Download as PPSX, PPTX

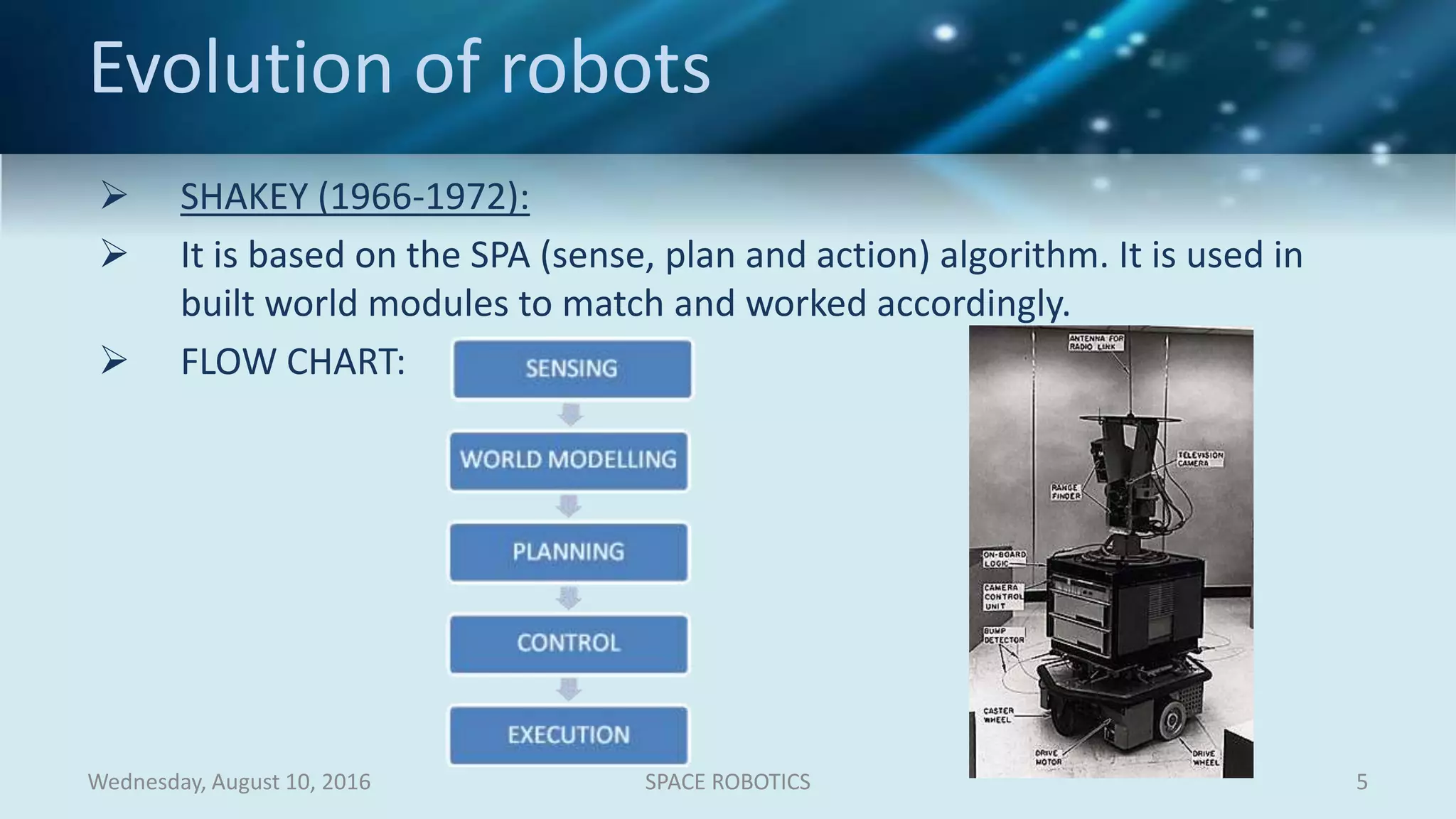
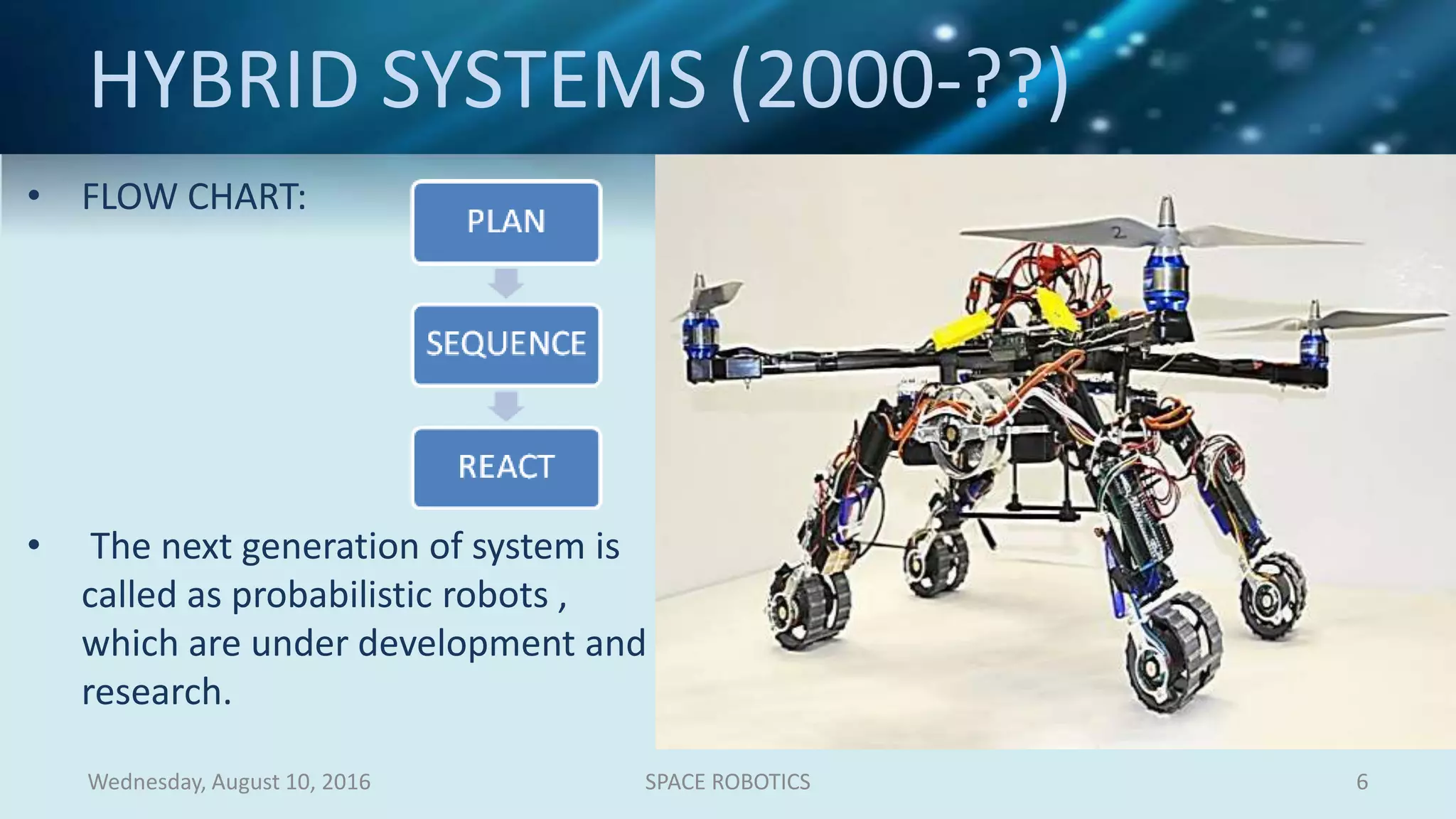
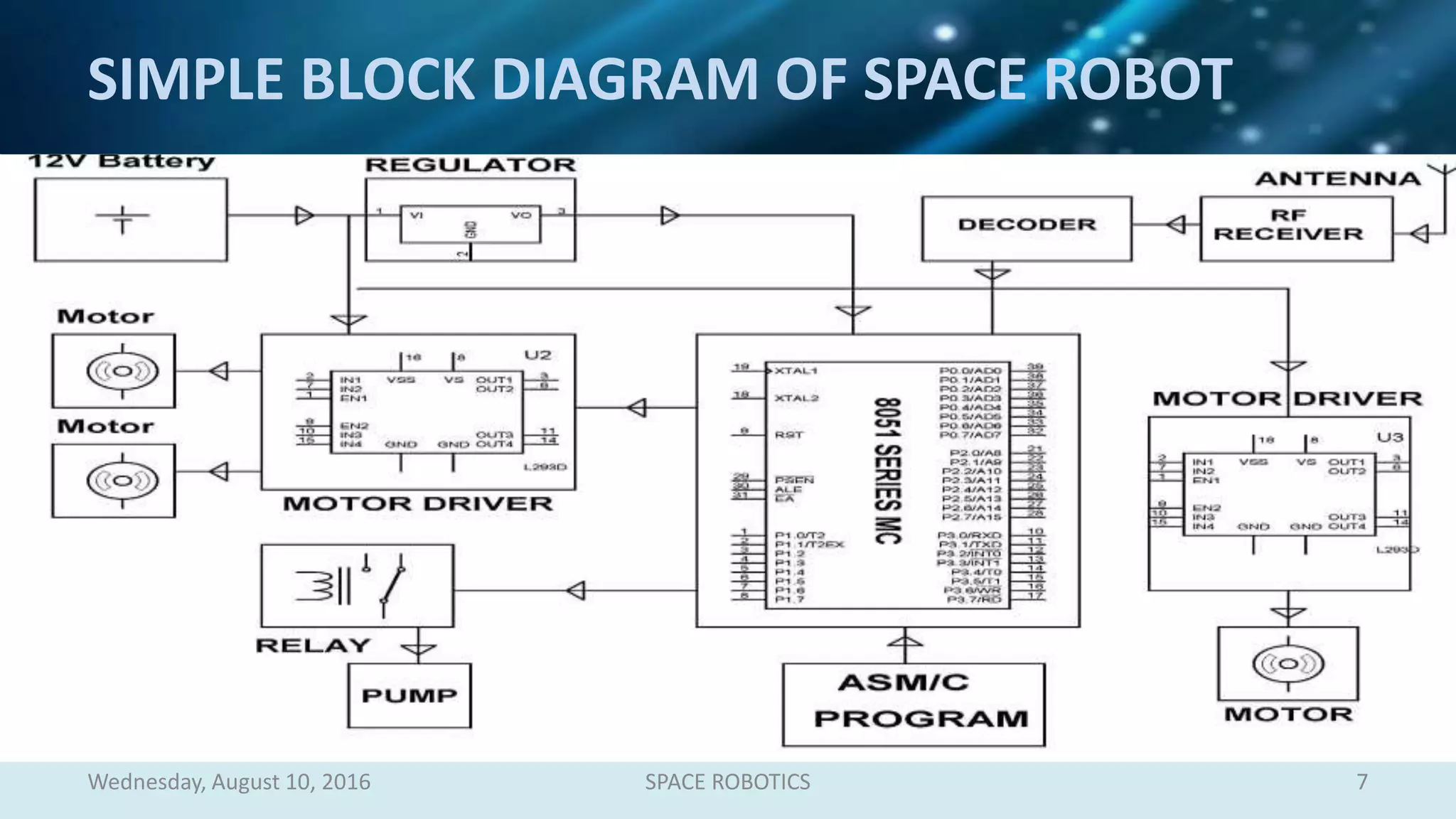
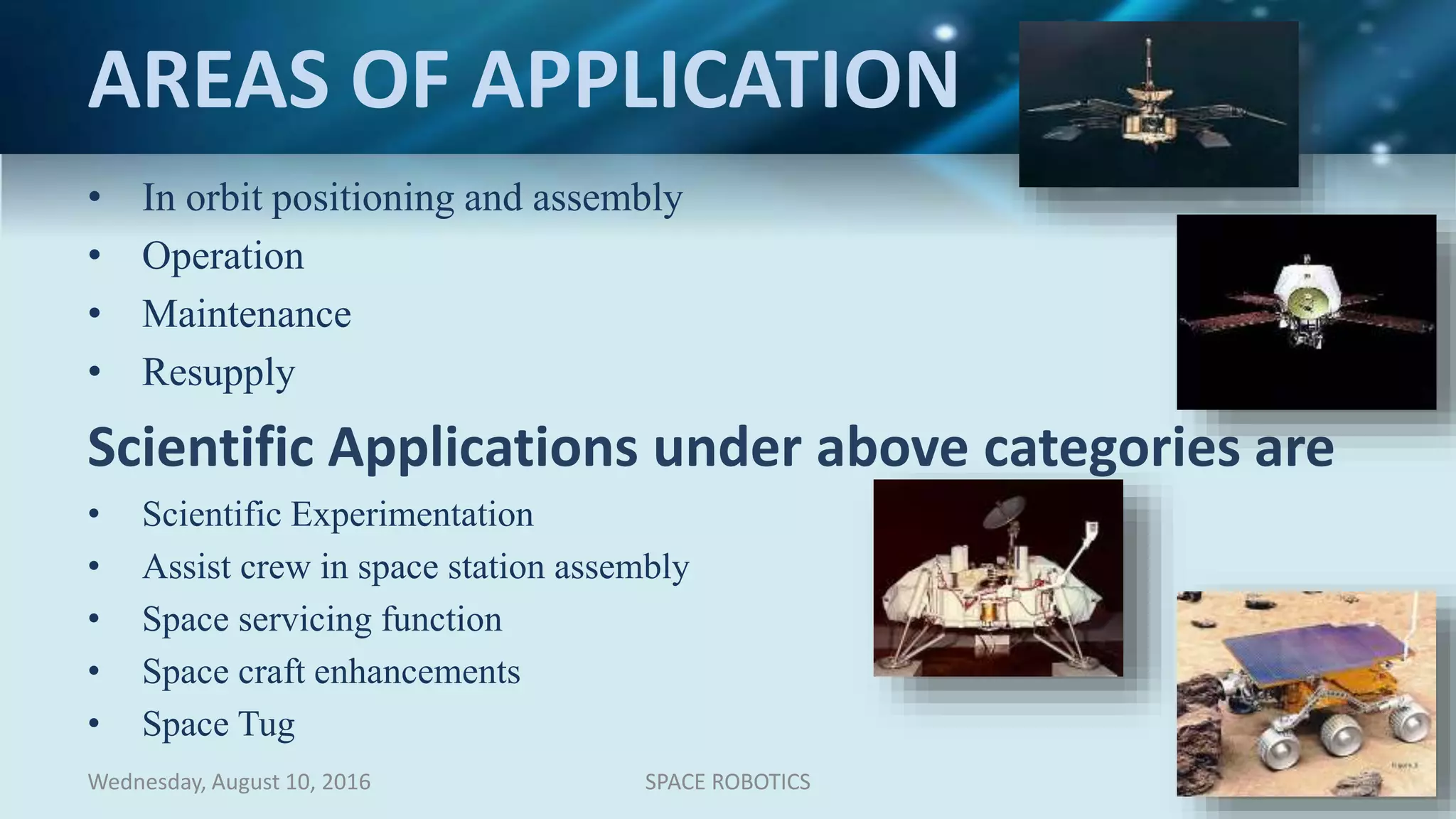
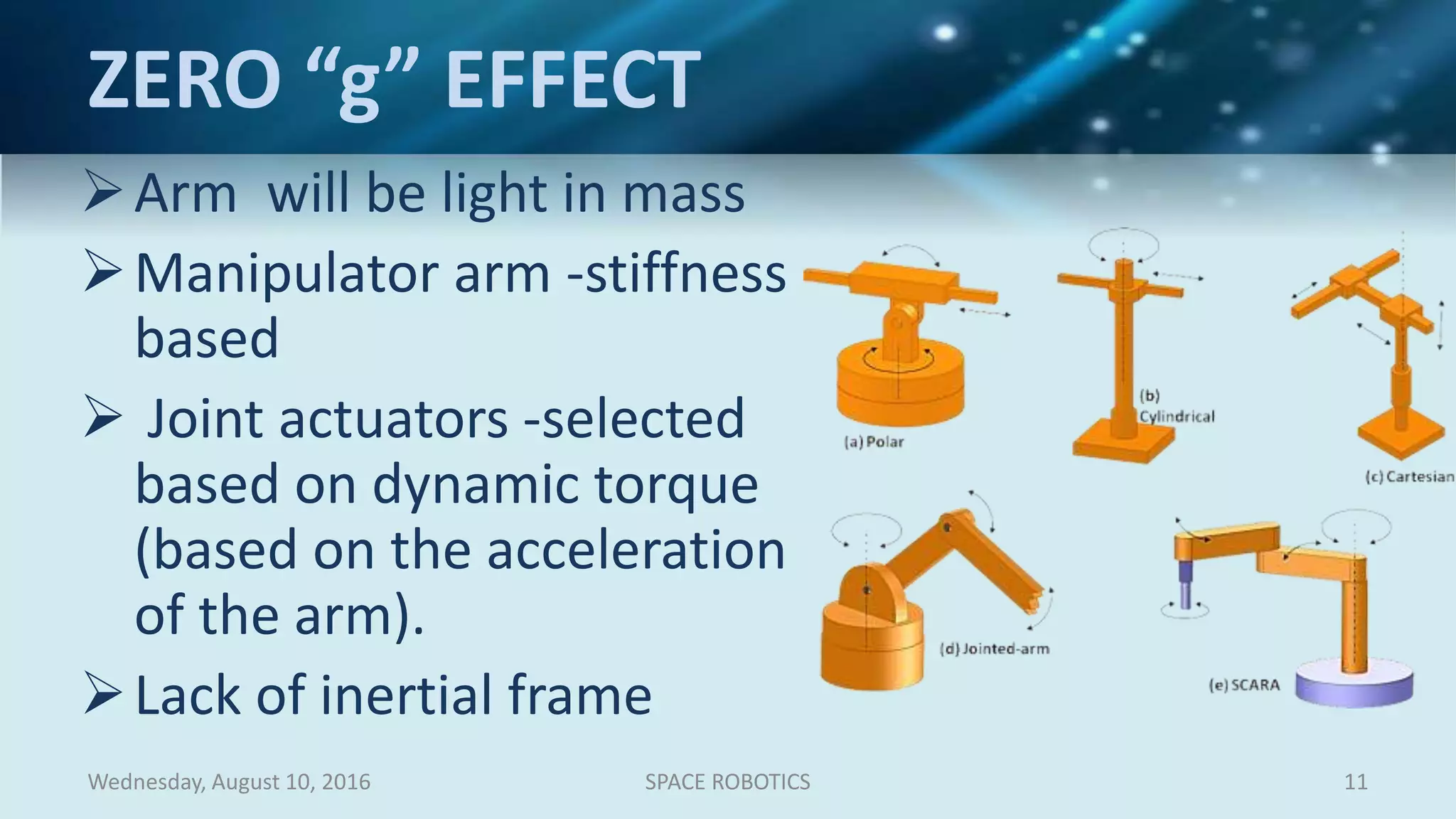
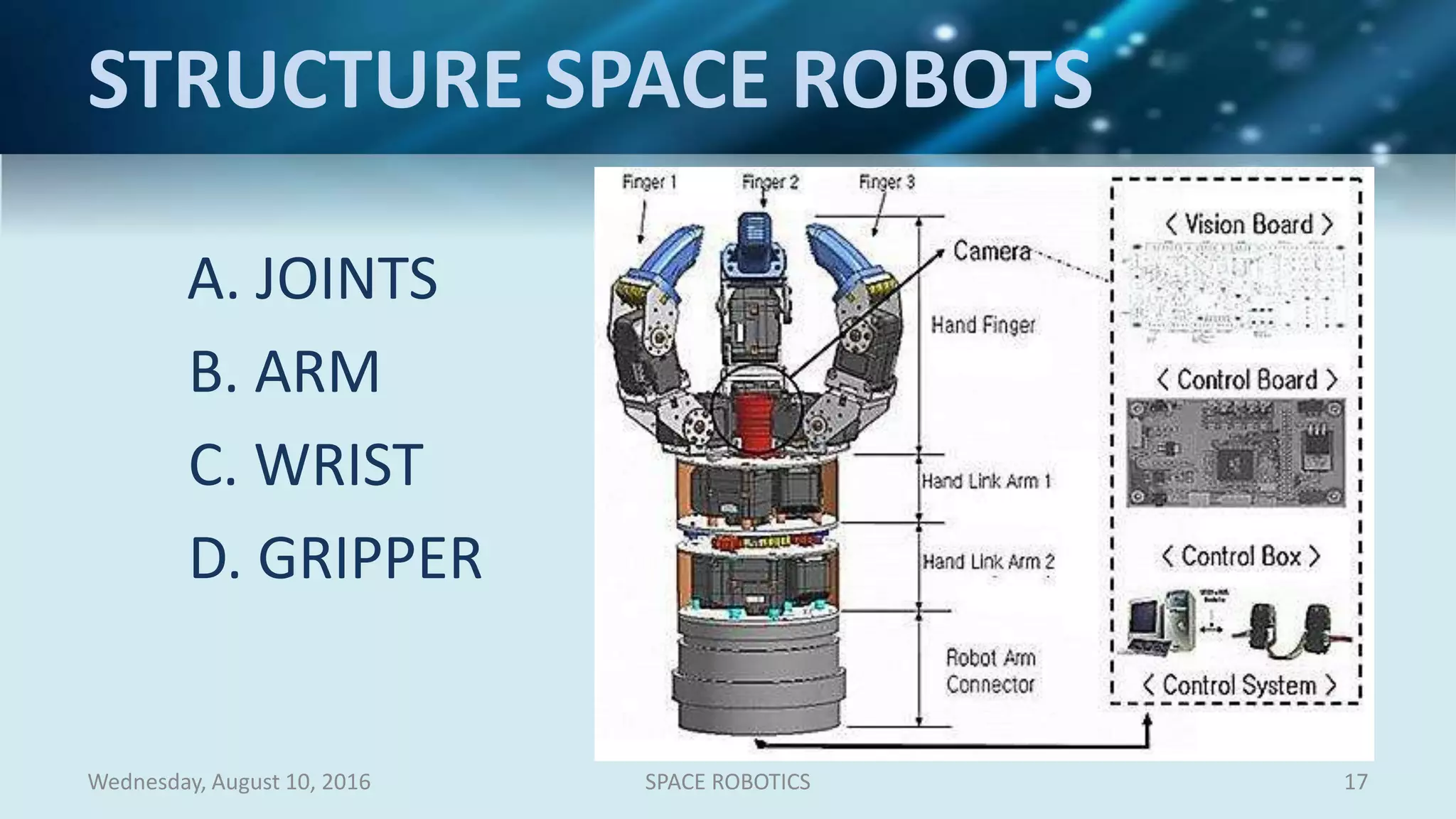
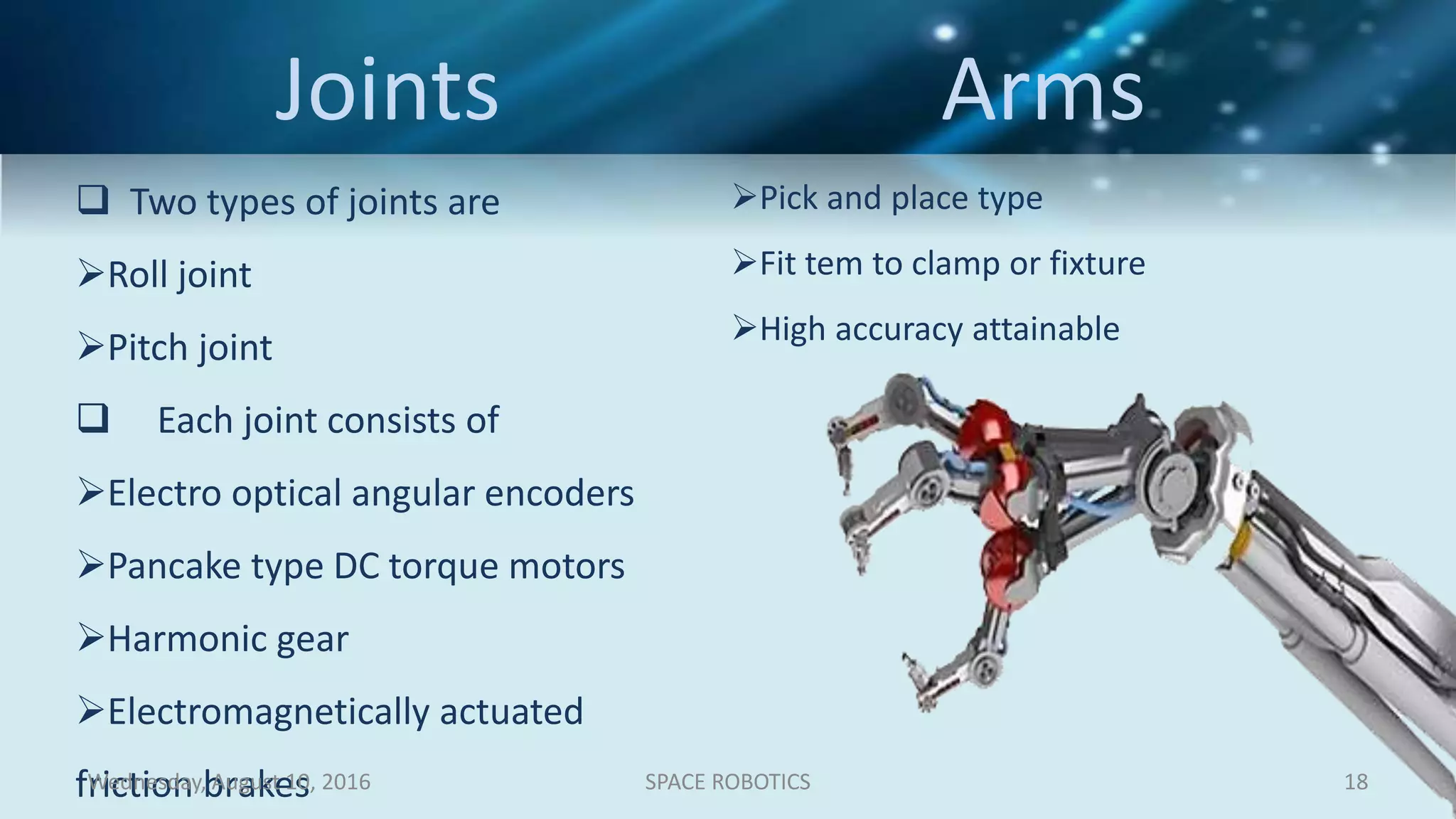
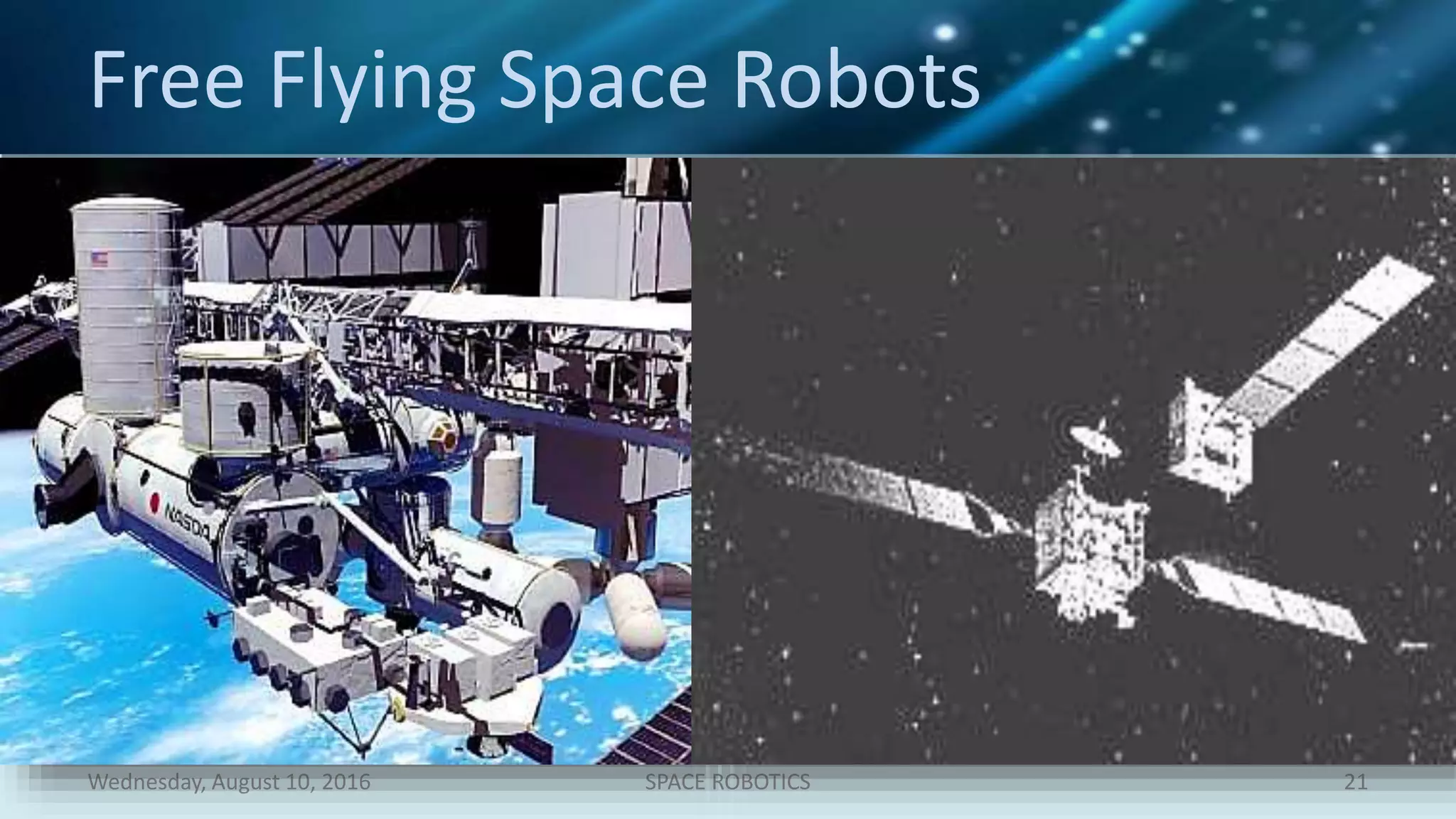
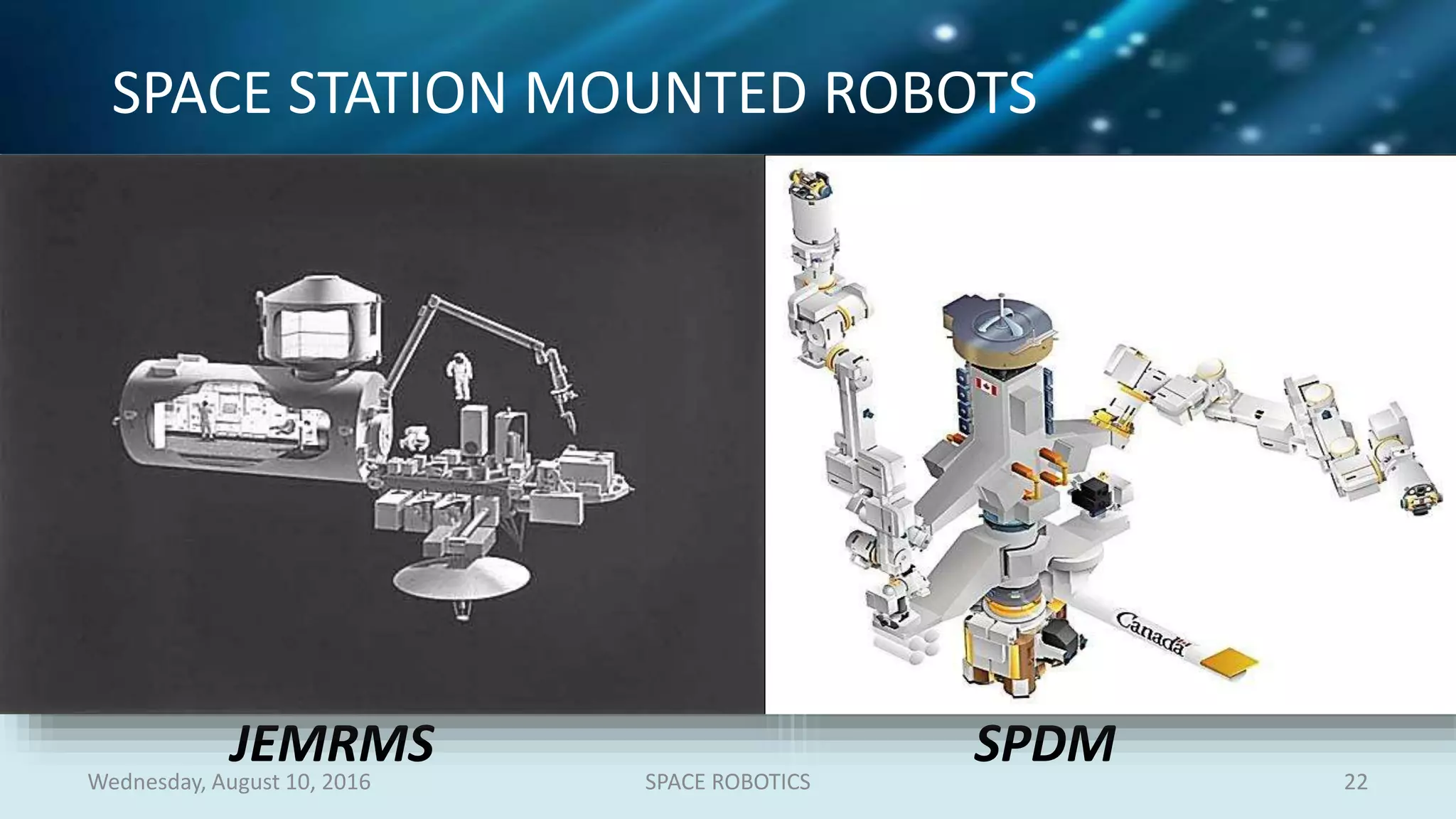
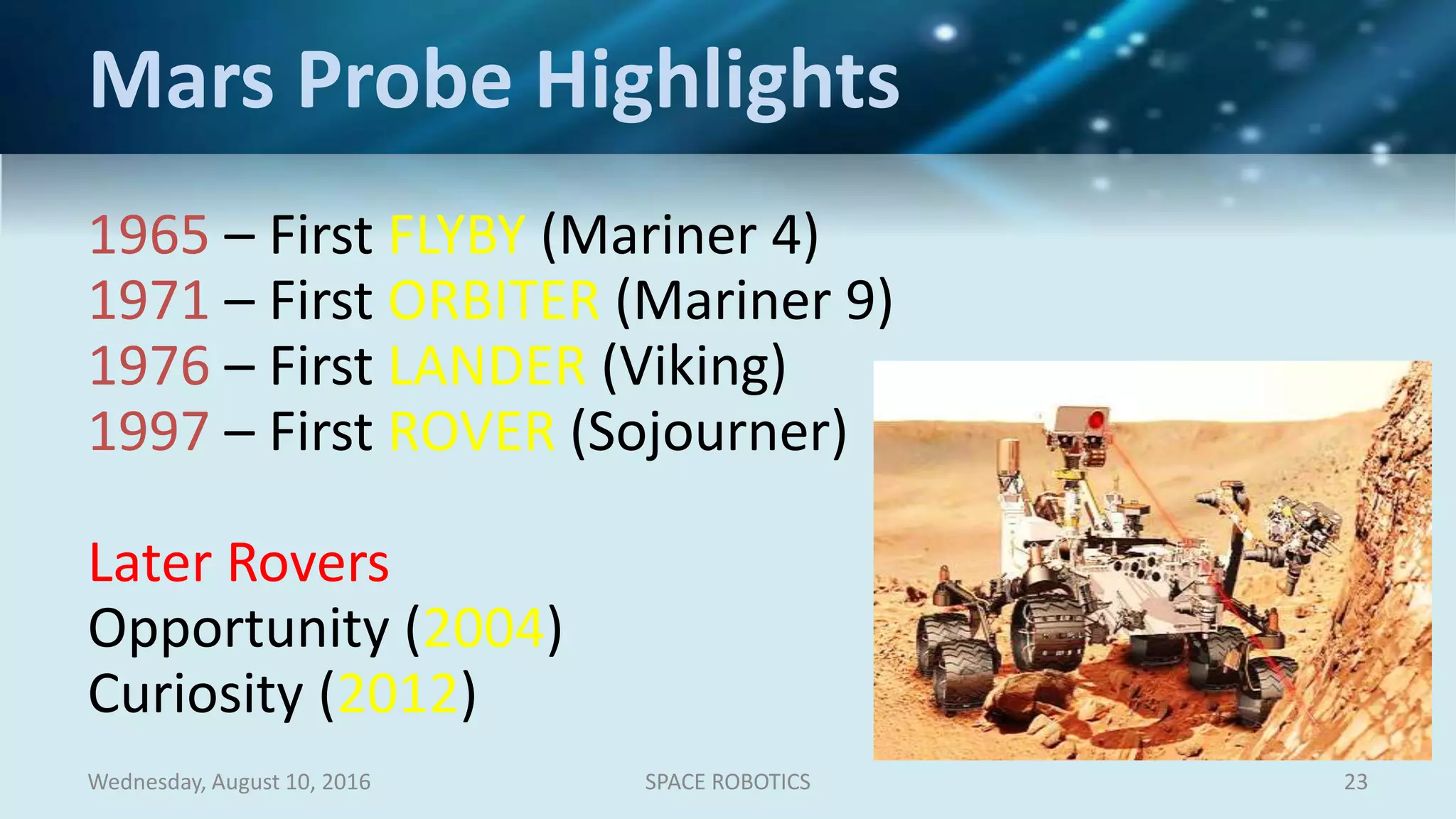
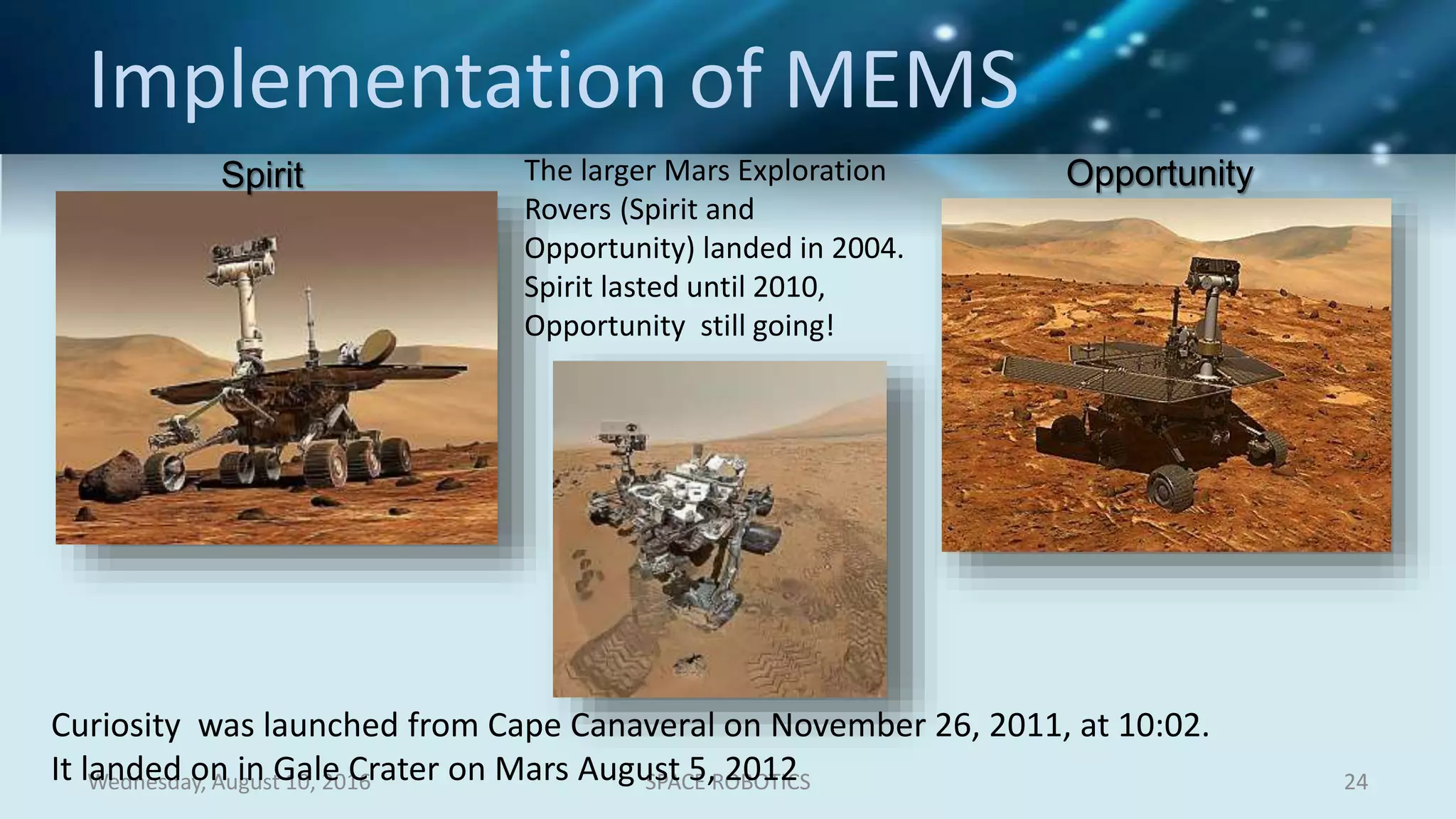
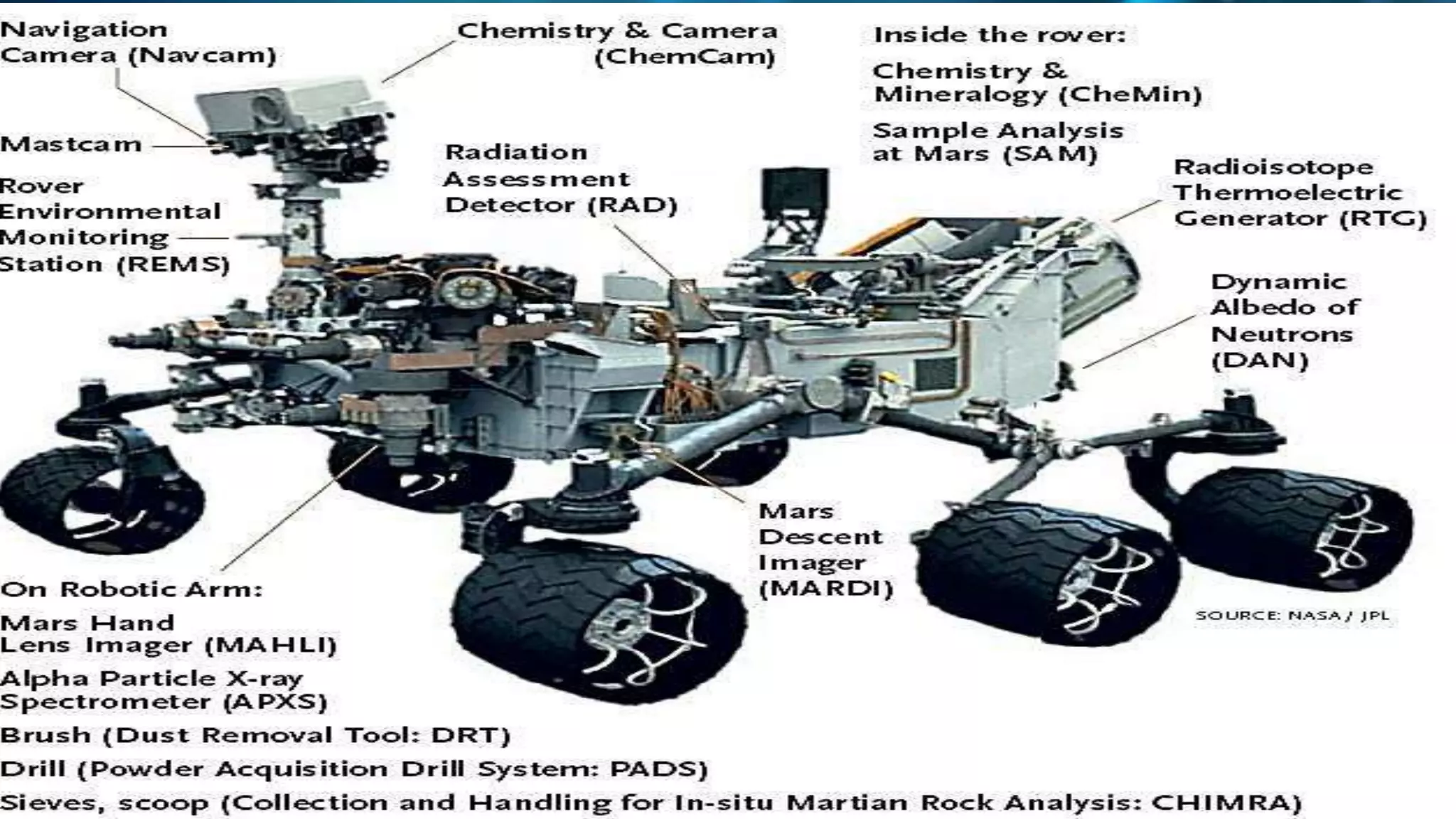



This document discusses a case study on the integration of microelectromechanical systems (MEMS) on Mars rovers. It first provides background on space robotics and discusses challenges in designing robots for space like withstanding zero gravity and thermal vacuums. It then examines the structures of space robots including their joints, arms, wrists, and grippers. Specific examples of space robots are described like the shuttle robot arm and rovers on Mars. The case study focuses on how MEMS have been implemented on later Mars rovers to help enable scientific exploration of the planet. In conclusion, robots have played a huge role in space research by performing dangerous tasks and making discoveries in place of humans.