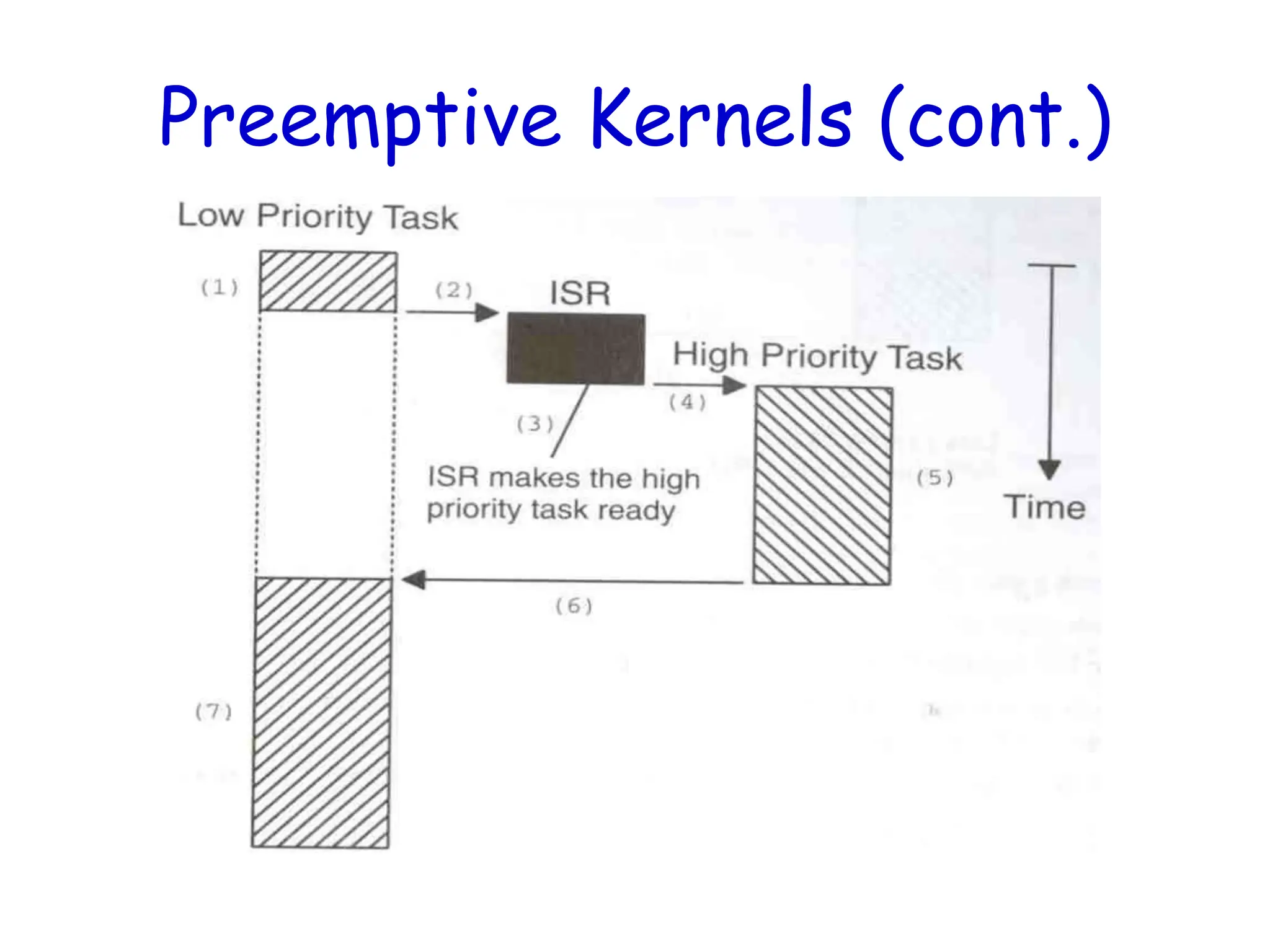
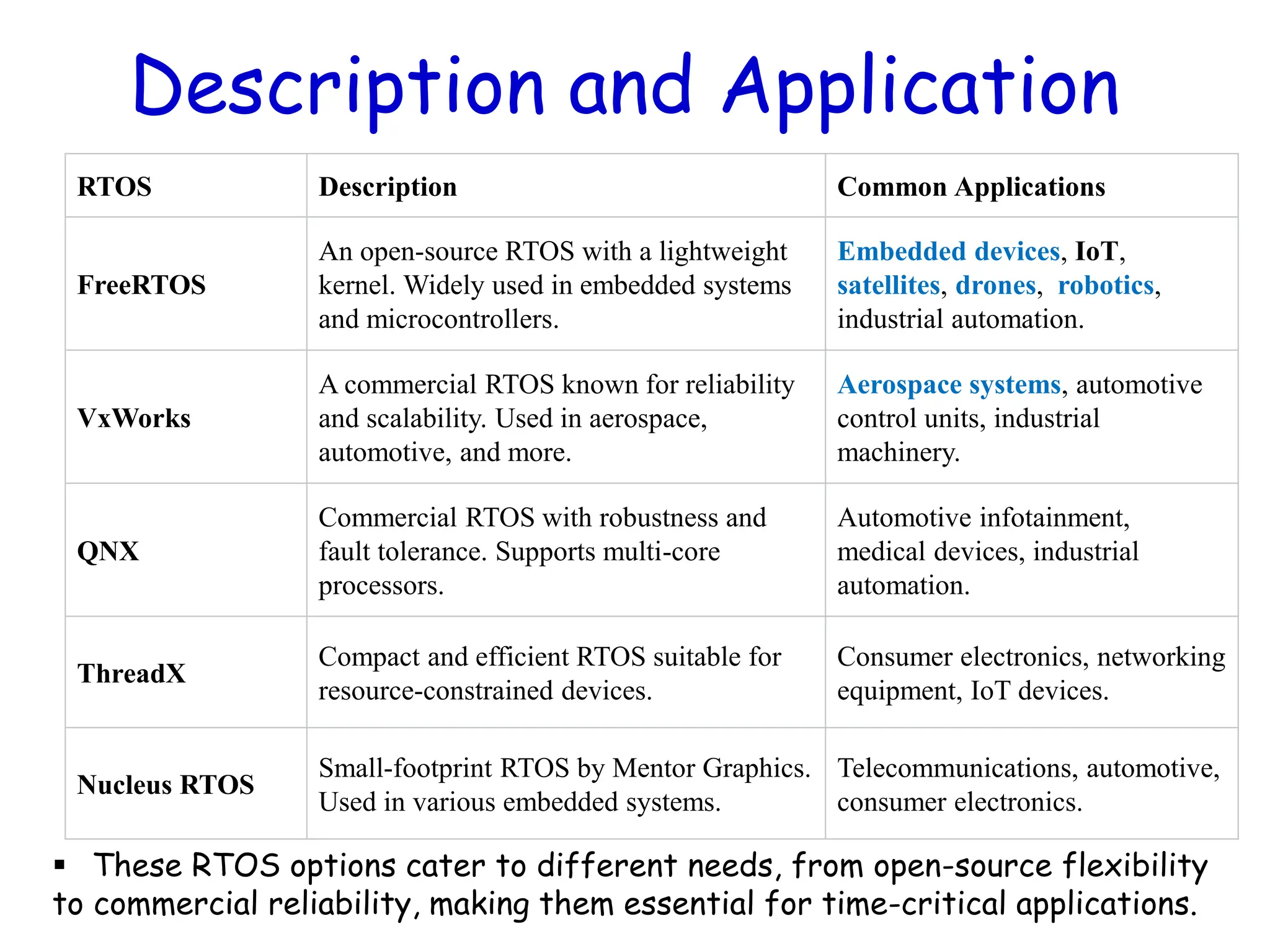
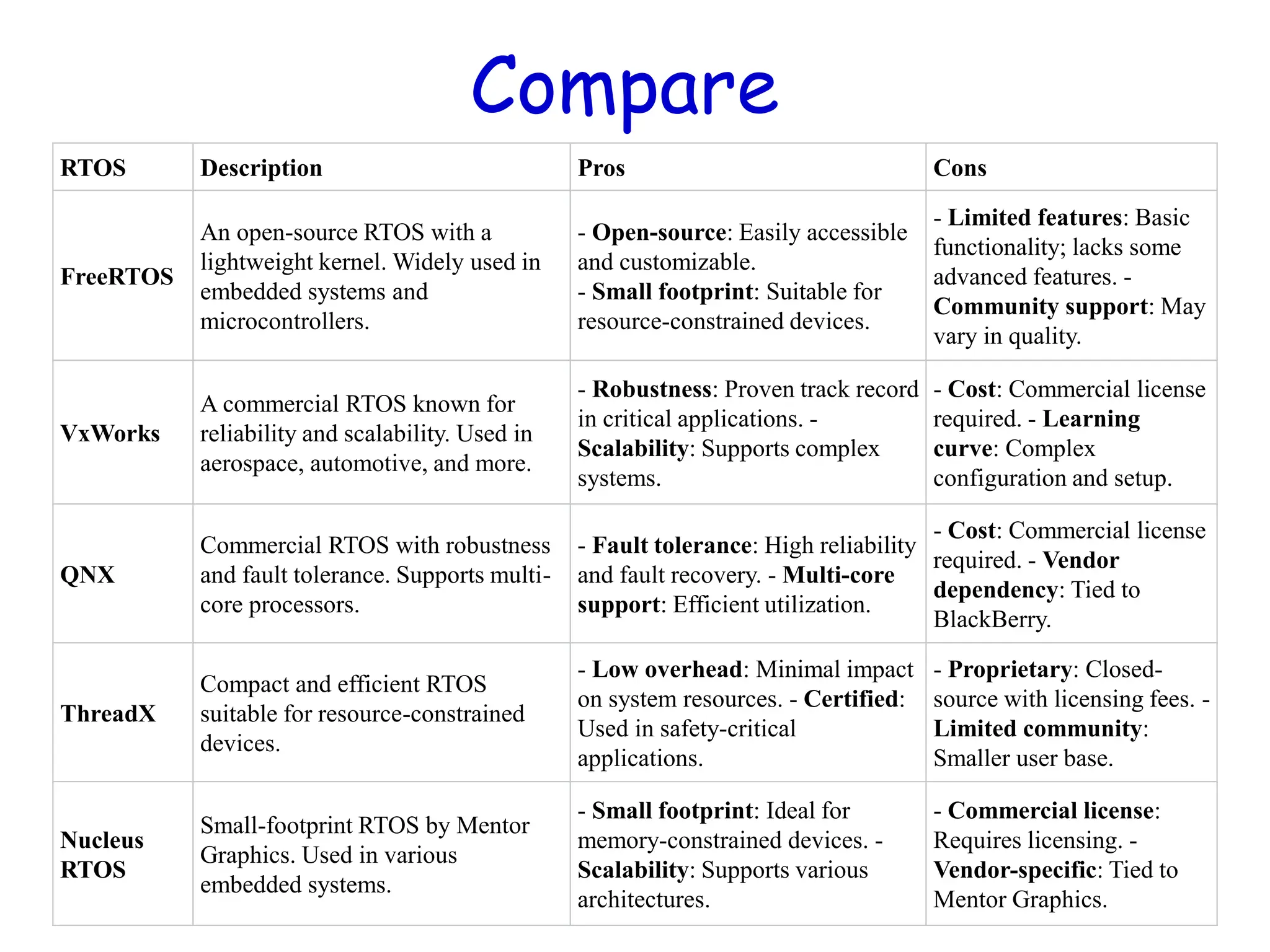
The document discusses real-time operating systems (RTOS) used in embedded systems, distinguishing between hard and soft real-time systems based on deadline enforcement. It outlines scheduling algorithms, resource allocation, and common features of RTOS, alongside comparisons of various RTOS like FreeRTOS, VxWorks, QNX, ThreadX, and Micrium μC/OS. Each RTOS is evaluated based on its characteristics, applications, advantages, and disadvantages in specific industry contexts.