Download as PDF, PPTX

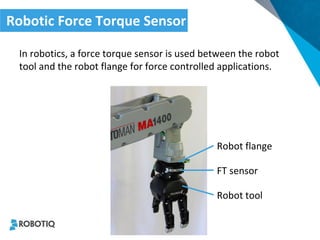
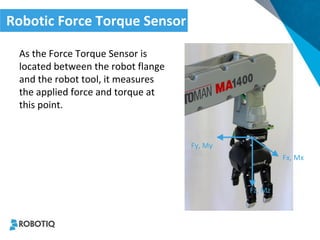
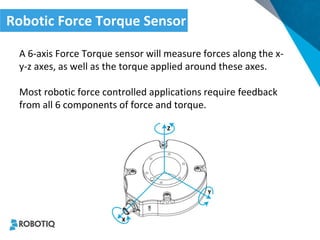
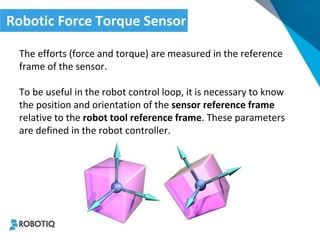
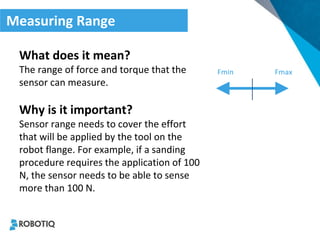
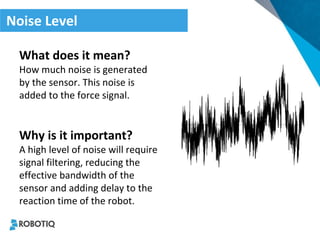
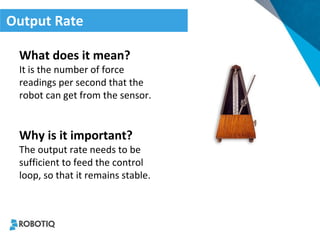
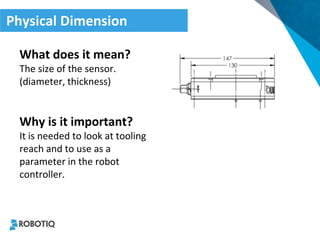



This document introduces force torque sensors, which are used in robotics to measure the applied force and torque between a robot's tool and flange. It discusses the typical specifications of these sensors, including measuring range, resolution, accuracy, repeatability, drift, noise level, output rate, and physical dimensions. Understanding these specifications is important for ensuring the sensor can adequately measure the forces required for the robotic application.