This document summarizes a presentation on modeling behavior modification through reward-induced attitude change. It describes:
1) Modeling the internal cognitive and psychological state of a person and designing a controller to track desired behavior via rewards.
2) The system model accounts for theories of planned behavior, cognitive dissonance, and overjustification. Dissonance is quantified as the percentage of inconsistent cognitive pairs.
3) The controller is designed in two stages to either increase positive attitude or allow for attitude reversal, with the goal of minimizing cognitive dissonance and guiding behavior.

![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
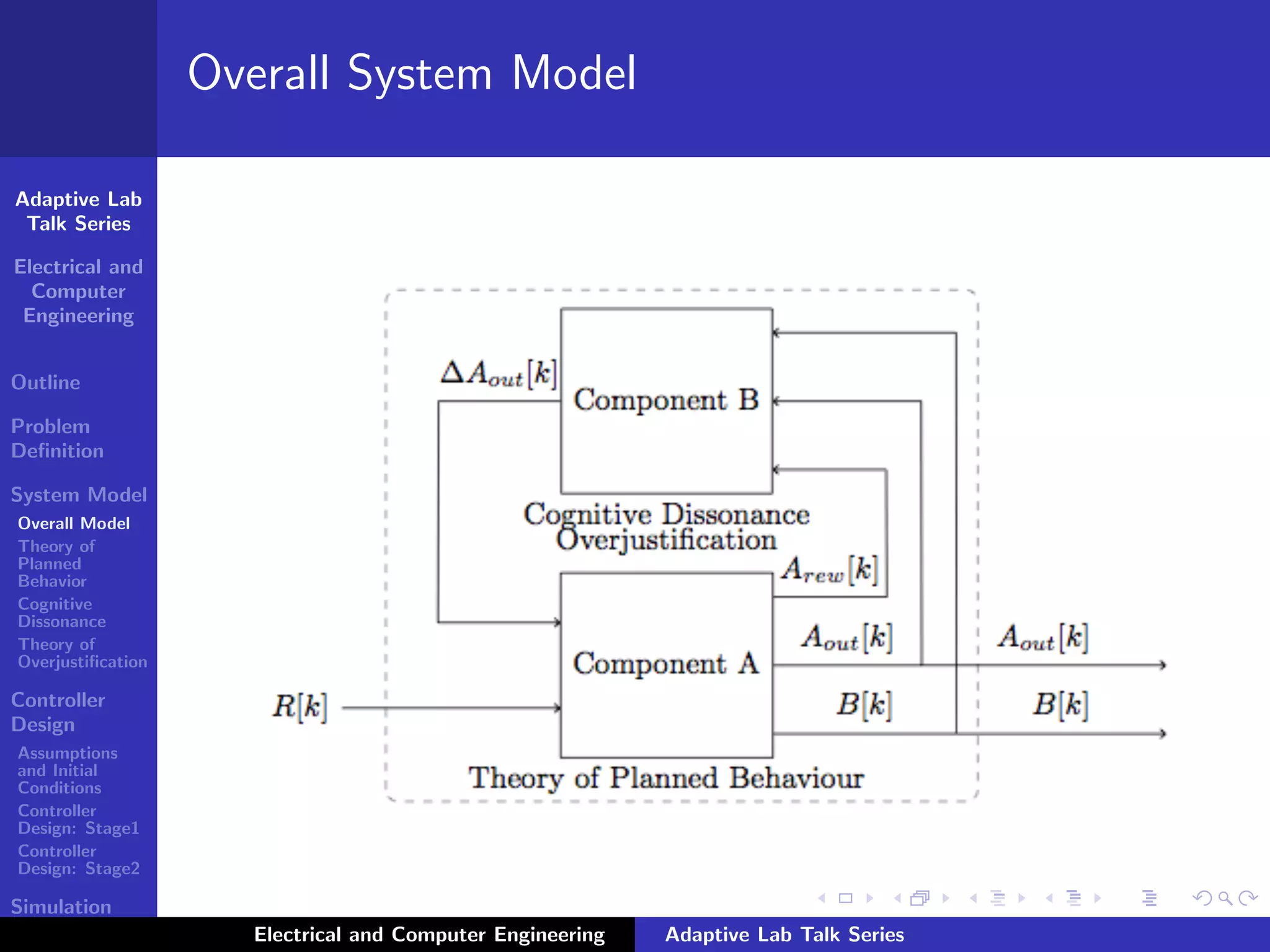
Theory of Planned Behavior
Aout[k] = Aout[k − 1] + ∆Aout[k − 1], (1)
∆Aout[k] = ∆ACD
out [k] + ∆AOJ
out[k], (2)
Arew[k] = r1Arew[k − 1] + µ1(1 − r1)R[k − 1], (3)
BI[k] = Aout[k] + Arew[k], (4)
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-6-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Theory of Planned Behavior
B[k] =
Bd[k] if BI[k] ≥ Bd[k] and Aout[k] ≤ Bd[k]
Aout[k] if (BI[k] < Bd[k] and Aout[k] ≥ 0)
or Aout[k] > Bd[k]
0 otherwise.
(5)
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-7-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Quantifying Dissonance Pressure
Dissonance = ”%” of inconsistent cognitive pairs
PCD
raw[k] =
Bsgn[k] Mincon[k]
Mincon[k]+Mcon[k] if Mincon[k] + Mcon[k] >
0 otherwise.
Bsgn[k] =
+1 if B[k] ≥ Bd[k] or Aout[k] ≥ 0
−1 otherwise.
(7)
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-13-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Quantifying Dissonance Pressure - cont.
M
1
incon[k] =
|Arew[k]| if sgn(Arew[k]) = Brel[k]
0 otherwise,
(8)
M
2
incon[k] =
|Aout[k]| if sgn(Aout[k]) = Bsgn[k]
0 otherwise,
(9)
M
1
con[k] =
|Arew[k]| if sgn(Arew[k]) = Brel[k]
0 otherwise,
(10)
M
2
con[k] =
|Aout[k]| if sgn(Aout[k]) = Bsgn[k]
0 otherwise,
(11)
Mincon[k] =
2
i=1
M
i
incon[k], Mcon[k] =
2
i=1
M
i
con[k], (12)
Brel[k] =
+1 if B[k] ≥ Bd[k]
−1 otherwise.
(13)
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-14-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Special Case: Attitude Reversal
Aout[k] small, R[k] small, Bd[k] is high ⇒ Child declines
the reward
To reduce Diss. pressure: increase Aout OR “give up”
jogging ⇒ Aout[k] <<<
r[k] =
+1 if Bd[k] − BI[k] > αrevAout[k], Aout[k] ≥ 0,
K1PCD
[k] > 2Aout[k], and Arew[k] > 0,
−1 otherwise.
(14)
PCD
[k] =
(1 − r2)PCD
raw[k] if r[k − 1] = 1
r2PCD
[k − 1] + (1 − r2)PCD
raw[k] otherwise.
(15)
P raw
CD
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-15-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Quantifying ∆Aout
Assume the change in Aout[k] is proportional to dissonance
pressure, with proportionality constant K1 > 0:
∆ACD
out [k] =
−K1PCD
[k] if r[k] = 1
+K1PCD
[k] otherwise.
(16)
P CD
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-16-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Overjustification Theory - cont.
Let Bt[k] = minimal attitude level to which the
overjustification effect can drive Aout[k].
Assume Bt[k] is a constant fraction of Bd[k], i.e.,
Bt[k] = αBd
· Bd[k], (17)
for some constant 0 < αBd
< 1.
If Bt[k] > Aout[k] ⇒ overjustification pressure does not
decrease Aout, and the reverse is true i.e.
Arel
out[k] = max{0, Aout[k] − Bt[k]}. (18)
where Arel
out[k]: a relative attitude with respect to Bt[k]
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-18-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Overjustification Theory - cont.
Then the raw and filtered overjustification pressures, and the resulting change in intrinsic attitude, are
computed just as in our previous work, but using Arel
out instead of Aout, as follows:
P
OJ
raw[k] =
Arel
out[k]Arew[k] if Arel
out[k] > 0 and Arew[k] > 0
and B[k] ≥ Bd[k]
0 otherwise,
(19)
P
OJ
[k] = r3P
OJ
[k − 1] + (1 − r3)P
OJ
raw[k], (20)
∆A
OJ
out[k] =
−K2P OJ
[k] if K2P OJ
[k] ≤ Arel
out[k]
−Arel
out[k] otherwise.
(21)
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-19-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Assumptions
Mother Knows varoius plant parameters
(µ1, r1, r2, r3, αrev, αBd, k1, k2)andA∗
0.
The child do not know the value of B∗
d.
Bd[k + 1] is assigned to the child by end of day k.
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-22-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Assumptions
Mother Knows varoius plant parameters
(µ1, r1, r2, r3, αrev, αBd, k1, k2)andA∗
0.
The child do not know the value of B∗
d.
Bd[k + 1] is assigned to the child by end of day k.
i.c: PCD[0] = POJ [0] = Arew[0] = 0, Aout = A∗
0.
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-23-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Assumptions
Mother Knows varoius plant parameters
(µ1, r1, r2, r3, αrev, αBd, k1, k2)andA∗
0.
The child do not know the value of B∗
d.
Bd[k + 1] is assigned to the child by end of day k.
i.c: PCD[0] = POJ [0] = Arew[0] = 0, Aout = A∗
0.
Reward is not given everyday: N= Settling time
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-24-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Assumptions
Mother Knows varoius plant parameters
(µ1, r1, r2, r3, αrev, αBd, k1, k2)andA∗
0.
The child do not know the value of B∗
d.
Bd[k + 1] is assigned to the child by end of day k.
i.c: PCD[0] = POJ [0] = Arew[0] = 0, Aout = A∗
0.
Reward is not given everyday: N= Settling time
If impulsive reward applied at time 0, a transient
(1 − rk−1
2 ) appears.
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-25-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Assumptions
Mother Knows varoius plant parameters
(µ1, r1, r2, r3, αrev, αBd, k1, k2)andA∗
0.
The child do not know the value of B∗
d.
Bd[k + 1] is assigned to the child by end of day k.
i.c: PCD[0] = POJ [0] = Arew[0] = 0, Aout = A∗
0.
Reward is not given everyday: N= Settling time
If impulsive reward applied at time 0, a transient
(1 − rk−1
2 ) appears.
Approach: wait for the transient to settle before applying
the next impulsive reward.
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-26-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Stage1
BI[k + 1] ≥ Bd[k + 1].
⇓
R[k] >>> enough to force B[k + 1] > 0. >>
⇓
Bsgn[k + 1] = +1.
⇓
PCD
raw[k + 1] > 0. >>
⇓
Goal: increase Aout from −ve to +ve.
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-27-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Stage1- cont.
BI[k] = Aout[k] + Arew[k]
= A0 + µ1R[k] ≥ Bd[k + 1]
R[k] =
Bd[k + 1] + |A0|
µ1
(22)
The associated dissonance pressure is:
PCD
raw[k + 1] =
Bsgn[k + 1] · |Aout[k + 1]
|Aout[k + 1]| + Arew[k + 1]
=
|A0|
|A0| + µ1R[k]
.
(23)
Maximizing (23) subject to (22) results in Bd[k + 1] = 0 and
R[k] = |A0|/µ1. For improved robustness:
Bd[k + 1] = 2ε (24)
R[k] =
2Bd[k + 1] + |Aout[k]|
µ1
=
2 + |Aout[k]|
µ1
(25)
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-28-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Stage2
Goal: (0 ≤ Aout[k] ≤ B∗
d) for k = 0, N, 2N, 3N, . . .
Q. What is the appropriate value of R[k] that guarantee
above three conditions satisfied ?
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-29-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Stage2
Goal: (0 ≤ Aout[k] ≤ B∗
d) for k = 0, N, 2N, 3N, . . .
Use sequence of reward impulses, each impulse applied
every N days.
Q. What is the appropriate value of R[k] that guarantee
above three conditions satisfied ?
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-30-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Stage2
Goal: (0 ≤ Aout[k] ≤ B∗
d) for k = 0, N, 2N, 3N, . . .
Use sequence of reward impulses, each impulse applied
every N days.
Inorder to raise Aout[k], give the child R[k]<<< enough
to be :
Rejected by the child ⇒ PCD
< 0 ⇒ Aout ⇑ .
Avoid exciting the OVJ dynamics that makes Aout ⇓ .
Avoid attitude reversal.
Q. What is the appropriate value of R[k] that guarantee
above three conditions satisfied ?
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-31-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Stage2 - cont.
To enforce the child to reject the reward R[k] force:
BI[k + 1] < Bd[k + 1]
Aout[k] + Arew[k] < Bd[k + 1]
Aout[k] + r1Arew[k − 1] + µ1(1 − r1)R[k − 1] < Bd[k + 1]
R[k] <
Bd[k + 1] − r1Arew[k] − Aout[k]
µ1(1 − r1)
R[k] <
Bd[k + 1] − Aout[k]
µ1
(27)
Equation(27) gurantees child reject reward and OJ = 0.
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-32-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Stage2 - cont.
Attitude reversal is avoided on day k+1 if R[k] is chosen s.t :
Bd[k] − BI[k] ≤ αrevAout[k], Aout[k] ≥ 0
Bd[k] + Aout[k] − Arew[k] ≤ αrevAout[k]
Aout[k] + r1Arew[k − 1] + µ1(1 − r1)R[k − 1] ≤ Bd[k + 1]
R[k] ≥
Bd[k + 1] − (αrev + 1)Aout[k]
µ1
(28)
Equation(28) gurantees avoidance of attitude reversal.
Q. How to keep R[k] at a reasonable level ?
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-33-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Stage2 - cont.
By introducing a controller tuning parameter β ∈ (0, 1), the
aggressiveness of attitude increase can be adjusted:
Ad = βAout[k] + (1 − β)(Aout[k] + K1(1 − rN−1
2 )).
R[k] =
Aout[k]
µ1
K1(1 − rN−1
2 )
Aout[k] + K1(1 − rN−1
2 ) − Ad
− 1 . (29)
To avoid driving the attitude higher than needed (i.e., beyond
B∗
d), we add a saturator as follows:
Ad = min{B∗
d, βAout[k] + (1 − β)(Aout[k] + K1(1 − rN−1
2 ))}.
(30)
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-34-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Controller Design: Stage2 - cont.
Get the value of Bd[k + 1] from the formulas of R[k] :
Bdmin[k] = Aout[k](
K1(1 − r2)N−1
Aout[k] + K1(1 − r2)N−1 − Ad
(31)
Bdmax[k] = Aout[k](
K1(1 − r2)N−1
Aout[k] + K1(1 − r2)N−1 − Ad
+ αrev
(32)
Bdmin[k] < Bd[k + 1] ≤ Bdmax[k]. (33)
Bd[k + 1] = γBdmin[k] + (1 − γ)Bdmax[k]. (34)
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-35-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Simulation Results
0 5 10 15 20 25 30 35
0
50
100
150
Day number (k)
Behavior(mins)
Bd
*
B[k]
Bd
[k]
Open−Loop Implementation
0 5 10 15 20 25 30 35
0
50
100
YES
YES
YES
YES NO
NO
NO
Day number (k)
RewardOffered($)
R[k]
0 5 10 15 20 25 30 35
−50
0
50
Day number (k)
Attitude(mins)
Aout
[k]
∆ Aout
CD
[k]
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-36-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Simulation Results
0 5 10 15 20 25 30 35
0
50
100
150
Day number (k)
Behavior(mins)
Bd
*
B[k]
Bd
[k]
Open−Loop Implementation
0 5 10 15 20 25 30 35
0
50
100
YES
YES
YES
YES
NO
NO
NO
NO
Day number (k)
RewardOffered($)
R[k]
0 5 10 15 20 25 30 35
−50
0
50
Day number (k)
Attitude(mins)
Aout
[k]
∆ Aout
CD
[k]
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-37-2048.jpg)
![Adaptive Lab
Talk Series
Electrical and
Computer
Engineering
Outline
Problem
Definition
System Model
Overall Model
Theory of
Planned
Behavior
Cognitive
Dissonance
Theory of
Overjustification
Controller
Design
Assumptions
and Initial
Conditions
Controller
Design: Stage1
Controller
Design: Stage2
Simulation
Results
Simulation Results
0 5 10 15 20 25 30 35
0
50
100
150
Day number (k)
Behavior(mins)
Bd
*
B[k]
Bd
[k]
Open−Loop Implementation
0 5 10 15 20 25 30 35
0
50
100
YES
YES
YES
YES
NO NO NO NO NO NO
NO
Day number (k)
RewardOffered($)
R[k]
0 5 10 15 20 25 30 35
−50
0
50
Day number (k)
Attitude(mins)
Aout
[k]
∆ Aout
CD
[k]
Electrical and Computer Engineering Adaptive Lab Talk Series](https://image.slidesharecdn.com/mytalk-130620134204-phpapp01/75/AdaptiveLab-Talk1-38-2048.jpg)