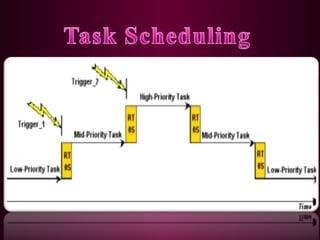
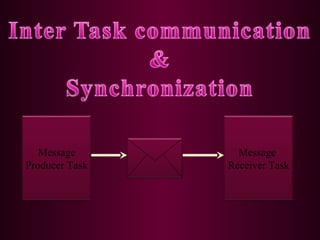
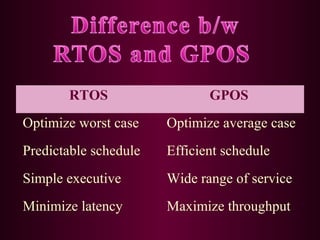
The presentation on real-time operating systems (RTOS) covers definitions, types, kernel functions, and applications in various fields. Key features include priority-based preemptive scheduling, where tasks with higher priority are executed first, and the role of dynamic memory allocation in inter-task communication. RTOS are utilized in diverse systems such as automotive controls, flight systems, and telecommunications, with future designs incorporating field programmable gate arrays for enhanced performance.