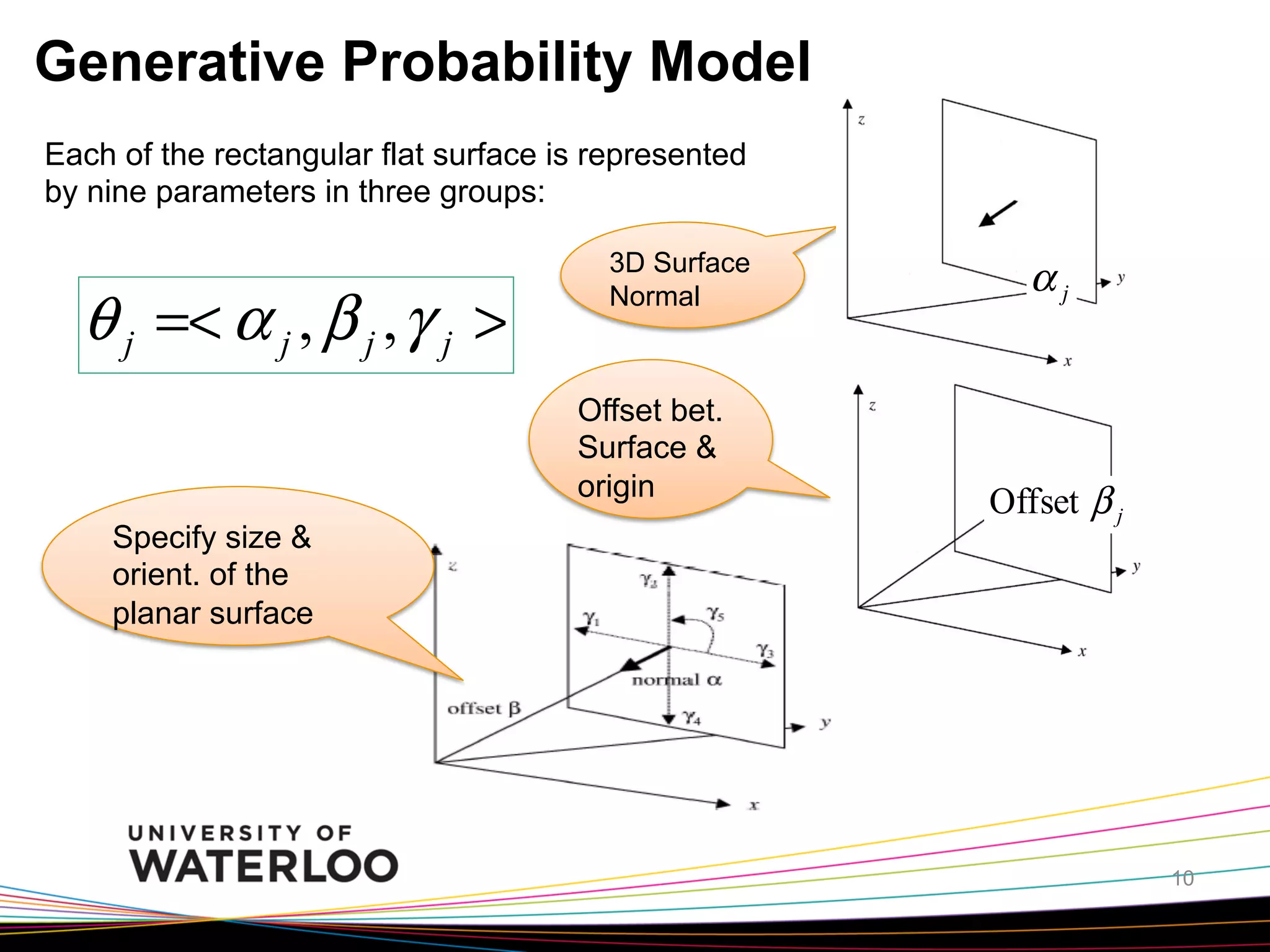
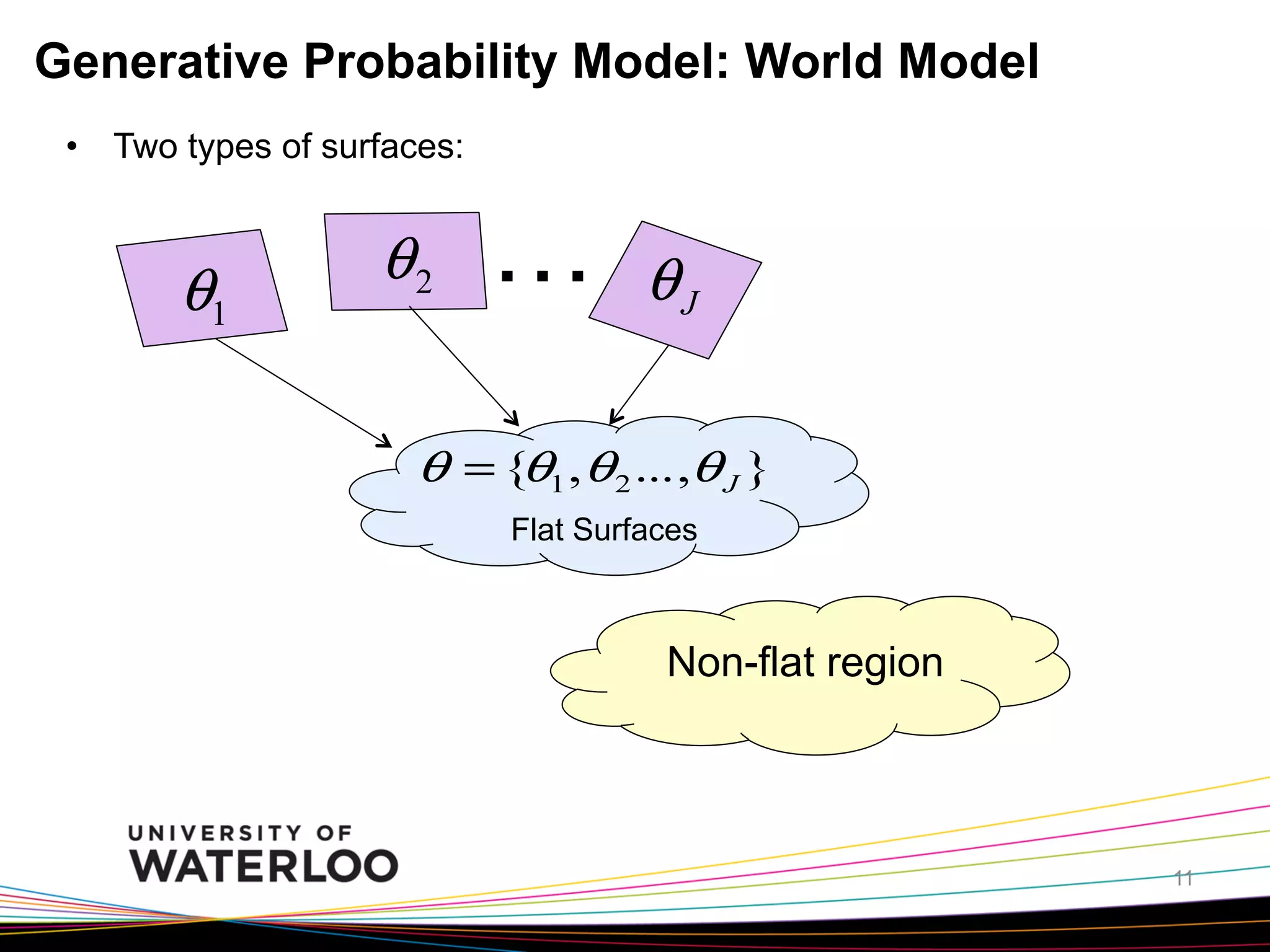
This document summarizes a probabilistic algorithm for online 3D mobile robot mapping presented by Noha Quan Ravi. The algorithm uses an online Expectation-Maximization approach to build 3D maps from laser rangefinder and camera sensor data in real-time. It models the environment as planar surfaces and represents each surface with nine parameters. The algorithm iterates between estimating surface correspondences to measurements (E-step) and re-estimating the surface parameters (M-step). It processes a constant number of new measurements at each time step to allow real-time mapping performance as the robot moves through its environment. Experimental results demonstrate it can successfully build 3D maps of indoor environments in real-time.



![The Log-Likelihood Function
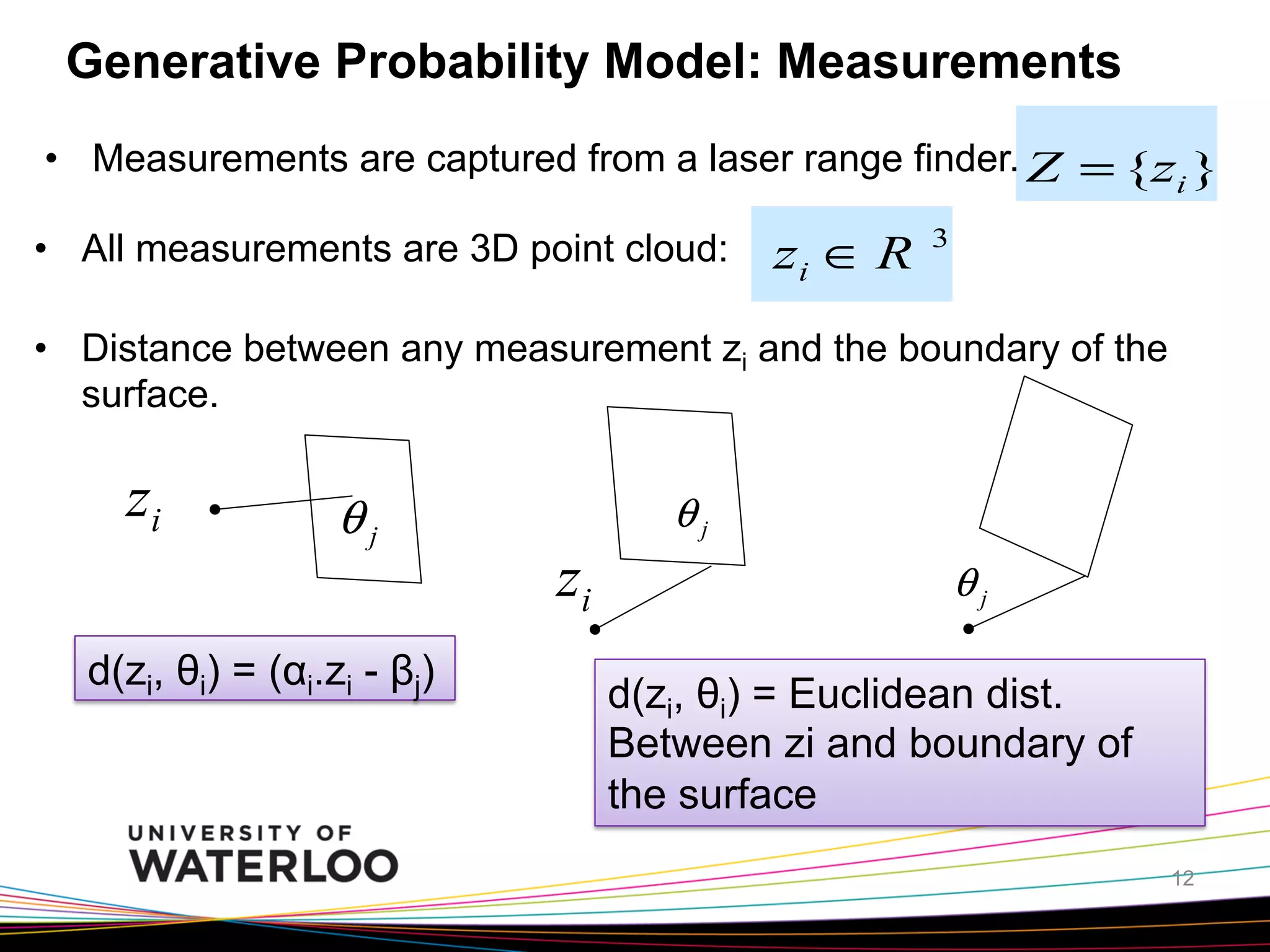
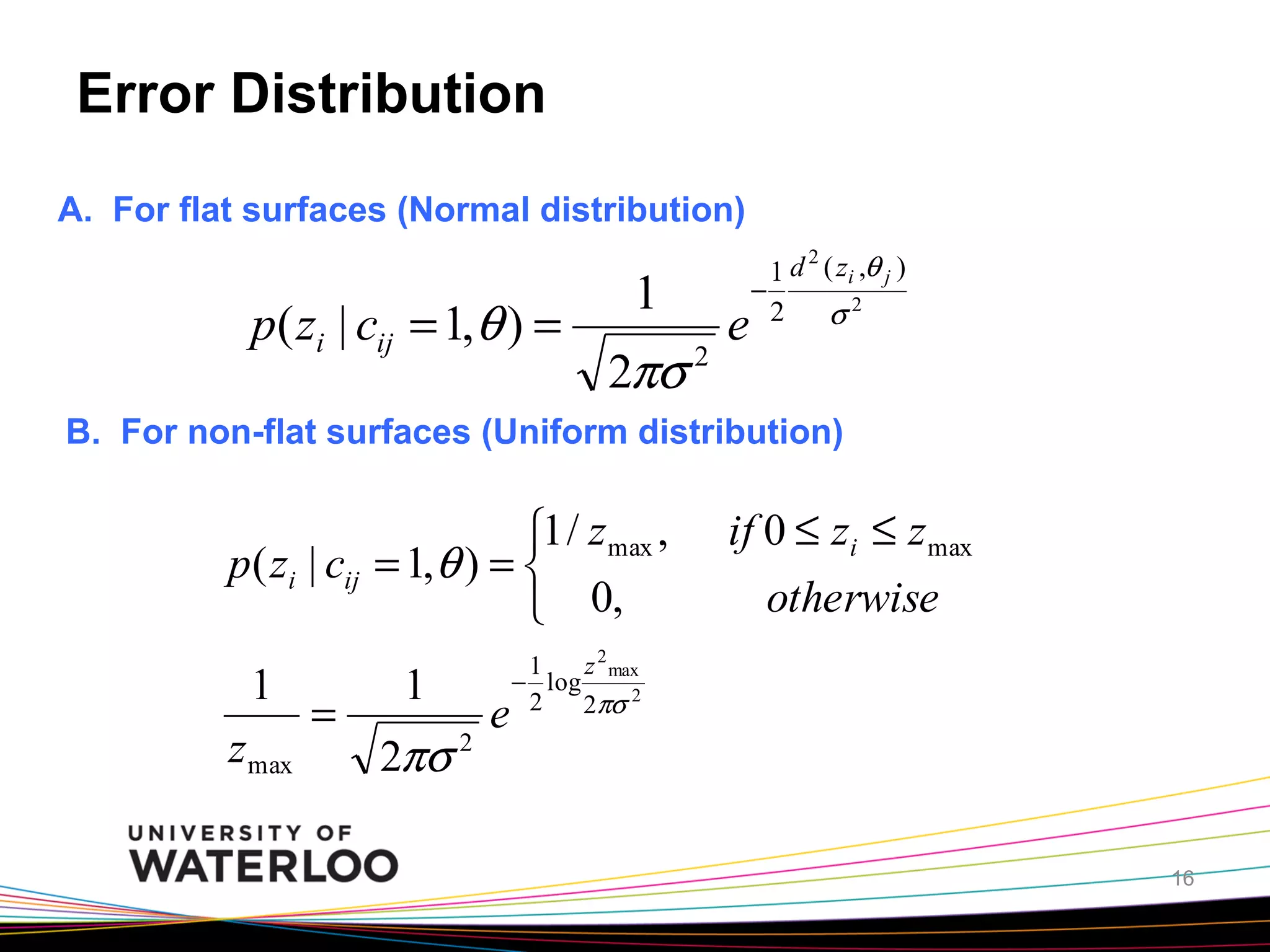
• Sensor Model: Conditional probability
p( zi | Ci ,θ ) =
1
2πσ 2
e
1
z 2 ma x
− [ ci* log
+
2
2
2πσ
∑ j cij
d 2 ( zi ,θ j )
σ
2
]
• Sensor Model: Joint probability
p( zi , Ci | θ ) =
1
( J + 1) 2πσ 2
e
1
z 2 max
− [ ci* log
+
2
2
2πσ
∑ j cij
d 2 ( zi ,θ j )
σ
2
]
17](https://image.slidesharecdn.com/robotmaptalk-131231113042-phpapp01/75/Robot-maptalk-17-2048.jpg)
![The Expectation of the log likelihood
• Assuming independence in measurement noise:
p( Z , C | θ )
=∏
i
1
( J + 1) 2πσ
2
e
1
z 2 max
− [ ci* log
+
2
2πσ 2
∑ j cij
d 2 ( zi ,θ j )
σ2
]
• EM: take the log likelihood (take the log of the above equation)
EC = [log p ( Z , C | θ ) | Z , θ ]
⎡
1
1
z 2 max
∑ ⎢log ( J + 1) 2πσ 2 − 2 E[ci* | zi ,θ ] log 2πσ 2
i ⎢
⎣
d 2 ( zi , θ j ) ⎤
1
− ∑ j E[cij | zi , θ ]
⎥
2
σ2 ⎥
⎦
18](https://image.slidesharecdn.com/robotmaptalk-131231113042-phpapp01/75/Robot-maptalk-18-2048.jpg)
![EM Algorithm: offline
• A popular method for optimization
• Uses hill climbing in likelihood space.
• Used for problems with latent variables.
z
• Input: measurement i,
the 3D points
1
• Output:
[ n +1]
< α [ n+1] , β [ n+1] , γ [ n+1] >
A map θ
which maximize the expectation log likelihood
over correspondences C
• EM is an iterative process. Each iteration
includes two steps: E-step and M-step.
θ
...
θ2
θJ
Non-flat
region](https://image.slidesharecdn.com/robotmaptalk-131231113042-phpapp01/75/Robot-maptalk-20-2048.jpg)
![EM Algorithm: offline
A. The E-Step
- Initialize θ [0] = A random map
- Calculate the expectations of the unknown
correspondences for the current map θ [n] .
[
eijn ] = E[cij | zi ,θ [ n ] ] = p(cij | zi ,θ [ n ] )
p( zi | cij ,θ ) p(cij | θ )
[n]
=
[n]
p ( zi | θ [ n ] )
e
=
e
2
z max
2
1
− log
2 2πσ
2
1 d ( zi |θ j )
−
2 σ2
+ ∑k e
−
2
1 d ( zi |θ k )
2 σ2
ei[*n ] = E[ci* | zi ,θ [ n ] ] = p(cij | zi ,θ [ n ] )
p( zi | ci* ,θ [ n ] ) p(ci* | θ [ n ] )
=
p ( zi | θ [ n ] )
e
=
e
2
z max
1
− log
2 2πσ 2
z2
1
− log max2
2 2πσ
+ ∑k e
1 d 2 ( zi |θ k )
−
2 σ2
21](https://image.slidesharecdn.com/robotmaptalk-131231113042-phpapp01/75/Robot-maptalk-21-2048.jpg)
![EM Algorithm: offline (cont.)
B. The M-Step
• Goal: Maximize the expectation of the log likelihood where
the expectation is taken over all the correspondences C.
EC = [log p(Z , C | θ ) | Z ,θ ]
⎡
1
1
z 2 max
∑ ⎢log ( J + 1) 2πσ 2 − 2 E[ci* | zi ,θ ] log 2πσ 2
i ⎢
⎣
d 2 ( zi , θ j ) ⎤
1
− ∑ j E[cij | zi ,θ ]
⎥
2
σ2 ⎥
⎦
The quadratic optimization problem is solved via Lagrange multipliers.
22](https://image.slidesharecdn.com/robotmaptalk-131231113042-phpapp01/75/Robot-maptalk-22-2048.jpg)
































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)


