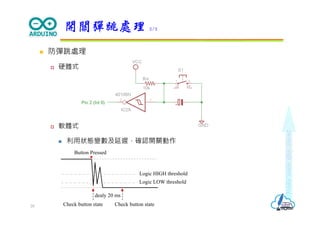
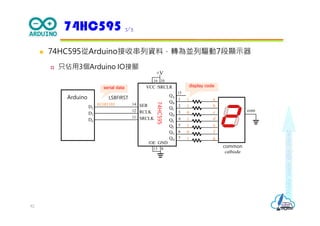
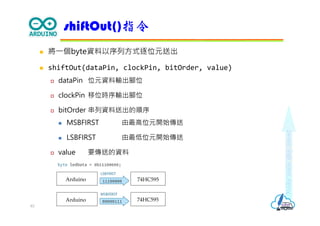
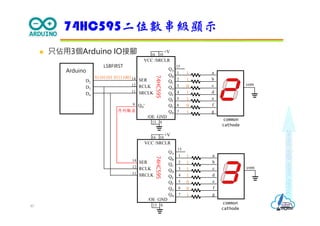
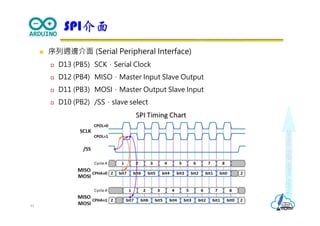
Makeeachdaycount
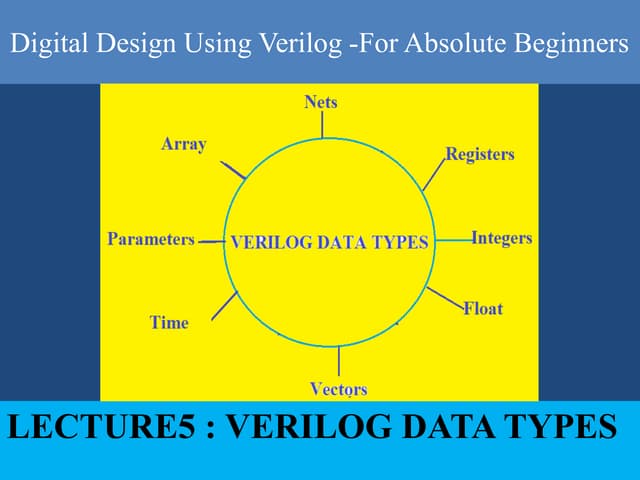
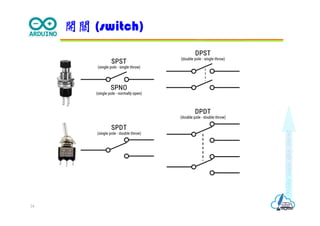
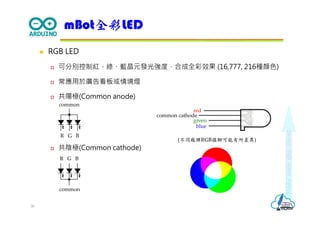
RGB LED
可分別控制紅、綠、藍晶元發光強度,合成全彩效果 (16,777, 216種顏色)
常應用於廣告看板或情境燈
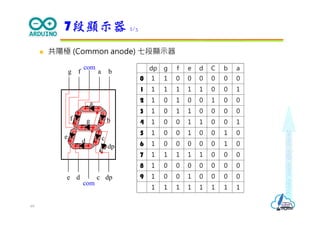
共陽極(Common anode)
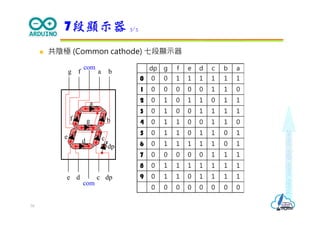
共陰極(Common cathode)
mBot全彩LED
36
red
green
blue
common cathode
R G B
common
R G B
common
(不同廠牌RGB接腳可能有所差異)
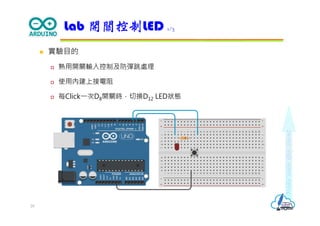
Makeeachdaycount
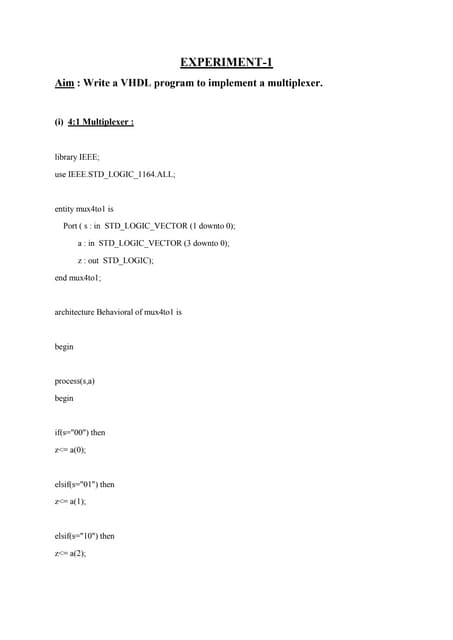
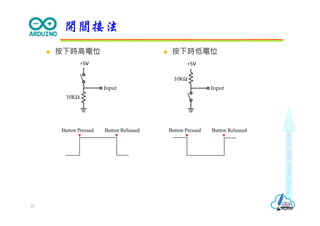
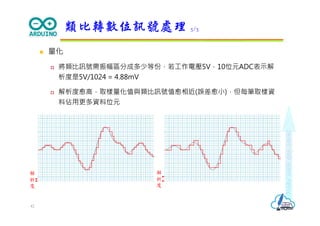
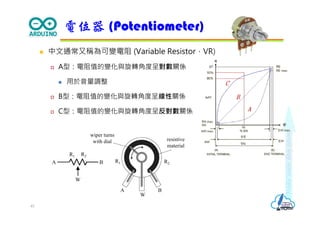
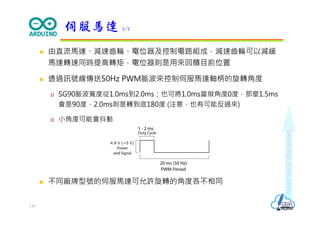
中文通常又稱為可變電阻 (VariableResistor,VR)
A型:電阻值的變化與旋轉角度呈對數關係
用於音量調整
B型:電阻值的變化與旋轉角度呈線性關係
C型:電阻值的變化與旋轉角度呈反對數關係
電位器 (Potentiometer)
45
wiper turns
with dial resistive
material
R1 R2
A B
W
R1 R2
A B
W
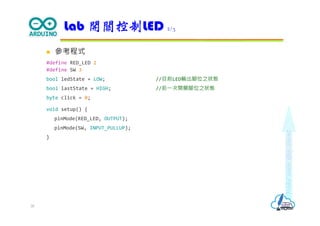
Makeeachdaycount
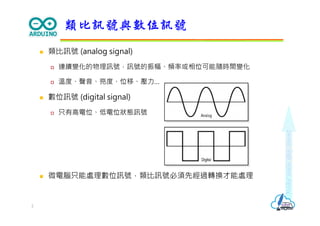
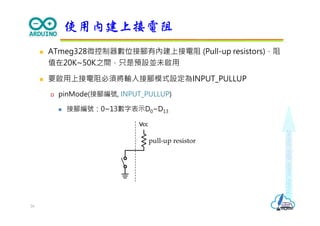
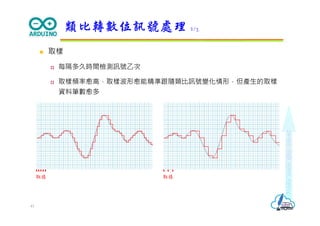
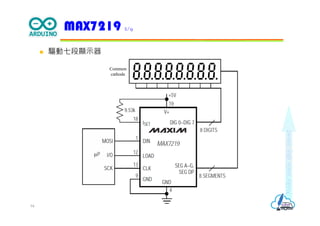
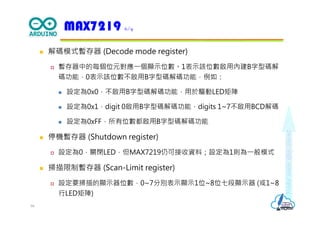
位數資料暫存器 (Digitregister) ,共有8個,分別存放每個七段顯示
器要顯示的資料 (或8*8點矩陣LED的每⼀行資料)
亮度暫存器 (Intensity register)
控制顯示器亮度,數值0(最暗)~15(最亮)
顯示檢測暫存器 (Display-test register),
設定為1時,MAX7219將進入測試模式,所有LED都會被點亮;設定為0,
則為⼀般模式
MAX7219 5/9
97
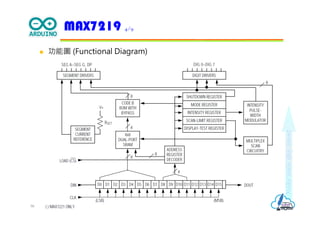
Register Data
Corresponding
Segment Line
D7 D6 D5 D4 D3 D2 D1 D0
DP A B C D E F G
Makeeachdaycount
void loop() {
lcd.print("NKUTE.E."); //在第⼀列顯示NKUT E.E.
for (byte i = 0; i < sizeof(msg)-1; i++) { //在第二列以打字效果顯示hello, arduino!
delay(250);
lcd.setCursor(i, 1);
lcd.write(msg[i]);
}
//閃爍⼀次後清除
delay(1000);
lcd.noDisplay();
delay(1000);
lcd.display();
delay(1000);
lcd.clear();
delay(1000);
}
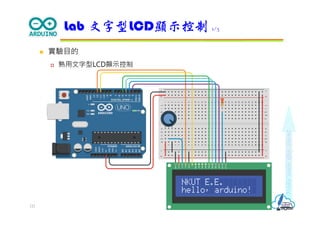
Lab 文字型LCD顯示控制 3/3
123
124.
Makeeachdaycount
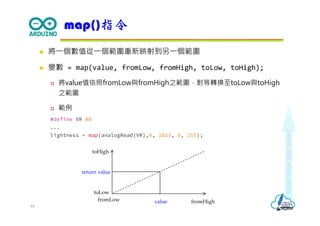
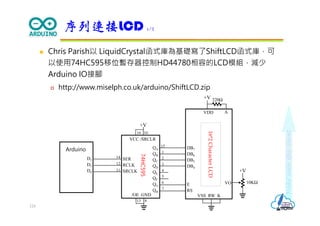
Chris Parish以LiquidCrystal函式庫為基礎寫了ShiftLCD函式庫,可
以使用74HC595移位暫存器控制HD44780相容的LCD模組,減少
Arduino IO接腳
http://www.miselph.co.uk/arduino/ShiftLCD.zip
序列連接LCD 1/2
124
15
1
2
3
4
5
6
7
SER
RCLK
SRCLK
D2
D3
D4
Arduino QA
QB
QC
QD
QE
QF
QG
QH
13 8
16 10
+V
14
12
11
VCC /SRCLR
/OE GND
74HC595
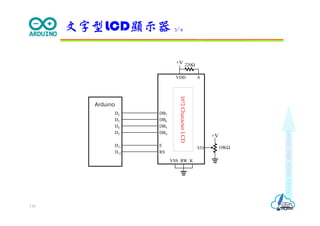
DB7
DB6
DB5
DB4
E
RS
VSS RW K
16*2CharacterLCD
VDD
+V
VO
+V
A
220Ω
10KΩ
125.
Makeeachdaycount
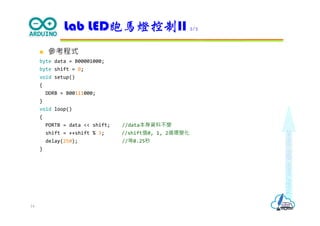
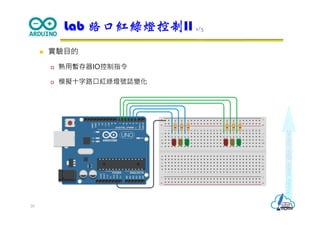
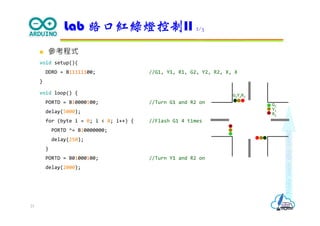
參考程式
#include <ShiftLCD.h>
//initialize the library with the numbers of the interface pins
ShiftLCD lcd(2, 4, 3);
void setup() {
// set up the LCD's number of rows and columns:
lcd.begin(16, 2);
// Print a message to the LCD.
lcd.print("Hello, World!");
}
void loop() {
// set the cursor to column 0, line 1
lcd.setCursor(0, 1);
lcd.print(millis()/1000);
}
序列連接LCD 2/2
125


![Makeeachdaycount
參考程式
byte counter = 0;
byte ledPins[] = {11, 12, 13};
void setup(){
for (byte i = 0; i < 3; i++) {
pinMode(ledPins[i], OUTPUT);
}
}
void loop() {
for (byte i = 0; i < 3; i++) {
digitalWrite(ledPins[i], counter == i);
}
delay(250);
counter = ++counter % 3; //counter值0, 1, 2循環變化
}
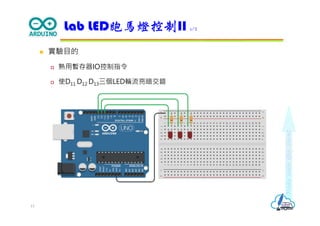
Lab LED跑馬燈控制I 2/2
10](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-10-320.jpg)
![Makeeachdaycount
參考程式
byte rowLEDs[]={5, 6, 7}; //R1, Y1, G1
byte columnLEDs[]={2, 3, 4}; //R2, Y2, G2
void setup(){
for (byte i = 0; i < 3; i++) {
pinMode(rowLEDs[i], OUTPUT);
pinMode(columnLEDs[i], OUTPUT);
}
for (byte i = 0; i < 3; i++) {
digitalWrite(rowLEDs[i], LOW);
digitalWrite(columnLEDs[i], LOW);
}
}
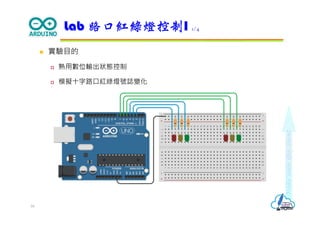
Lab 路口紅綠燈控制I 2/4
17](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-17-320.jpg)
![Makeeachdaycount
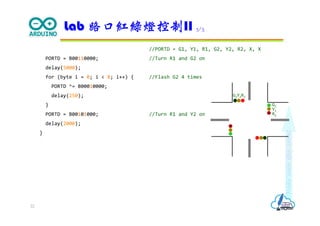
void loop() {
digitalWrite(rowLEDs[2],HIGH); //Turn G1 on
digitalWrite(columnLEDs[0],HIGH); //Turn R2 on
delay(5000);
for (byte i = 0; i < 4; i++) { //Flash G1 4 times
digitalWrite(rowLEDs[2], LOW);
delay(250);
digitalWrite(rowLEDs[2], HIGH);
delay(250);
}
digitalWrite(rowLEDs[2], LOW); //Turn G1 off
digitalWrite(rowLEDs[1], HIGH); //Turn Y1 On
delay(2000);
digitalWrite(rowLEDs[1], LOW); //Turn Y1 Off
digitalWrite(columnLEDs[0],LOW); //Turn R2 off
Lab 路口紅綠燈控制I 3/4
18
G1
Y1
R1
G2Y2R2](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-18-320.jpg)
![Makeeachdaycount
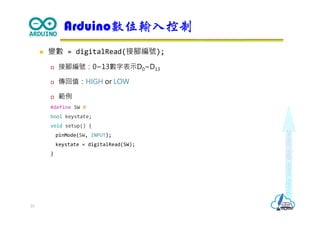
digitalWrite(columnLEDs[2],HIGH); //Turn G2 on
digitalWrite(rowLEDs[0],HIGH); //Turn R1 on
delay(5000);
for (byte i = 0; i < 4; i++) { //Flash G2 4 times
digitalWrite(columnLEDs[2], LOW);
delay(250);
digitalWrite(columnLEDs[2], HIGH);
delay(250);
}
digitalWrite(columnLEDs[2], LOW); //Turn G2 off
digitalWrite(columnLEDs[1], HIGH); //Turn Y2 on
delay(2000);
digitalWrite(columnLEDs[1], LOW); //Turn Y2 off
digitalWrite(rowLEDs[0],LOW); //Turn R1 off
}
Lab 路口紅綠燈控制I 4/4
19
G1
Y1
R1
G2Y2R2](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-19-320.jpg)

![Makeeachdaycount
參考程式
#define BELL 2
#define SW 3
const byte LENGTH = 11;
int note[LENGTH]={659,523,392,523,587,784,587,659,587,392,523}; //音符
int beat[LENGTH]={500,500,500,500,500,1000,500,500,500,500,500}; //節拍
void setup() {
pinMode(SW, INPUT_PULLUP);
pinMode(BELL, OUTPUT);
}
void loop() {
if (digitalRead(SW) == LOW) playBell();
}
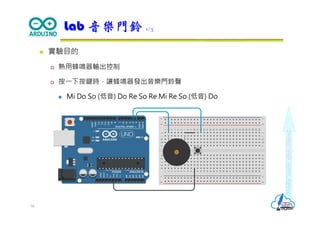
Lab 音樂門鈴 2/3
51](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-51-320.jpg)
![Makeeachdaycount
void playBell(){
for(byte i = 0; i < LENGTH; i++){
tone(BELL, note[i], tempo[i]);
delay(tempo[i]);
}
}
Lab 音樂門鈴 3/3
52](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-52-320.jpg)


![Makeeachdaycount
參考程式
char keypad[4][4] = { //矩陣按鍵
{'1','2','3','A'},
{'4','5','6','B'},
{'7','8','9','C'},
{'*','0','#','D'}};
byte row = 0, col = 0;
byte scan[4] = {B01110000,B10110000,B11010000,B11100000};
void setup() {
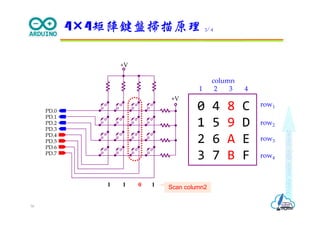
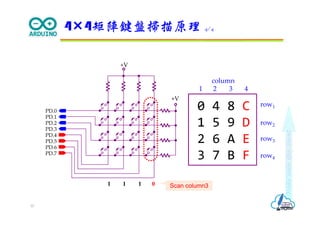
DDRD = B11110000; //D4, D5, D6, D7做為直行掃描輸出
DDRB = B00000000; //D8, D9, D10, D11做為橫列按鍵檢測輸入
Serial.begin(9600);
}
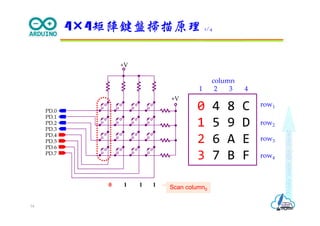
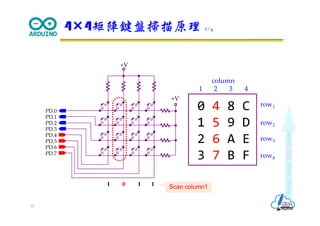
Lab 矩陣鍵盤輸入 2/4
59](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-59-320.jpg)
![Makeeachdaycount
void loop() {
for (col = 0; col < 4; col++){
PORTD = scan[col]; //送出直行掃描碼
byte k = PINB & B00001111; //讀取D8, D9, D10, D11值
switch (k){
case 14:
row = 3;
Serial.println(keypad[row][col]);
break;
case 13:
row = 2;
Serial.println(keypad[row][col]);
break;
case 11:
row = 1;
Serial.println(keypad[row][col]);
break;
Lab 矩陣鍵盤輸入 3/4
60](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-60-320.jpg)
![Makeeachdaycount
case 7:
row = 0;
Serial.println(keypad[row][col]);
break;
}
delay(25);
}
}
Lab 矩陣鍵盤輸入 4/4
61](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-61-320.jpg)
![Makeeachdaycount
參考程式
char keypad[4][4] = { //矩陣按鍵
{'1','2','3','A'},
{'4','5','6','B'},
{'7','8','9','C'},
{'*','0','#','D'}};
byte row = 0, col = 0;
byte scan[4] = {B01110000,B10110000,B11010000,B11100000};
char password[4] = {'3','4','6','6'};
byte state = 0;
void setup() {
DDRD = B11110000; //D4~D7做為直行掃描輸出
DDRB = B00110000; //D8~D11做為橫列按鍵檢測輸入; D12,D13開鎖指示鐙
Serial.begin(9600);
}
Lab 密碼鎖 2/5
64](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-64-320.jpg)
![Makeeachdaycount
void loop() {
for (col = 0; col < 4; col++){
PORTD = scan[col]; //送出直行掃描碼
byte k = PINB & B00001111; //讀取D8, D9, D10, D11值
switch (k){
case 14:
row = 3;
check();
Serial.println(keypad[row][col]);
break;
case 13:
row = 2;
check();
Serial.println(keypad[row][col]);
break;
Lab 密碼鎖 3/5
65](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-65-320.jpg)
![Makeeachdaycount
case 11:
row = 1;
check();
Serial.println(keypad[row][col]);
break;
case 7:
row = 0;
check();
Serial.println(keypad[row][col]);
break;
}
delay(25);
}
Lab 密碼鎖 4/5
66](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-66-320.jpg)
![Makeeachdaycount
if (state == 4) {
digitalWrite(12, HIGH);
digitalWrite(13, LOW);
delay(5000);
state = 0;
}
else {
digitalWrite(12, LOW);
digitalWrite(13, HIGH);
}
}
void check(){
if (keypad[row][col] == password[state])
state++;
else
state = 0;
}
Lab 密碼鎖 5/5
67](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-67-320.jpg)

![Makeeachdaycount
參考程式
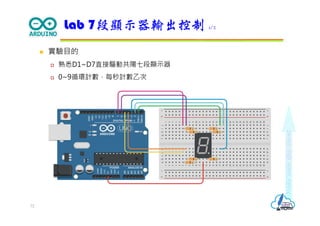
byte disp_code[10] = { //g,f,e,d,c,b,a,X
B10000000, B11110010, B01001000, B01100000, B00110010,
B00100100, B00000110, B11110000, B00000000, B00110000
};
void setup() {
DDRD = B11111110; //D1~D7輸出接7段顯示器a~g
}
// the loop function runs over and over again forever
void loop() {
for (byte i = 0; i < 10; i++) {
PORTD = disp_code[i];
delay(1000);
}
}
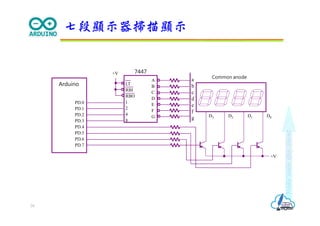
Lab 7段顯示器輸出控制 2/2
73](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-73-320.jpg)


![Makeeachdaycount
參考程式
byte bcd_code[10] = {
0, 1, 2, 3, 4,
5, 6, 7, 8, 9
};
void setup() {
DDRB = B00001111; //D8~D11輸出接CD4511 BCD輸入
}
void loop() {
for (byte i = 0; i < 10; i++) {
PORTB = disp_code[i];
delay(1000);
}
}
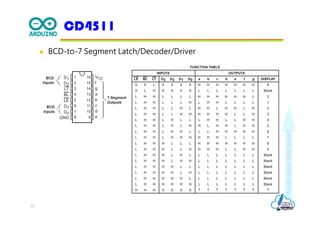
Lab CD4511驅動7段顯示器 2/2
77](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-77-320.jpg)


![Makeeachdaycount
參考程式
const byte dataPin = 2;
const byte latchPin = 3;
const byte clockPin = 4;
byte count = 0;
byte display_code[10] = { //_abcdefg
B01111110, B00110000, B01101101, B01111001, B00110011,
B01011011, B01011111, B01110000, B01111111, B01110011
};
void setup() {
pinMode(dataPin, OUTPUT); //D2~D4輸出接74HC595輸入
pinMode(latchPin, OUTPUT);
pinMode(clockPin, OUTPUT);
}
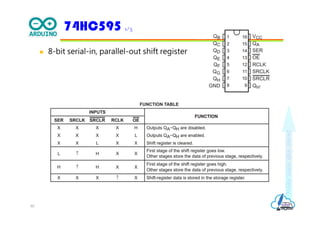
Lab 74HC595驅動7段顯示器 2/3
85](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-85-320.jpg)
![Makeeachdaycount
參考程式
void loop() {
digitalWrite(latchPin, LOW);
shiftOut(dataPin, clockPin, LSBFIRST, display_code[count]);
digitalWrite(latchPin, HIGH);
delay(1000);
count = ++count % 10; //count值0, 1, 2, ..., 9循環變化
}
Lab 74HC595驅動7段顯示器 3/3
86](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-86-320.jpg)

![Makeeachdaycount
參考程式
const byte dataPin = 2;
const byte latchPin = 3;
const byte clockPin = 4;
byte count = 0;
byte display_code[10] = { //_abcdefg
B01111110, B00110000, B01101101, B01111001, B00110011,
B01011011, B01011111, B01110000, B01111111, B01110011
};
void setup() {
pinMode(dataPin, OUTPUT); //D2~D4輸出接74HC595輸入
pinMode(latchPin, OUTPUT);
pinMode(clockPin, OUTPUT);
}
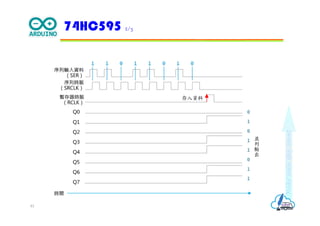
Lab 74HC595串級驅動7段顯示器 2/3
89](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-89-320.jpg)
![Makeeachdaycount
參考程式
void loop() {
digitalWrite(latchPin, LOW);
shiftOut(dataPin, clockPin, LSBFIRST, display_code[count]);
digitalWrite(latchPin, HIGH);
delay(1000);
count = ++count % 10; //count值0, 1, 2, ..., 9循環變化
}
Lab 74HC595串級驅動7段顯示器 3/3
90](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-90-320.jpg)





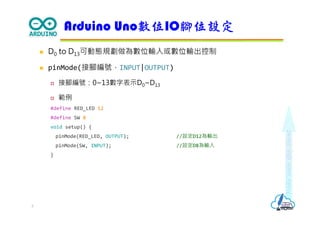
![Makeeachdaycount
byte symbol[8] = {0x0C, 0x1E, 0x3E, 0x7C, 0x7C, 0x03E, 0x1E, 0x0C};
0
0
1
1
0
0
0
0
Lab MAX7219驅動點矩陣LED 2/4
106
低位元
高位元
0
1
1
1
1
0
0
0
0
1
1
1
1
1
0
0
0
0
1
1
1
1
1
0
0
0
1
1
1
1
1
0
0
1
1
1
1
1
0
0
0
1
1
1
1
0
0
0
0
0
1
1
0
0
0
0
0x0C 0x1E 0x3E 0x7C 0x7C 0x3E 0x1E 0x0C
第1行 第8行
第1列
第8列](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-106-320.jpg)
![Makeeachdaycount
#include <SPI.h> //引用SPI程式庫
byte symbol[8] = {0x0C, 0x1E, 0x3E, 0x7C, 0x7C, 0x03E, 0x1E, 0x0C};
//定義MAX7219 暫存器
const byte NOOP = 0x0; //不運作
const byte DECODEMODE = 0x9; //解碼模式
const byte INTENSITY = 0xA; //顯示強度
const byte SCANLIMIT = 0xB; //掃描限制
const byte SHUTDOWN = 0xC; //停機
const byte DISPLAYTEST = 0xF; //顯示器檢測
void max7219(byte reg, byte data) { //設定MAX7219暫存器資料的自訂函數
digitalWrite (SS, LOW);
SPI.transfer (reg);
SPI.transfer (data);
digitalWrite (SS, HIGH);
}
Lab MAX7219驅動點矩陣LED 3/4
107](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-107-320.jpg)
![Makeeachdaycount
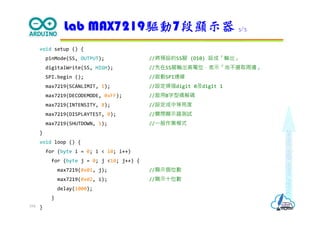
void setup () {
pinMode(SS, OUTPUT); //將預設的SS腳(數位 10)設成「輸出」
digitalWrite(SS, HIGH); //先在SS腳輸出高電位,表示「尚不選取周邊」
SPI.begin (); //啟動SPI連線
max7219 (SCANLIMIT, 7); //設定掃描8行
max7219 (DECODEMODE, 0); //不使用B字型碼解碼
max7219 (INTENSITY, 8); //設定成中等亮度
max7219 (DISPLAYTEST, 0); //關閉顯示器測試
max7219 (SHUTDOWN, 1); //關閉停機模式
}
void loop () {
for (byte i = 0; i < 8; i++) {
max7219 (i + 1, symbol[i]); //顯示自訂圖像
}
}
Lab MAX7219驅動點矩陣LED 4/4
108](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-108-320.jpg)






![Makeeachdaycount
參考程式
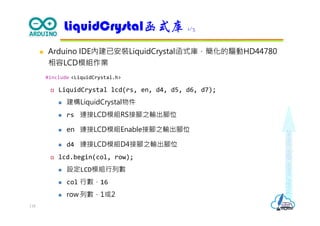
#include <LiquidCrystal.h>
const byte rs = 12, en = 11, d4 = 5, d5 = 4, d6 = 3, d7 = 2;
char msg[] = "hello, arduino!";
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
void setup() {
lcd.begin(16, 2);
}
Lab 文字型LCD顯示控制 2/3
122](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-122-320.jpg)
![Makeeachdaycount
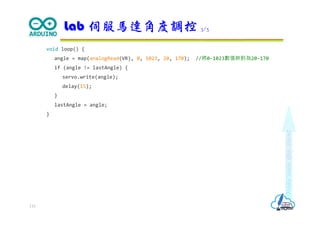
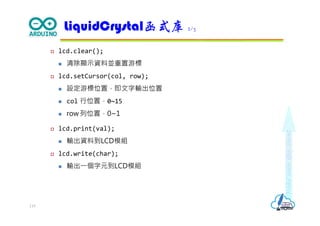
void loop() {
lcd.print("NKUT E.E."); //在第⼀列顯示NKUT E.E.
for (byte i = 0; i < sizeof(msg)-1; i++) { //在第二列以打字效果顯示hello, arduino!
delay(250);
lcd.setCursor(i, 1);
lcd.write(msg[i]);
}
//閃爍⼀次後清除
delay(1000);
lcd.noDisplay();
delay(1000);
lcd.display();
delay(1000);
lcd.clear();
delay(1000);
}
Lab 文字型LCD顯示控制 3/3
123](https://image.slidesharecdn.com/arduino04-180709112327/85/Arduino-IO-123-320.jpg)





















![[嵌入式系統] 嵌入式系統進階](https://cdn.slidesharecdn.com/ss_thumbnails/advembedded-150613071653-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)