Download to read offline

















![REFERENCES
[1] “Aass-loop dataset,” http://kos.informatik.uni-
osnabrueck.de/3Dscans.
[2] “Freiburg 2 metallic sphere 2 dataset,”
http://cvpr.in.tum.de/data/datasets/rgbd-dataset/.
[3] V. Andersen, H. Aanæs, and J. Bærentzen, “Surfel
based geometrY resonstruction,” Theory and Practice of
Computer Graphics8.
[4] P. J. Besl and N. D. McKay, “A method for registration
of 3-d shapes,”
IEEE Transactions on Pattern Analysis and Machine
Intelligence,](https://image.slidesharecdn.com/i1fj6hb8quondwfybwcy-signature-c8124840f330e0fc6ff5b57ab0eaa4d39ec0613c71b097b28c9c220b9255dab3-poli-160127183304/85/Graphics-20-320.jpg)


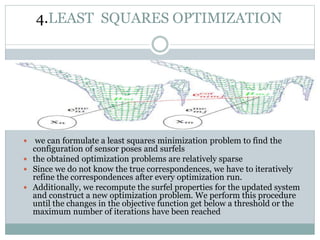
This document summarizes a technique for generating highly accurate 3D surface models from sparse sensor data using sparse surface adjustment. It proposes modeling the surface as small planar patches called surfels, optimizing the poses of the sensor and surfels jointly to minimize errors, and iteratively refining correspondences between surfels. Experiments on environmental and object datasets demonstrate improved consistency over standard SLAM techniques.