Downloaded 48 times
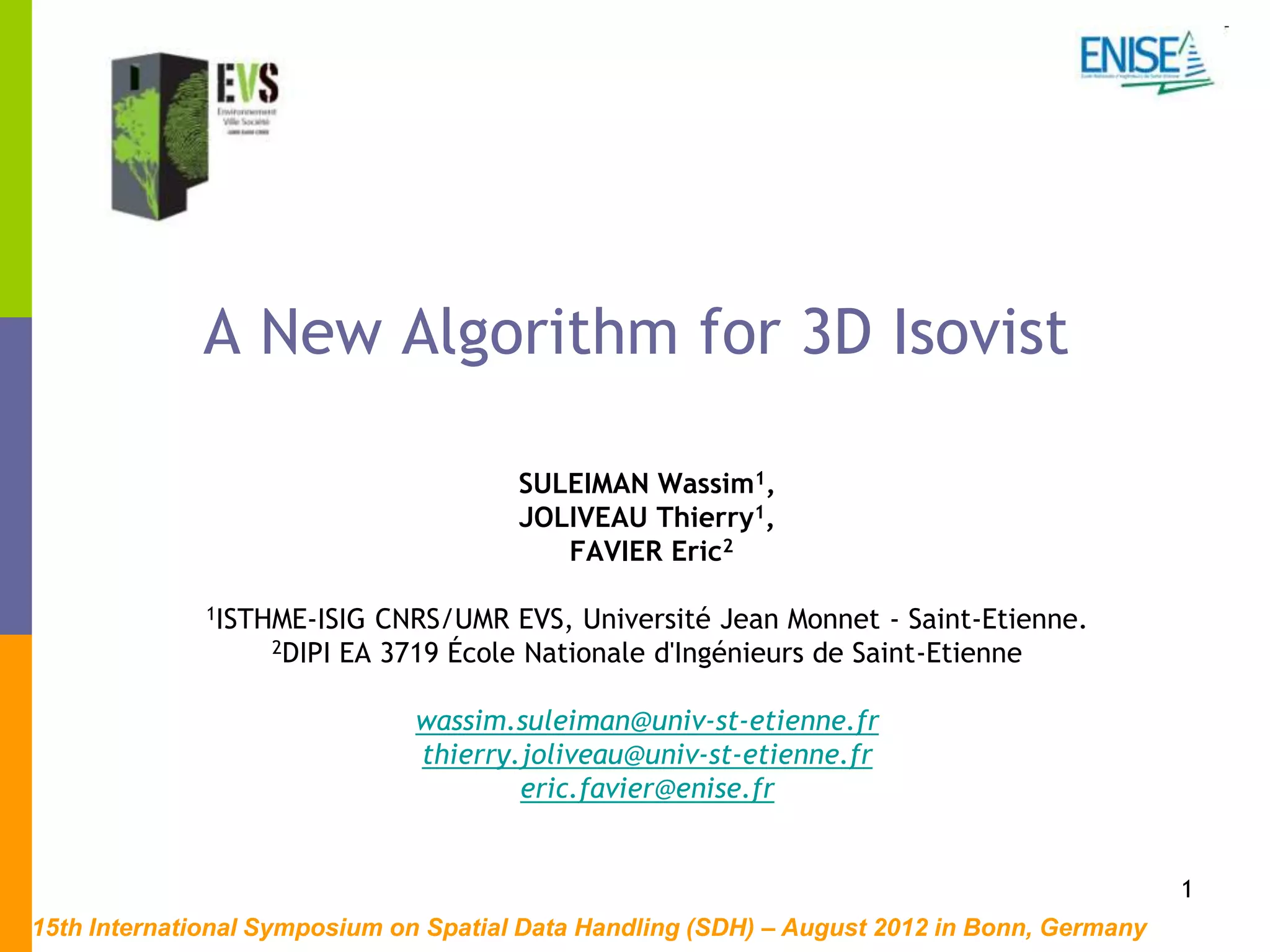
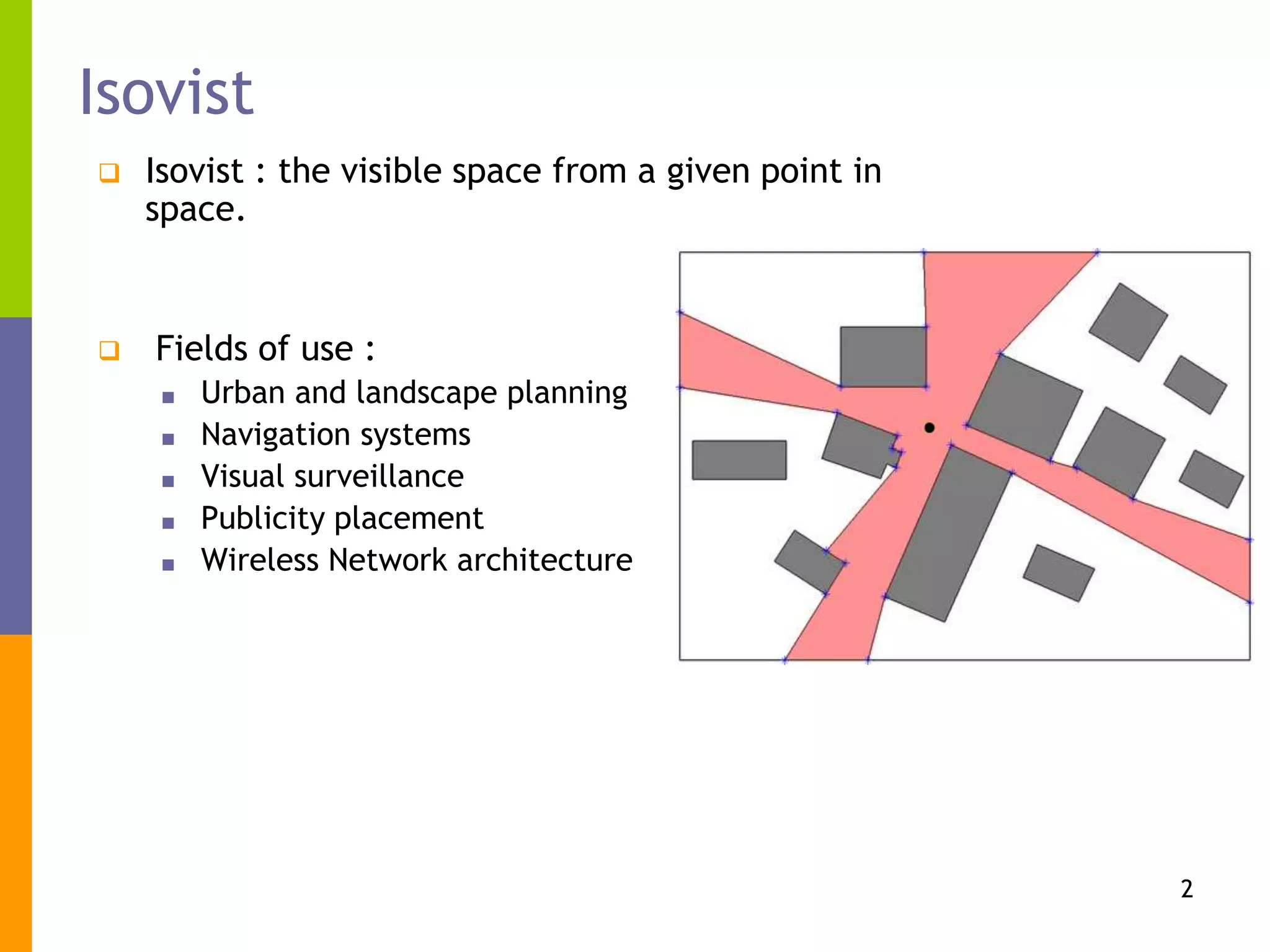






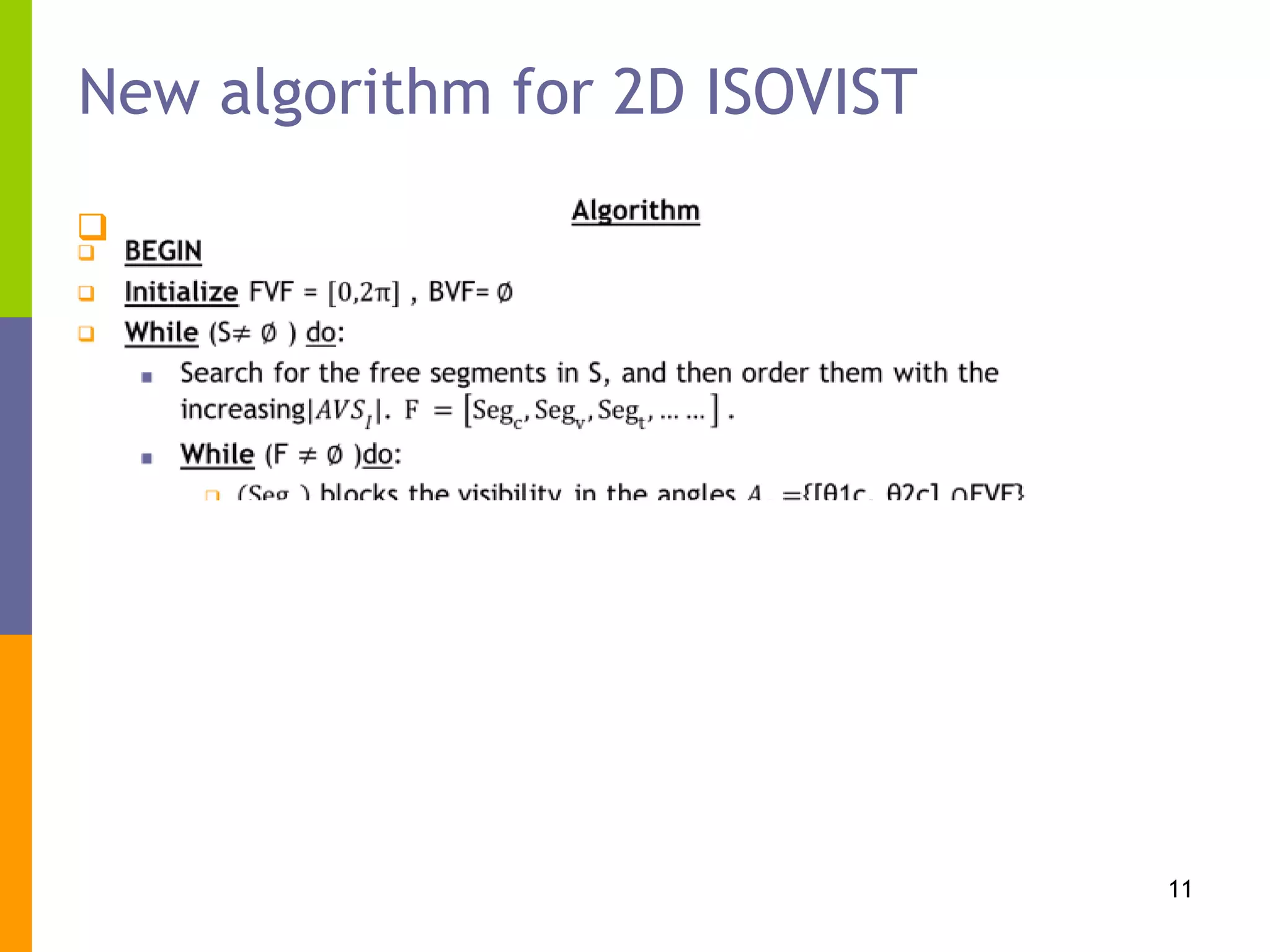




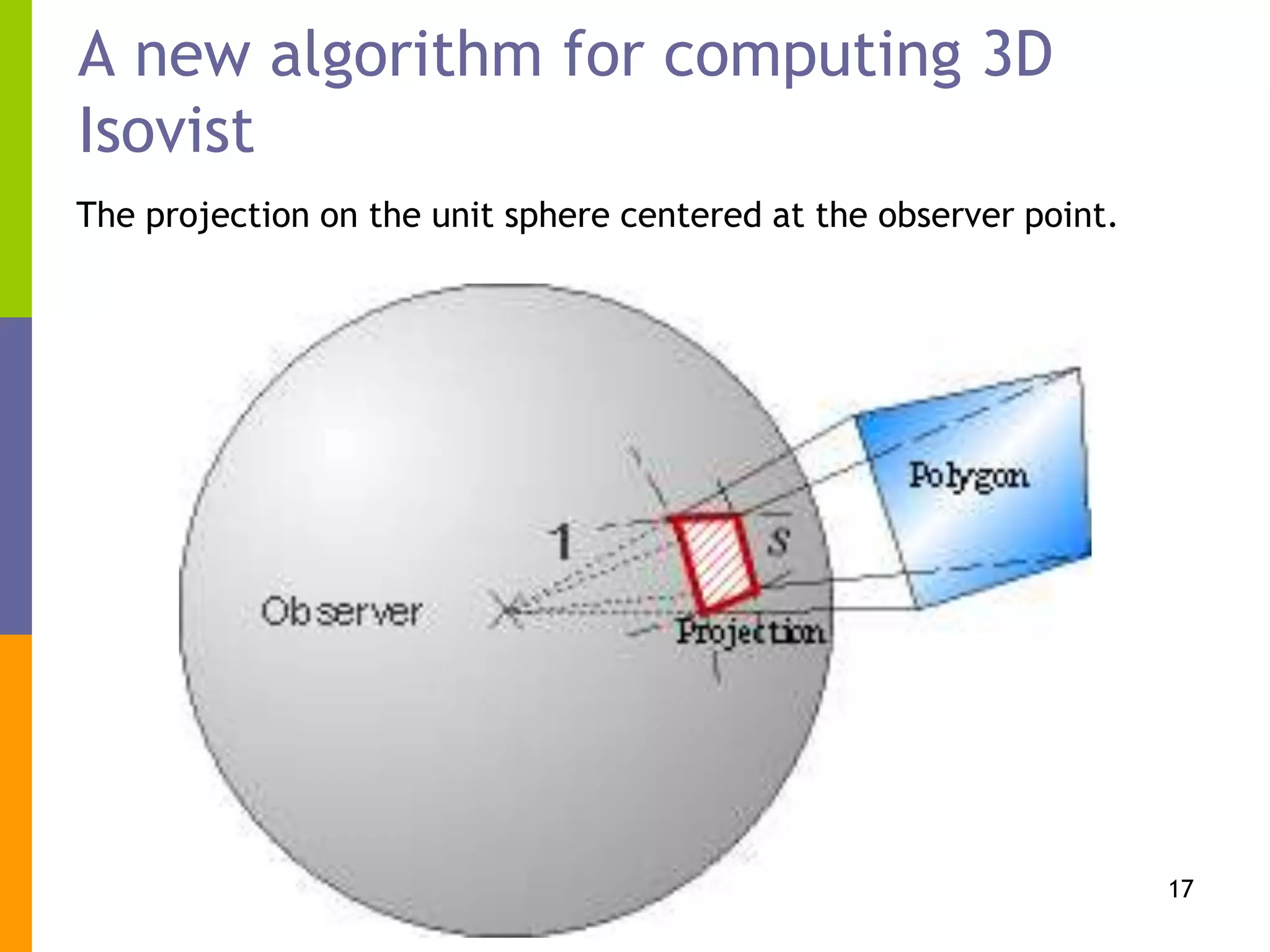



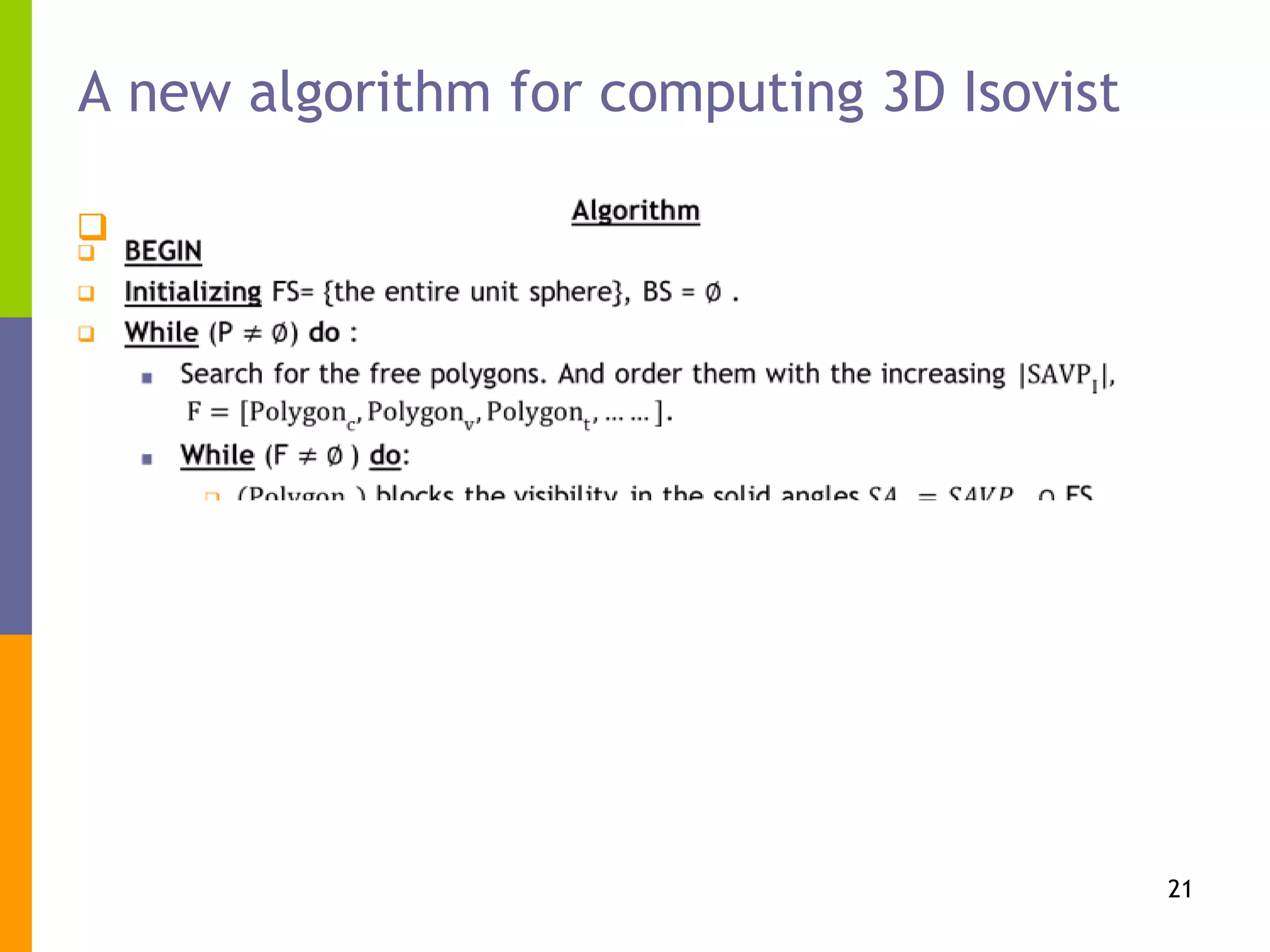





The document presents a new algorithm for computing 2D and 3D isovist, which captures the visible space from a given point, addressing challenges posed by complex topographies and buildings. It details the principles, techniques, and implementations using MATLAB, highlighting applications in urban planning, navigation, and visibility analysis. Future work includes developing standalone software and optimizing calculations through parallel processing.