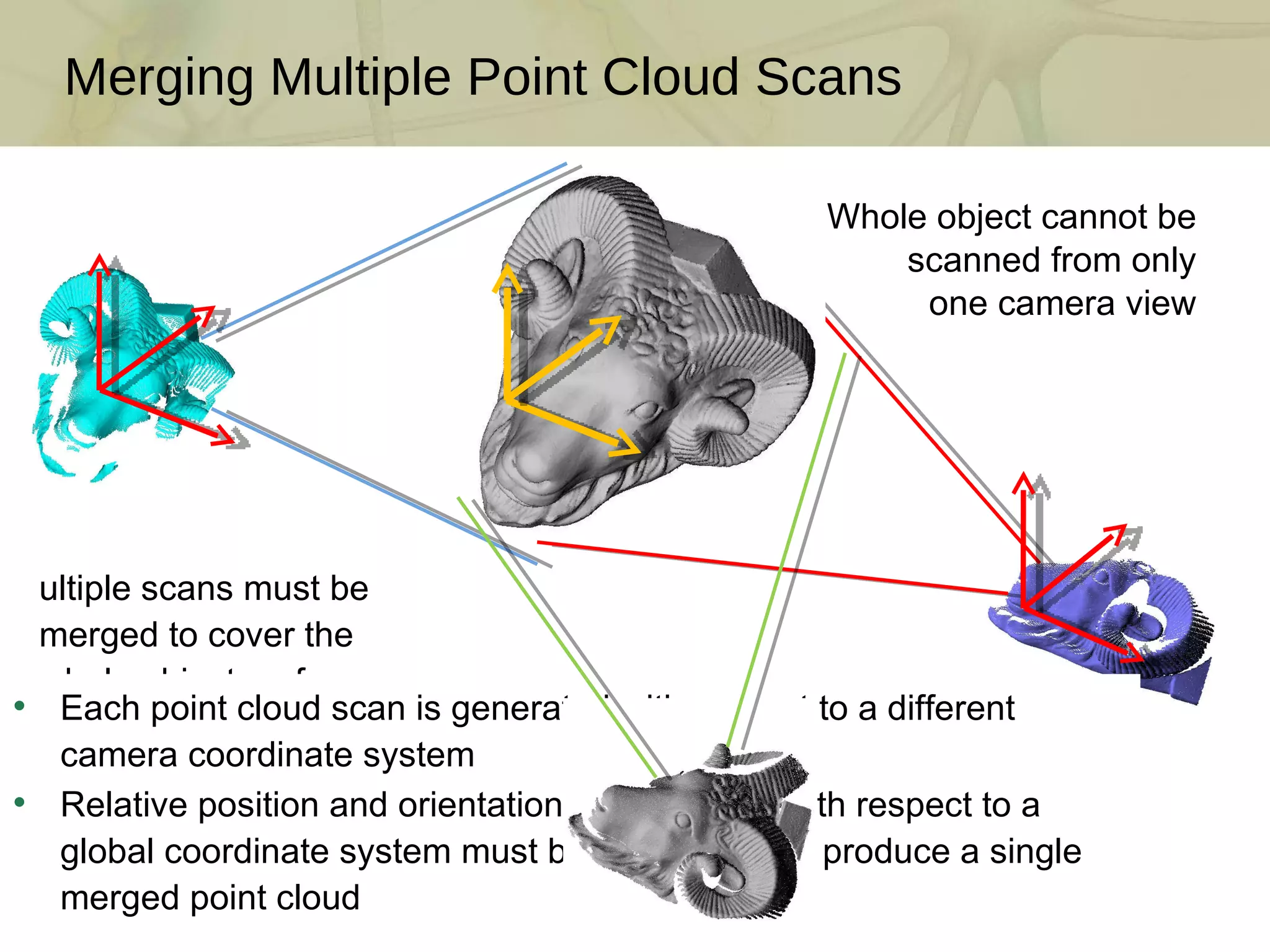
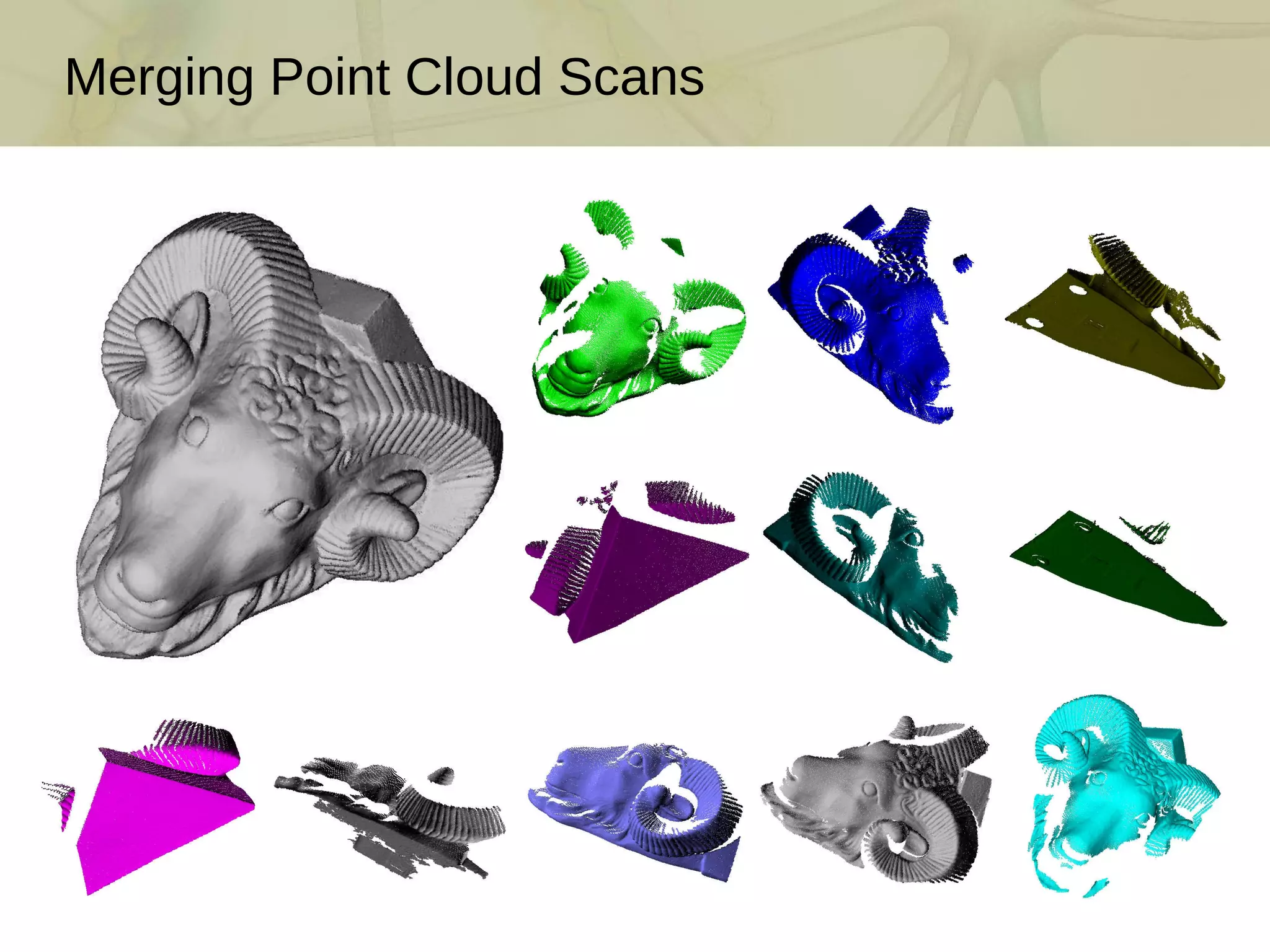
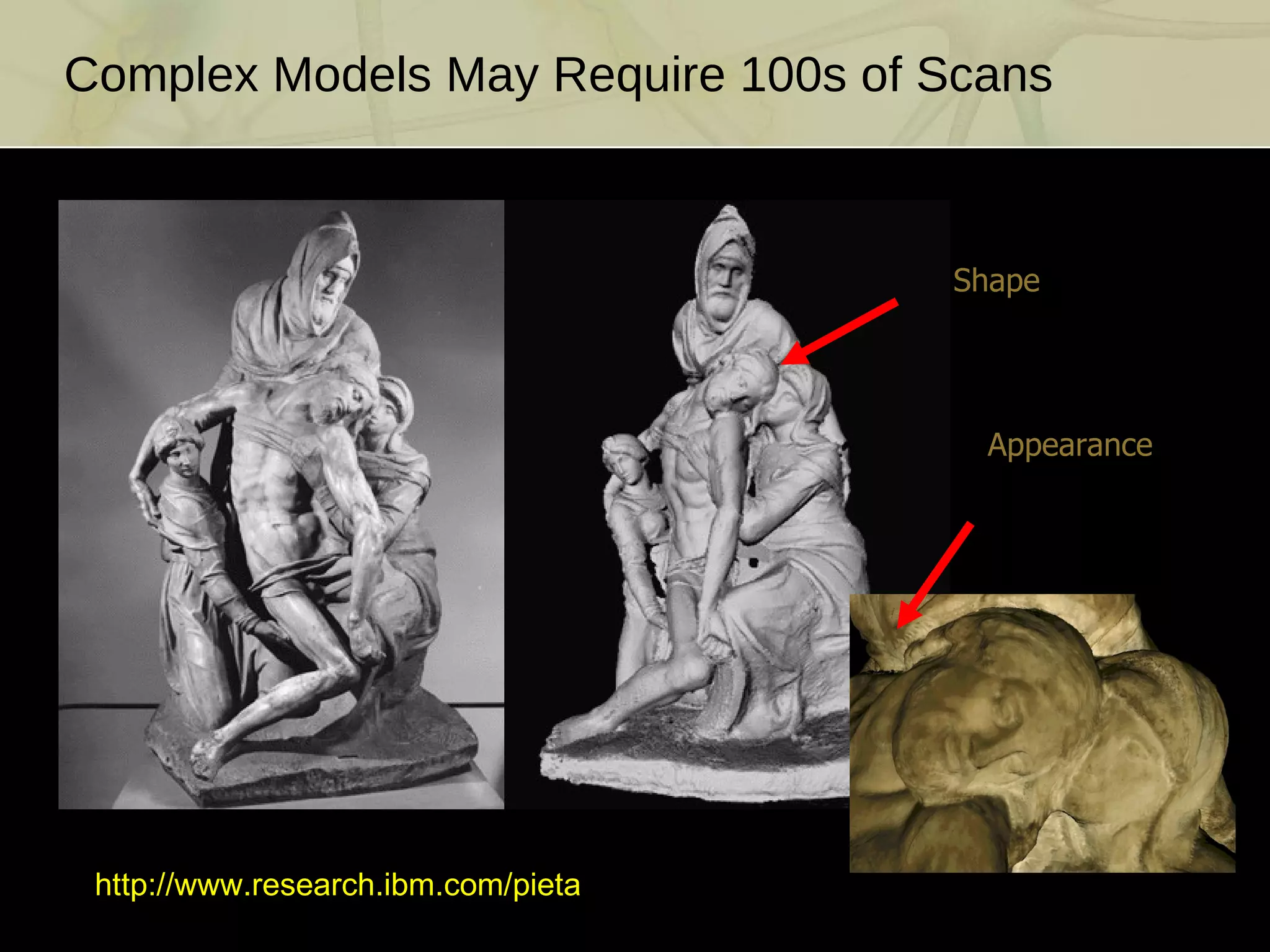
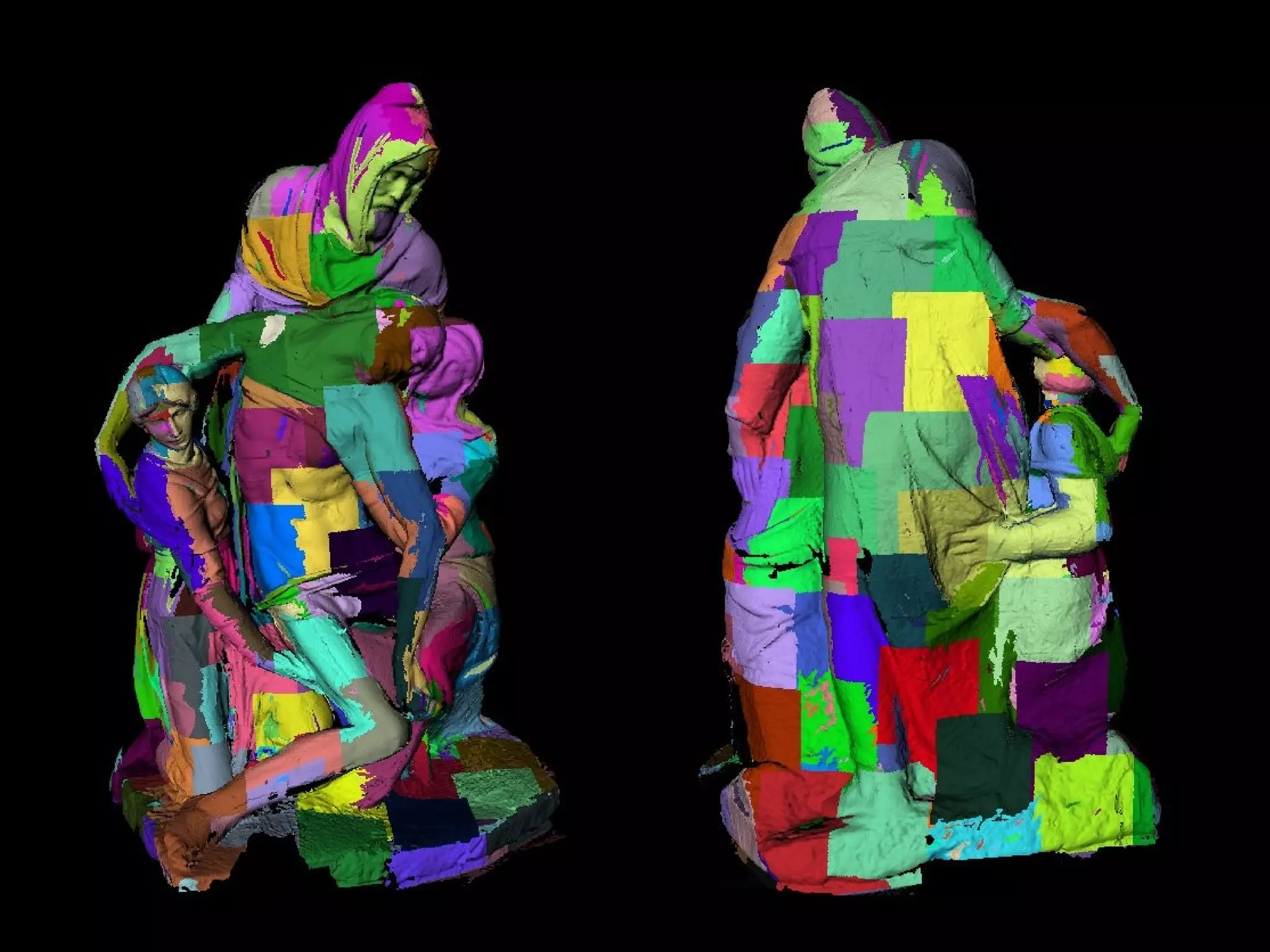
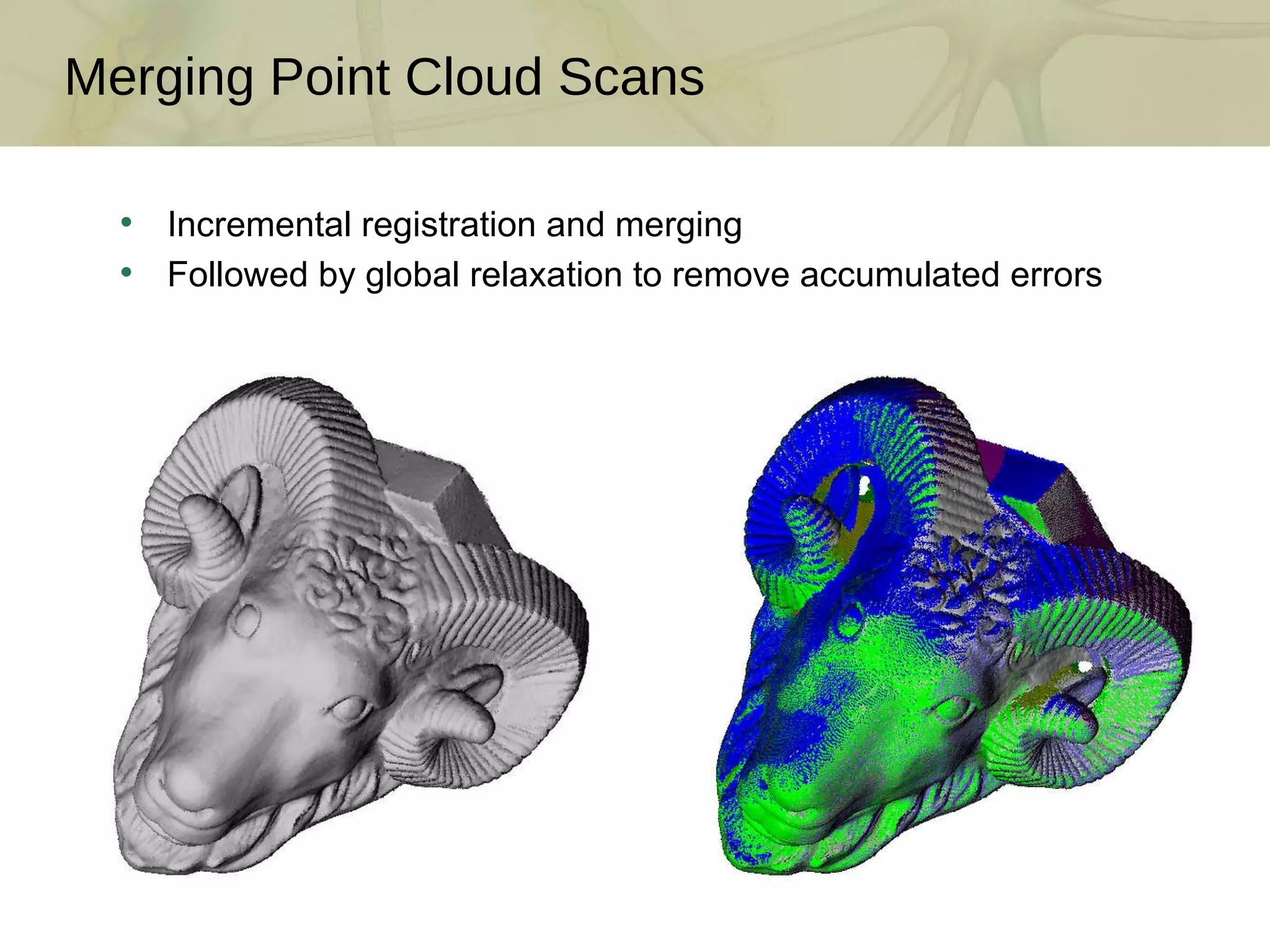
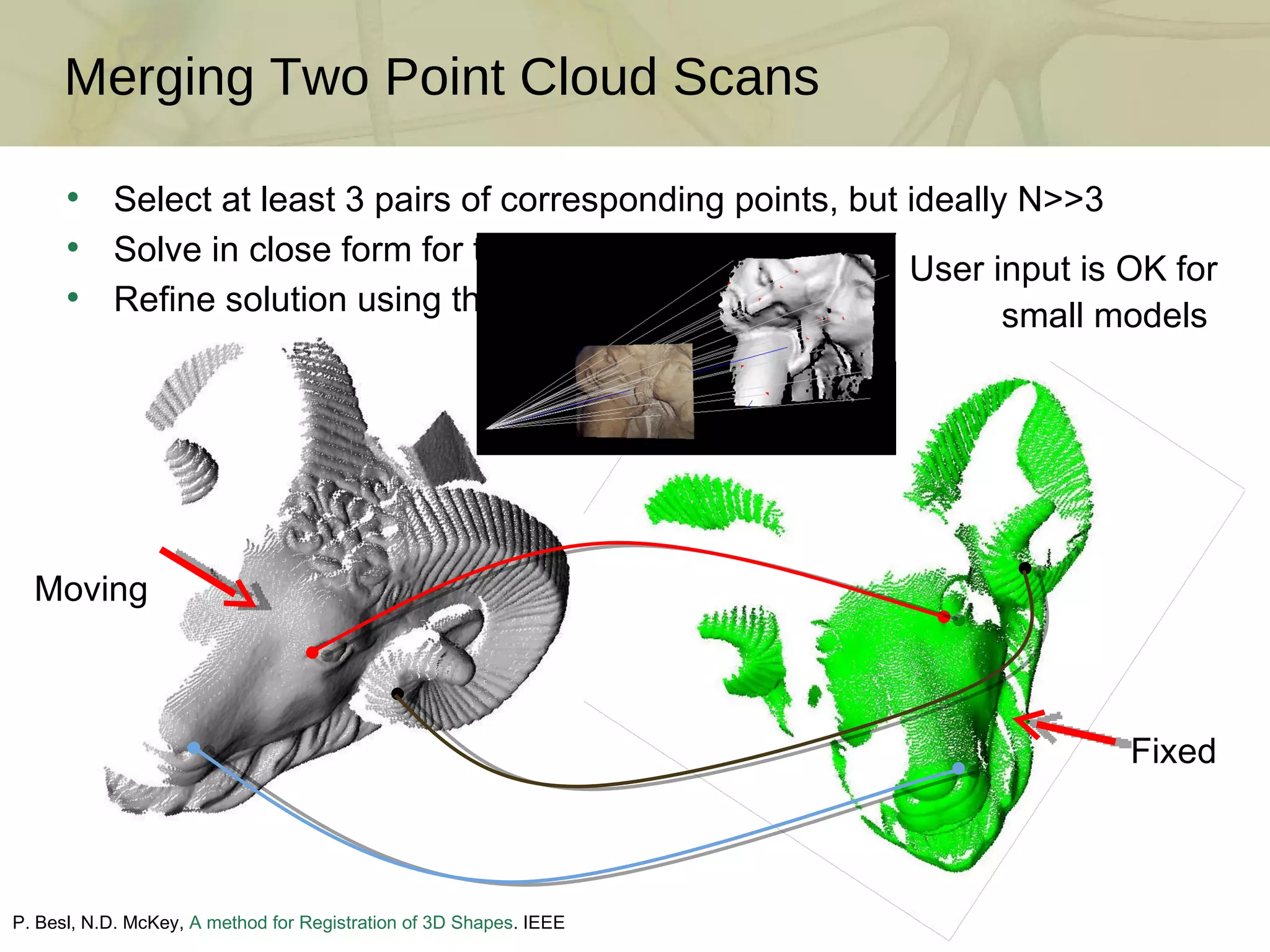
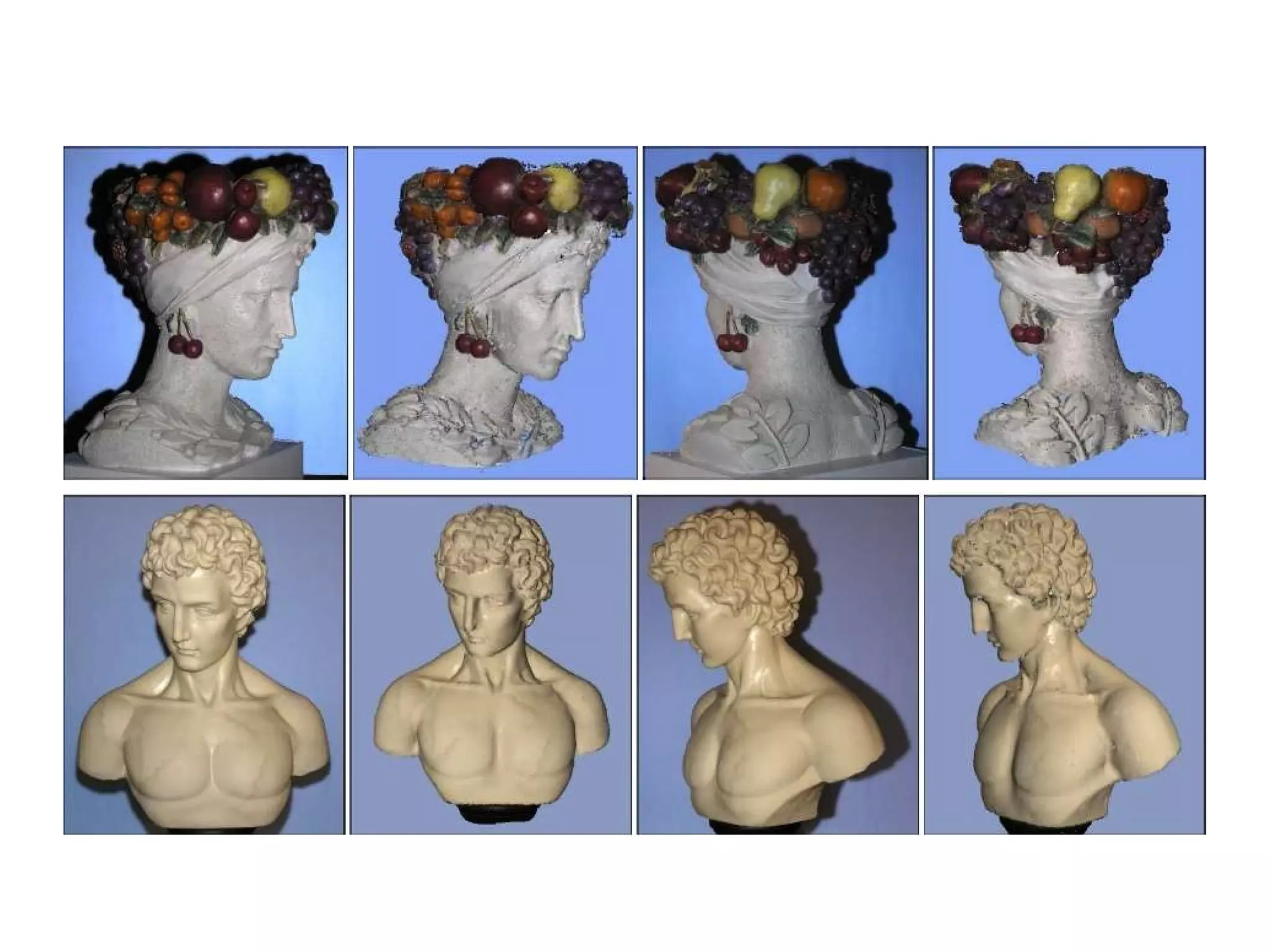
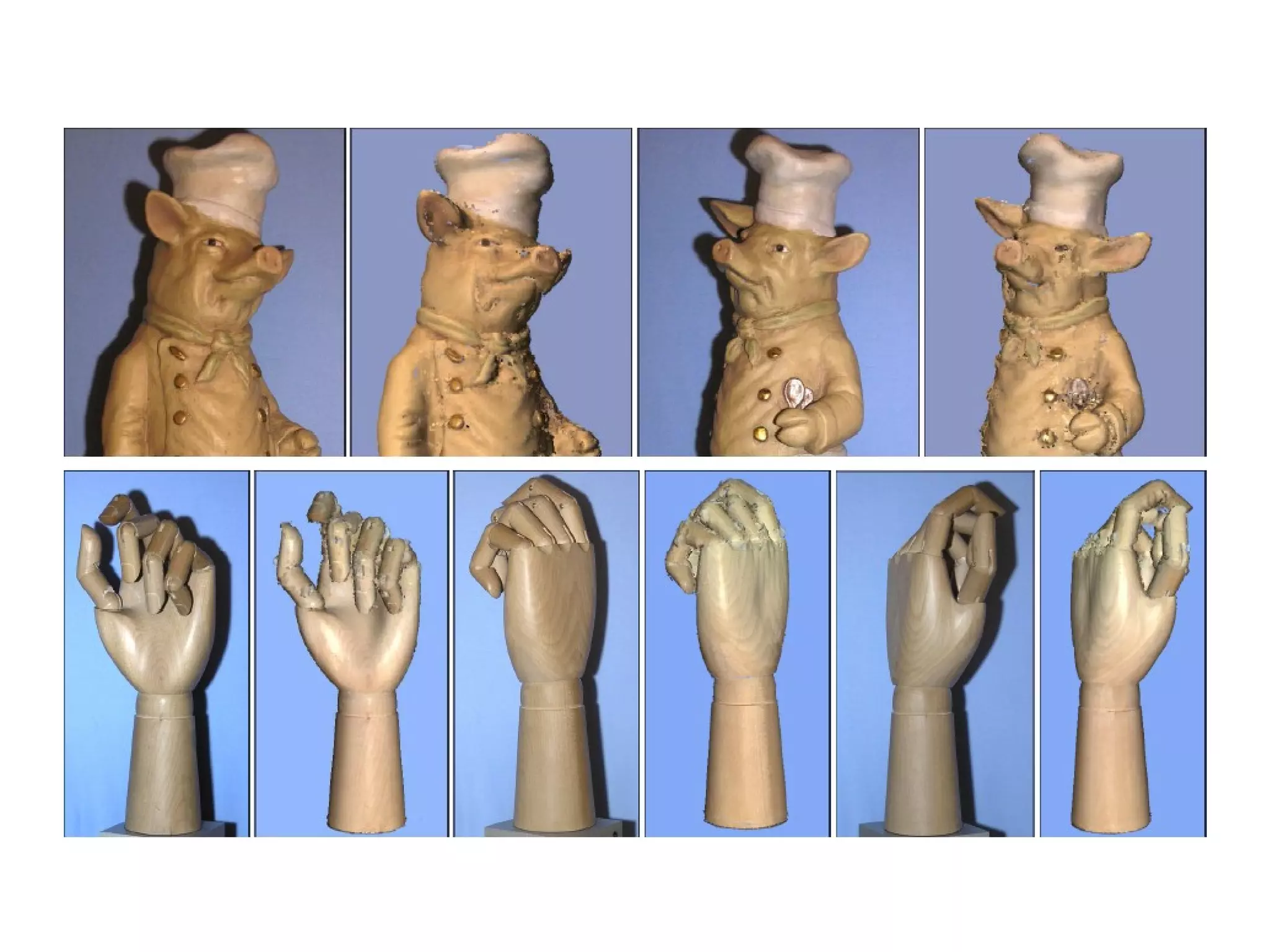
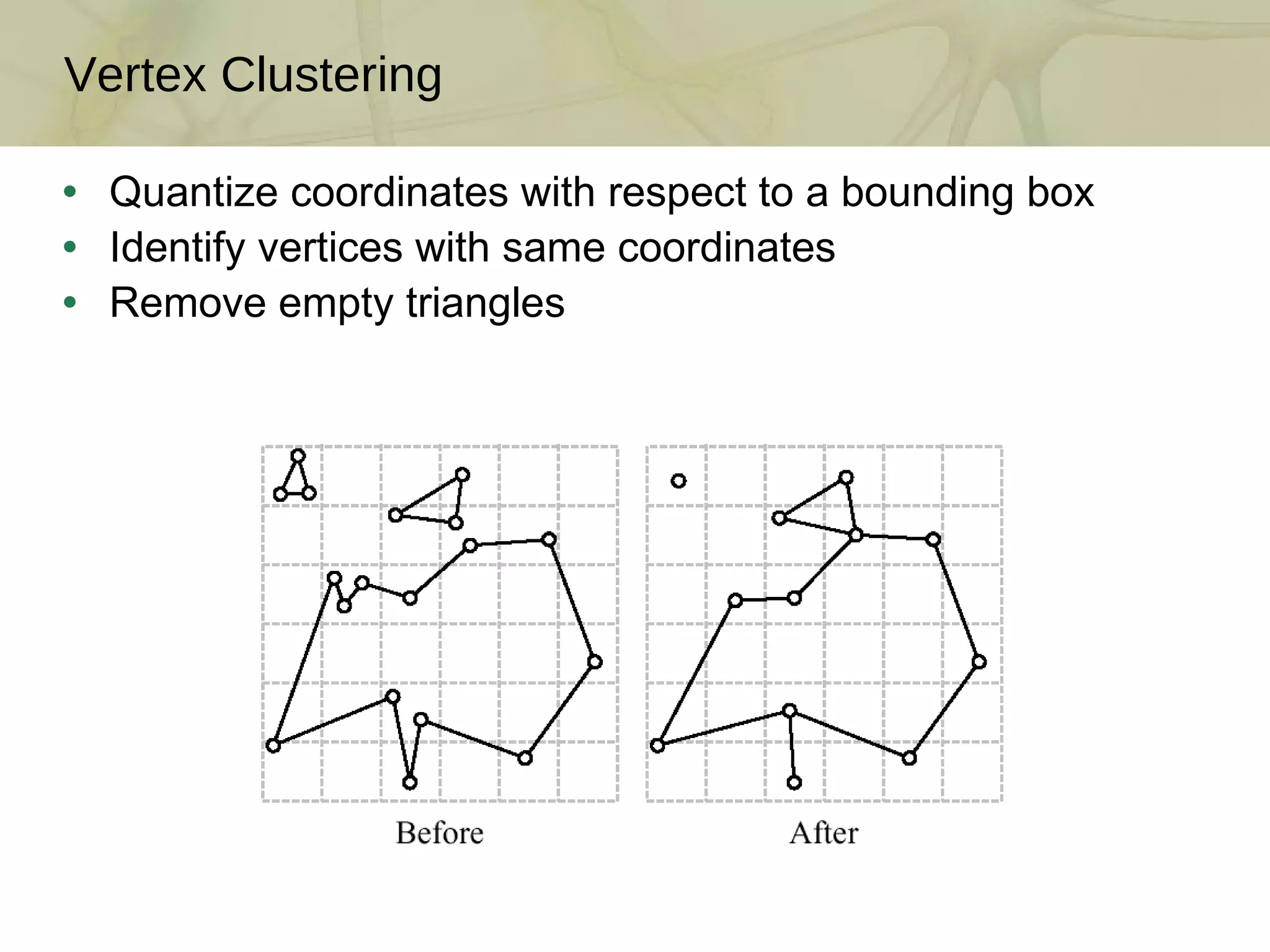
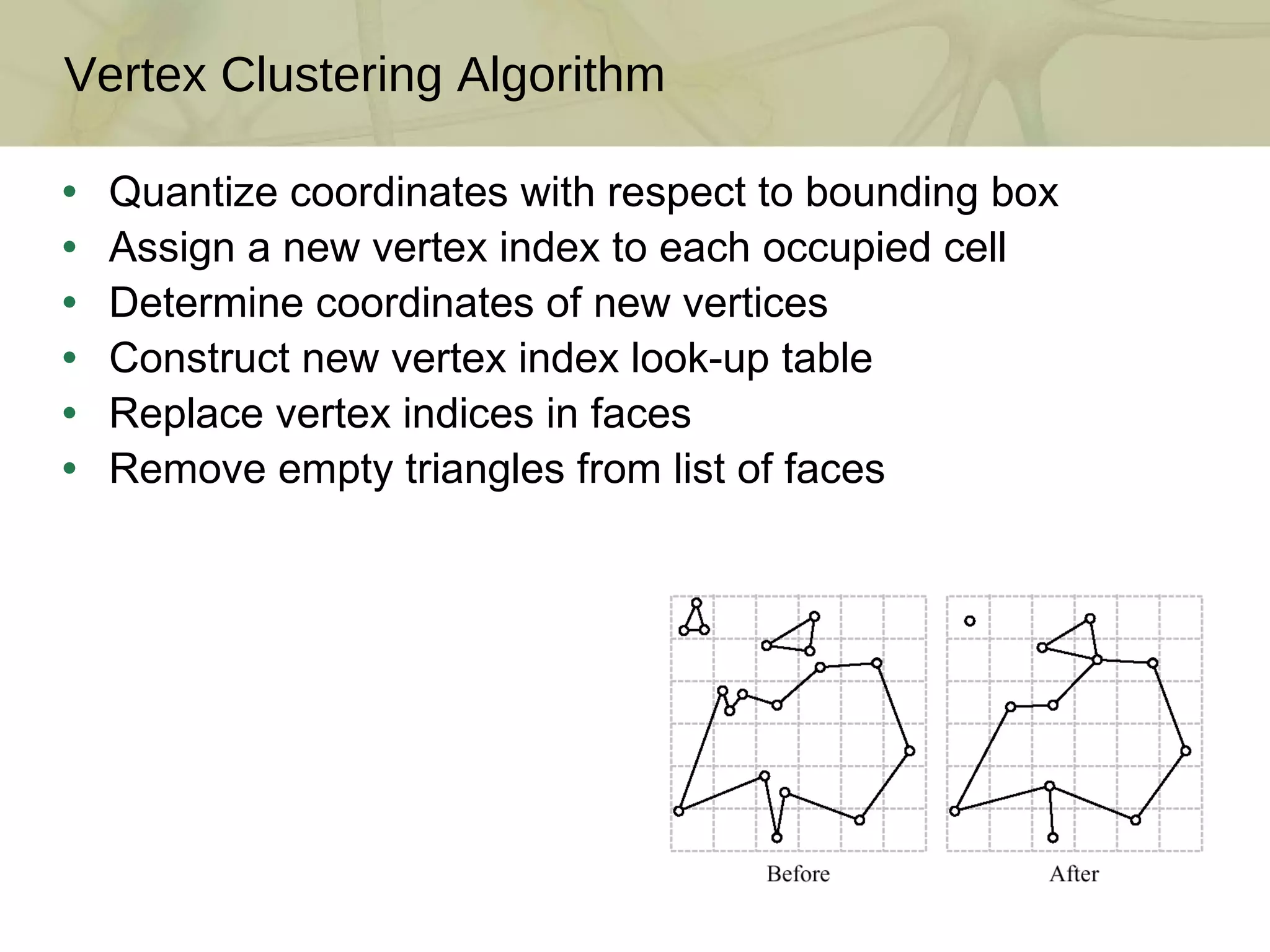
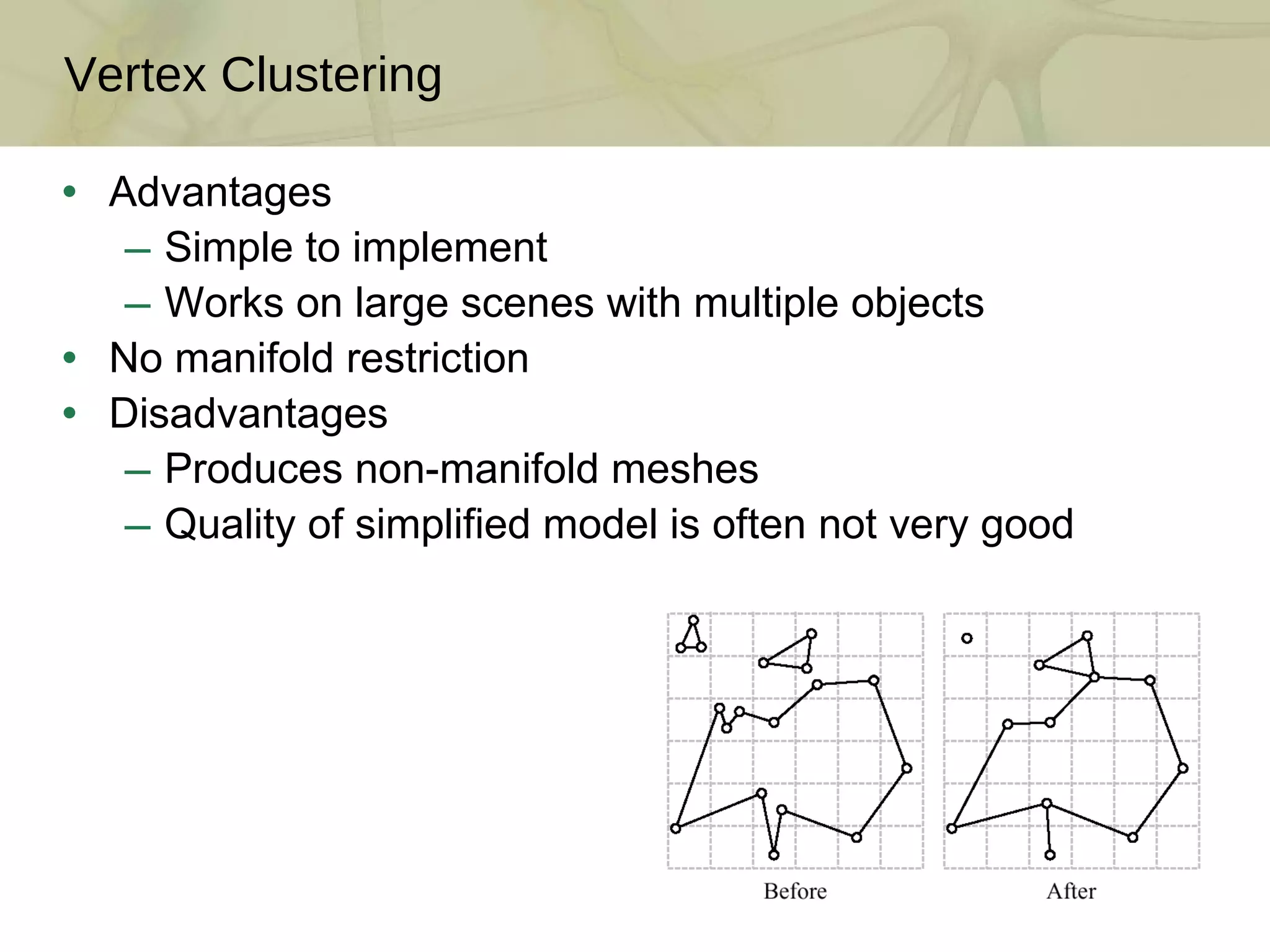
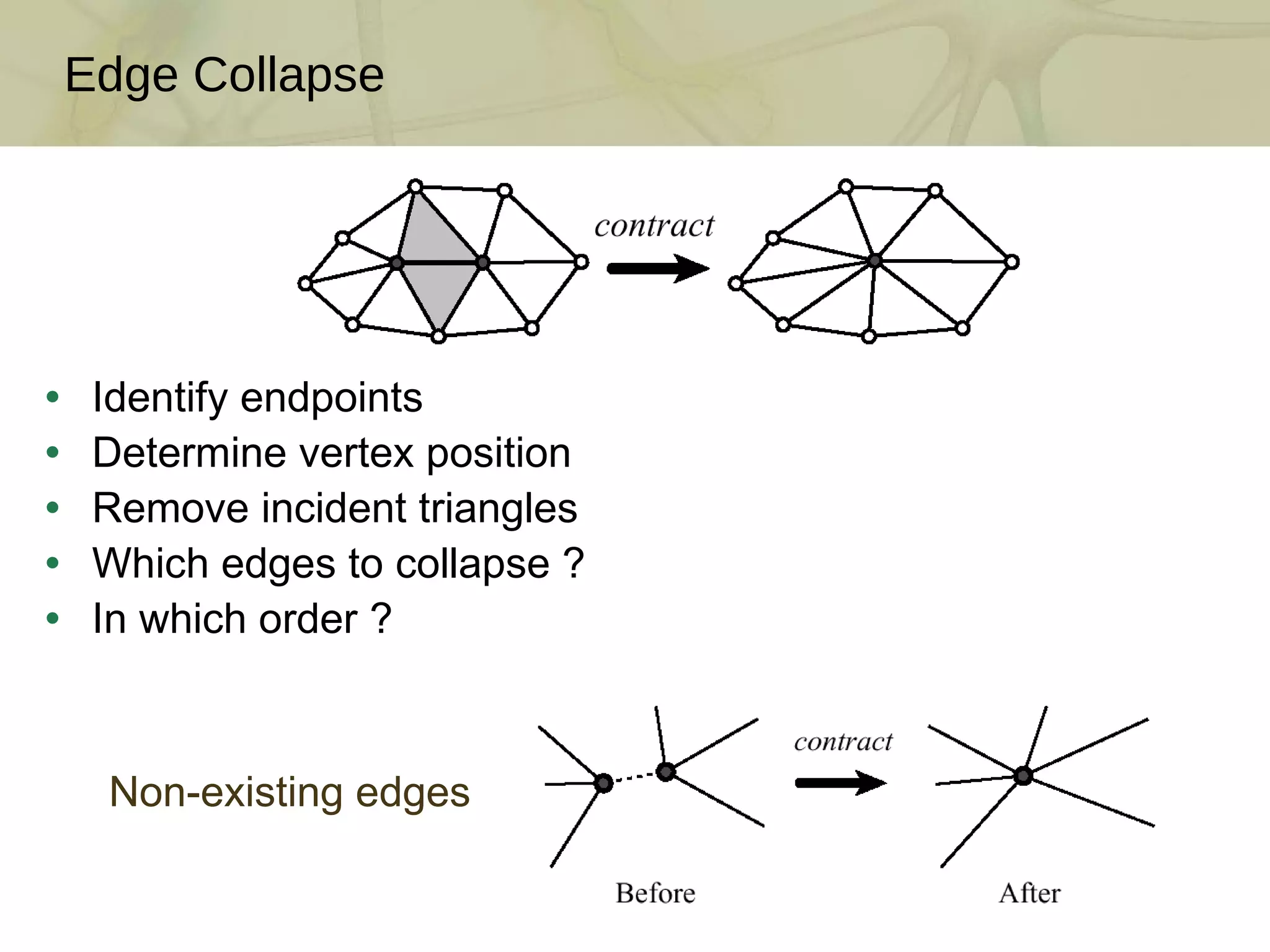

The document discusses techniques for structured lighting projector calibration and surface reconstruction from multiple point cloud scans, emphasizing the importance of merging different camera views to create a complete object representation. It outlines methods for point cloud registration, mesh processing, and error minimization, including algorithms like the Iterative Closest Point (ICP) and Poisson surface reconstruction. Additionally, it highlights various surface representations and simplification techniques for efficient processing of polygon meshes.


















![[論文紹介] DPSNet: End-to-end Deep Plane Sweep Stereo](https://cdn.slidesharecdn.com/ss_thumbnails/20190212dpsnet-190830151623-thumbnail.jpg?width=640&height=640&fit=bounds)




![Objects as points (CenterNet) review [CDM]](https://cdn.slidesharecdn.com/ss_thumbnails/objectsaspointscenternetreviewcdm-200327113331-thumbnail.jpg?width=640&height=640&fit=bounds)