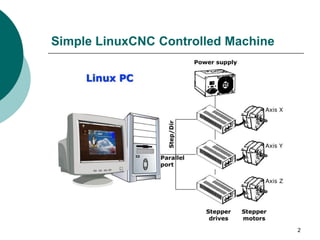
LinuxCNC is open source CNC software that runs on Linux. It provides motion control, I/O control, and multiple graphical user interfaces. LinuxCNC uses a real-time kernel extension called RTAI to ensure precise timing. It is configured using INI, HAL, VAR, TBL, and NML files that define hardware connections, parameters, tools, and communications. The HAL abstraction layer connects LinuxCNC signals to physical hardware pins.











![Configuring LinuxCNC
Sections
[EMC] general information
[DISPLAY] settings related to the graphical user interface
[FILTER] settings input filter programs
[RS274NGC] settings used by the g-code interpreter
[EMCMOT] settings used by the real time motion
controller
[TASK] settings used by the task controller
[HAL] specifies .hal files
[HALUI] MDI commands used by HALUI
[TRAJ] additional settings used by the real time motion
controller
[AXIS_n] individual axis variables
[EMCIO] settings used by the I/O Controller
Example
16](https://image.slidesharecdn.com/linuxcncoverview-140123113227-phpapp02/85/LinuxCNC-16-320.jpg)















![Appendix
software step pulse generation
installing
loadrt stepgen step_type=type0[,type1...]
[ctrl_type=type0[,type1...]] [user_step_type=#,#...]
FUNCTIONS
stepgen.make-pulses (no floating-point)
Generates the step pulses, using information computed
by update-freq. Must be called as frequently as possible, to
maximize the attainable step rate and minimize jitter.
Operates on all channels at once.
stepgen.capture-position (uses floating point)
Captures position feedback value from the high speed code
and makes it available on a pin for use elsewhere in the
system. Operates on all channels at once.
stepgen.update-freq (uses floating point)
Accepts a velocity or position command and converts it into a
form usable by make-pulses for step generation. Operates
on all channels at once.
32](https://image.slidesharecdn.com/linuxcncoverview-140123113227-phpapp02/85/LinuxCNC-32-320.jpg)




























![AXIS
1.
2.
3.
4.
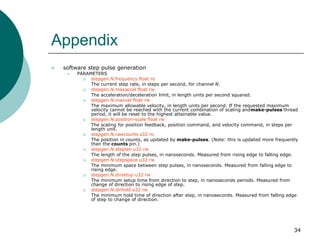
Create an .xml file that contains your
panel description and put it in your
config directory.
Add the PyVCP entry to the [DISPLAY]
section of the ini file with your .xml file
name.
Add the POSTGUI_HALFILE entry to the
[HAL] section of the ini file with the
name of your postgui HAL file name.
Add the links to HAL pins for your panel
in the postgui.hal file to connect your
PyVCP panel to LinuxCNC
63](https://image.slidesharecdn.com/linuxcncoverview-140123113227-phpapp02/85/LinuxCNC-63-320.jpg)


![AXIS
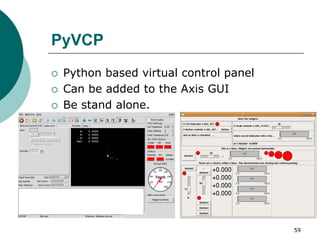
[DISPLAY] section (.ini file)
[HAL] section (.ini file)
PYVCP = spindle.xml
POSTGUI_HALFILE =
spindle_to_pyvcp.hal
links to HAL pins (.hal file)
net spindle-rpm-filtered =>
pyvcp.spindle-speed
66](https://image.slidesharecdn.com/linuxcncoverview-140123113227-phpapp02/85/LinuxCNC-66-320.jpg)