Download to read offline
![23 class AlarmElevator : public Elevator {
public
24 AlarmElevator ( int top_floor)
25 Elevator (top_floor)
26 {alarm_on = 0;}
27 void set_alarm( )
28 {alarm_on = 1;}
29 void reset_alarm( )
30 {alarm_on = 0;}
31 void go (int floor)
32 { if (!alarm_on)
33 Elevator :: go (floor)
};
protected:
int alarm_on;
} ;
34 main( int argc, char **argv) {
Elevator *e_ptr;
35 If (argv[1])
36 e_ptr = new Elevator (10);
else
37 e_ptr = new AlarmElevator (10);
38 e_ptr - > go(5);
39 c_out << “n currently on floor :” << e_ptr -> which_floor ( );
}](https://image.slidesharecdn.com/rseminarp-150301084852-conversion-gate01/75/Slicing-of-Object-Oriented-Programs-18-2048.jpg)
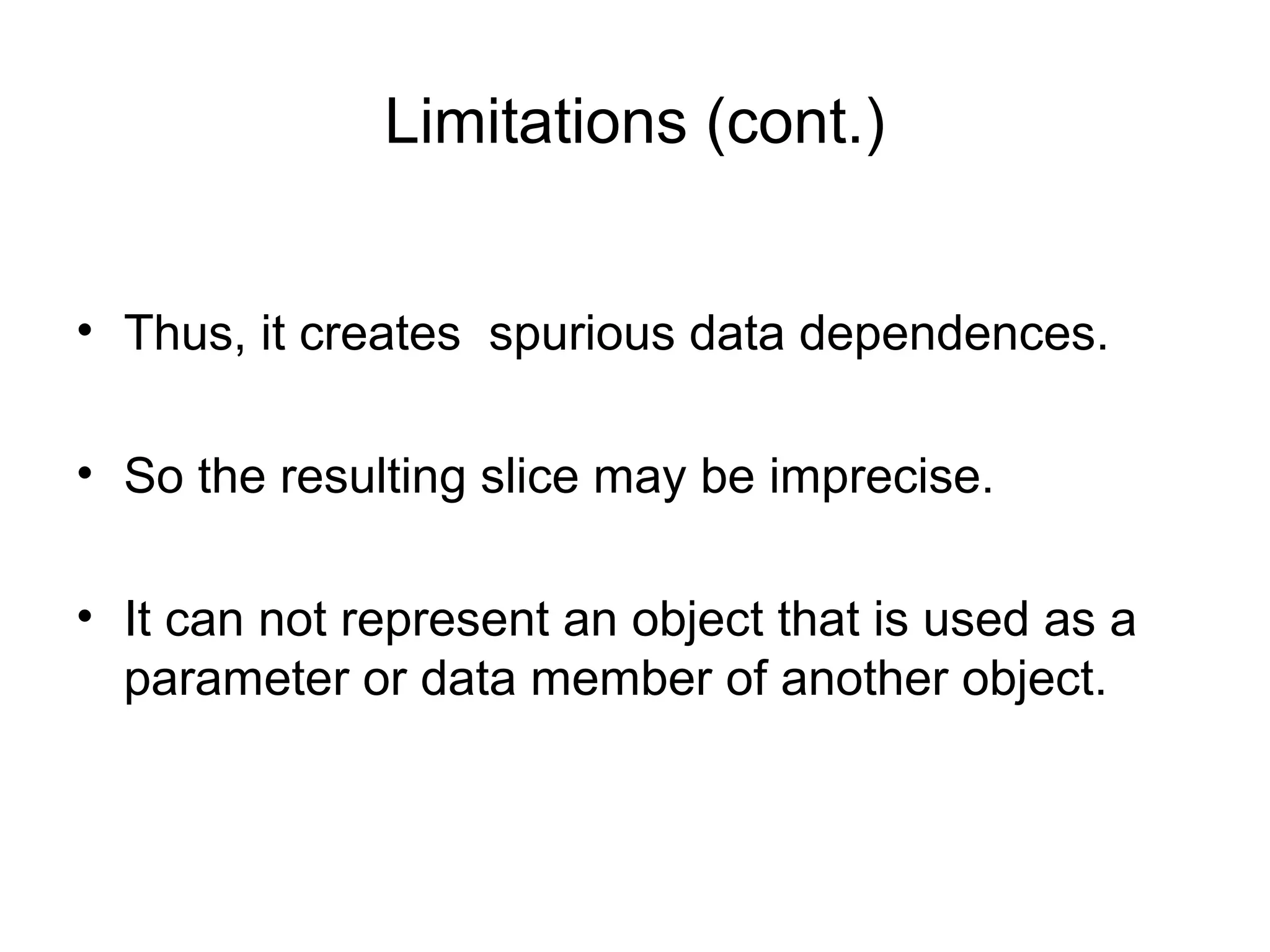
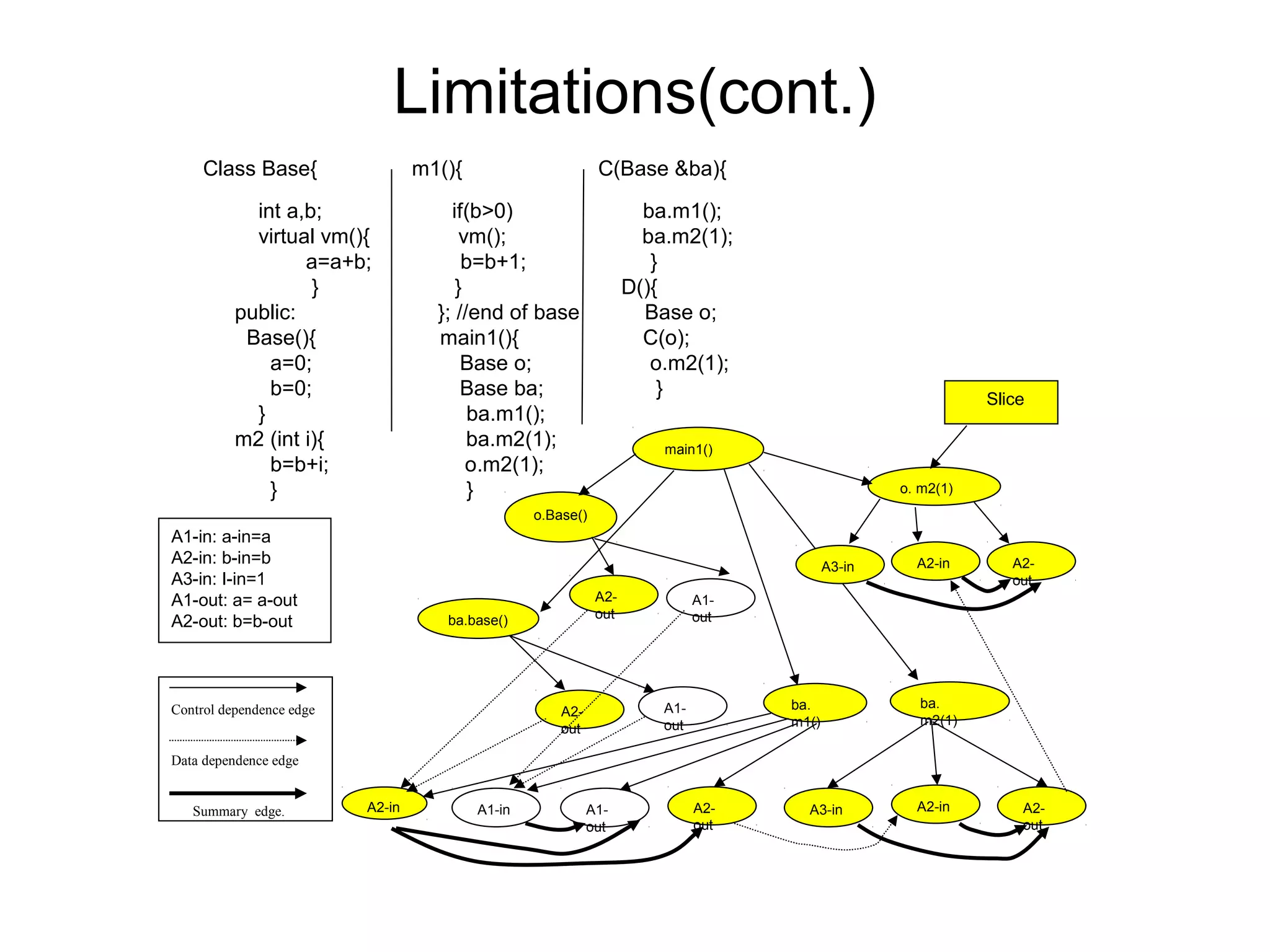
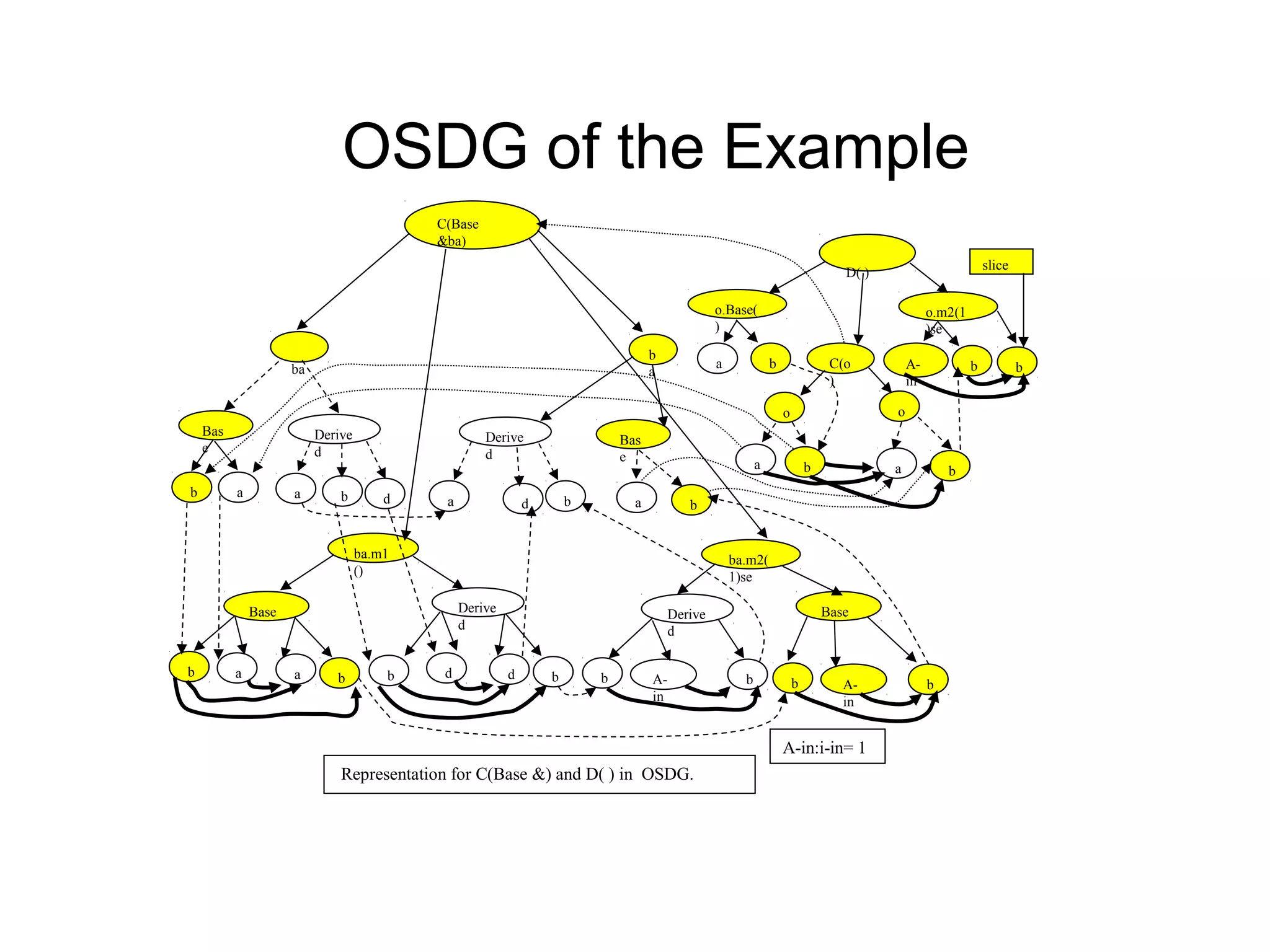

- The document summarizes techniques for slicing object-oriented programs. It discusses static and dynamic slicing, and limitations of previous approaches. - It proposes a new intermediate representation called the Object-Oriented System Dependence Graph (OSDG) to more precisely capture dependencies in object-oriented programs. The OSDG explicitly represents data members of objects. - An edge-marking algorithm is presented for efficiently performing dynamic slicing of object-oriented programs using the OSDG. This avoids recomputing the entire slice after each statement.