Downloaded 64 times
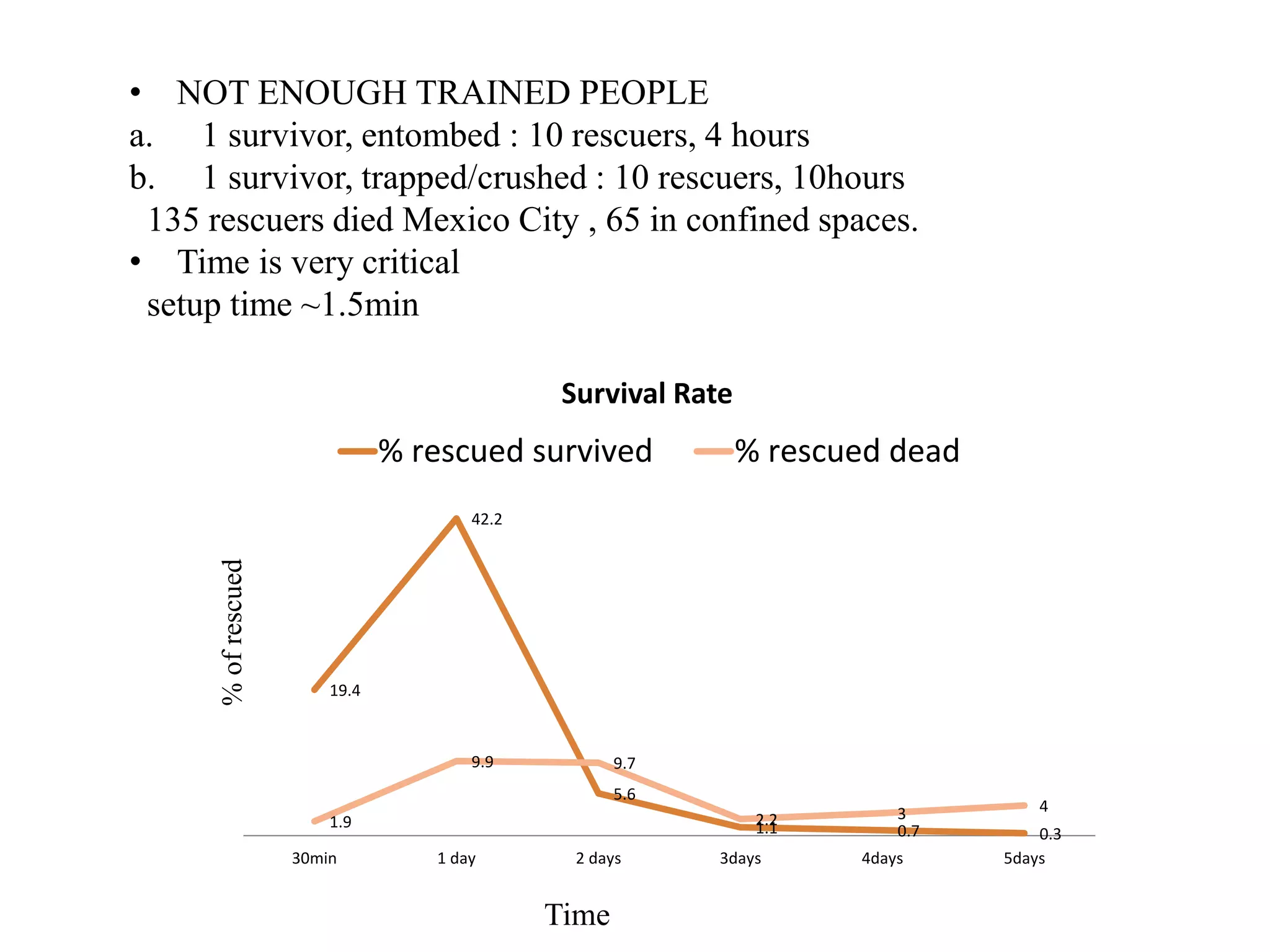
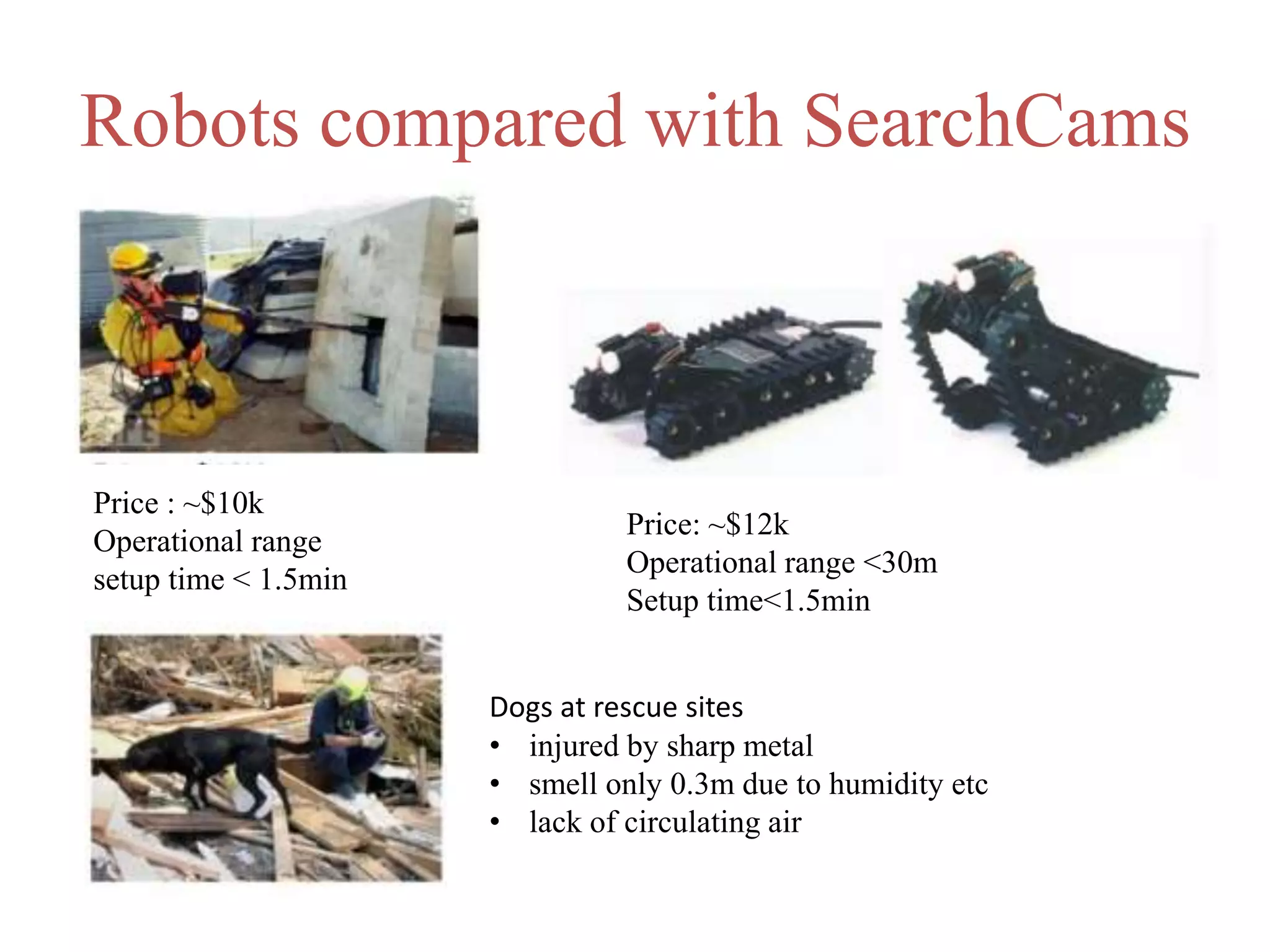
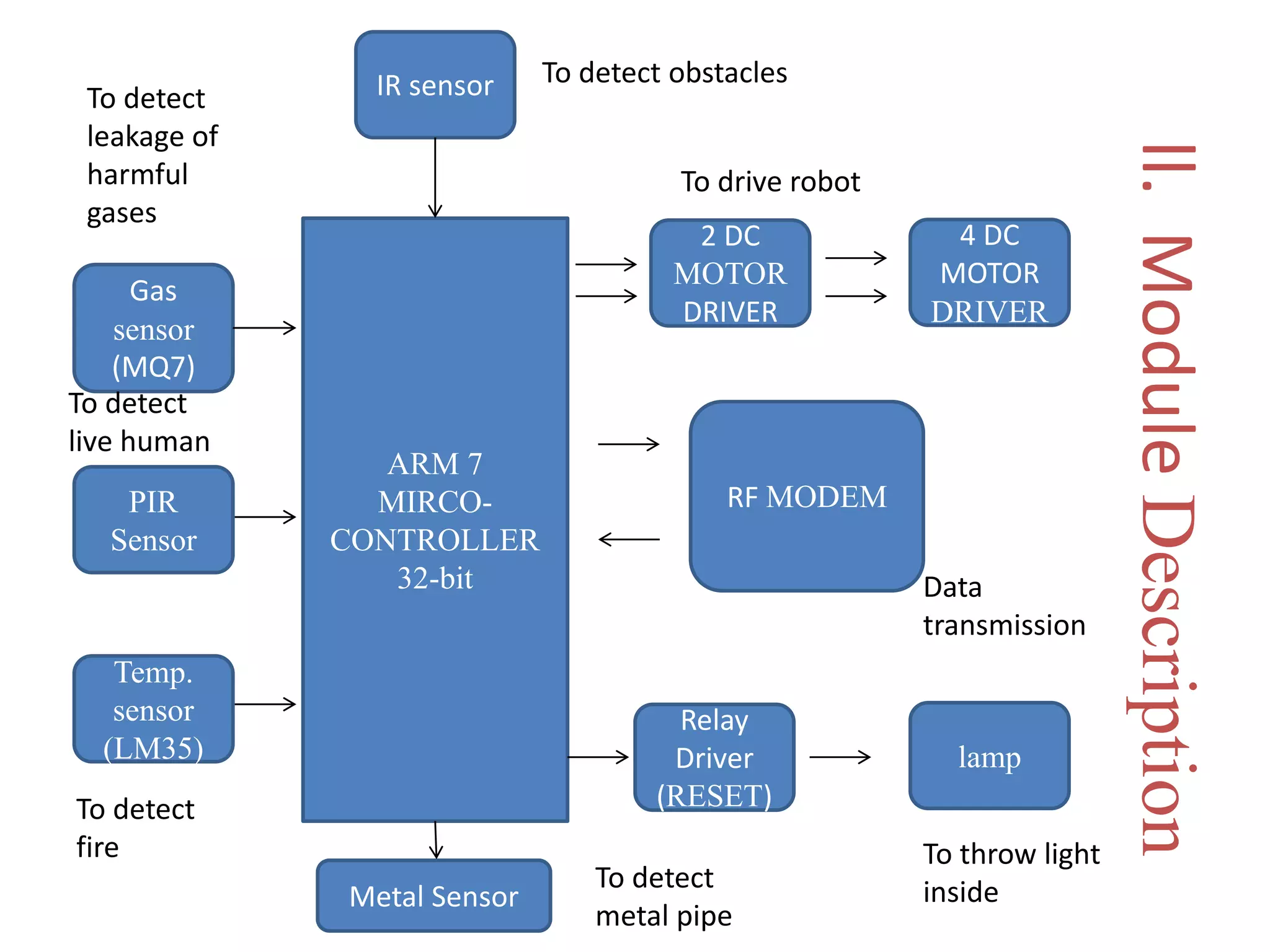
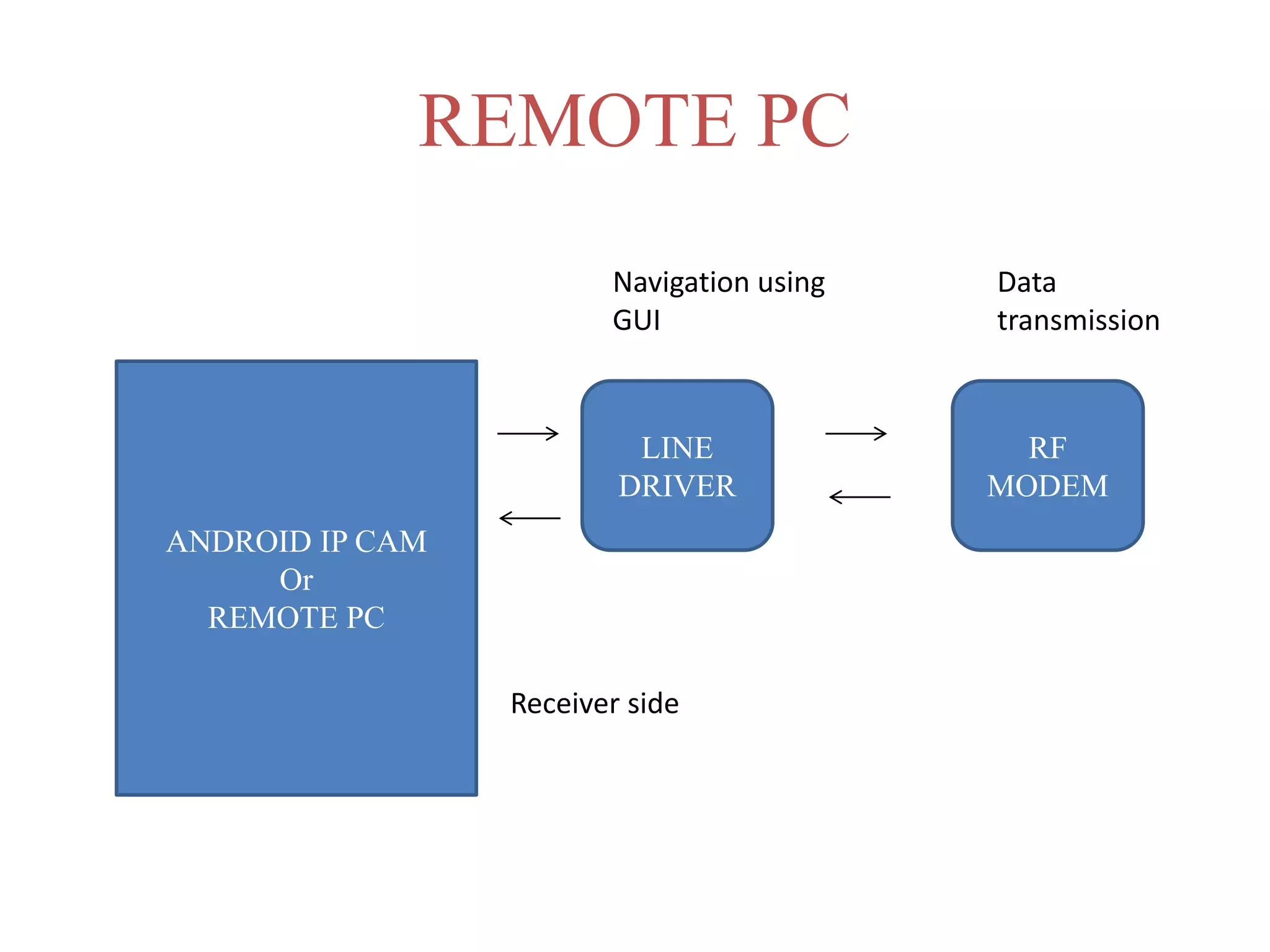
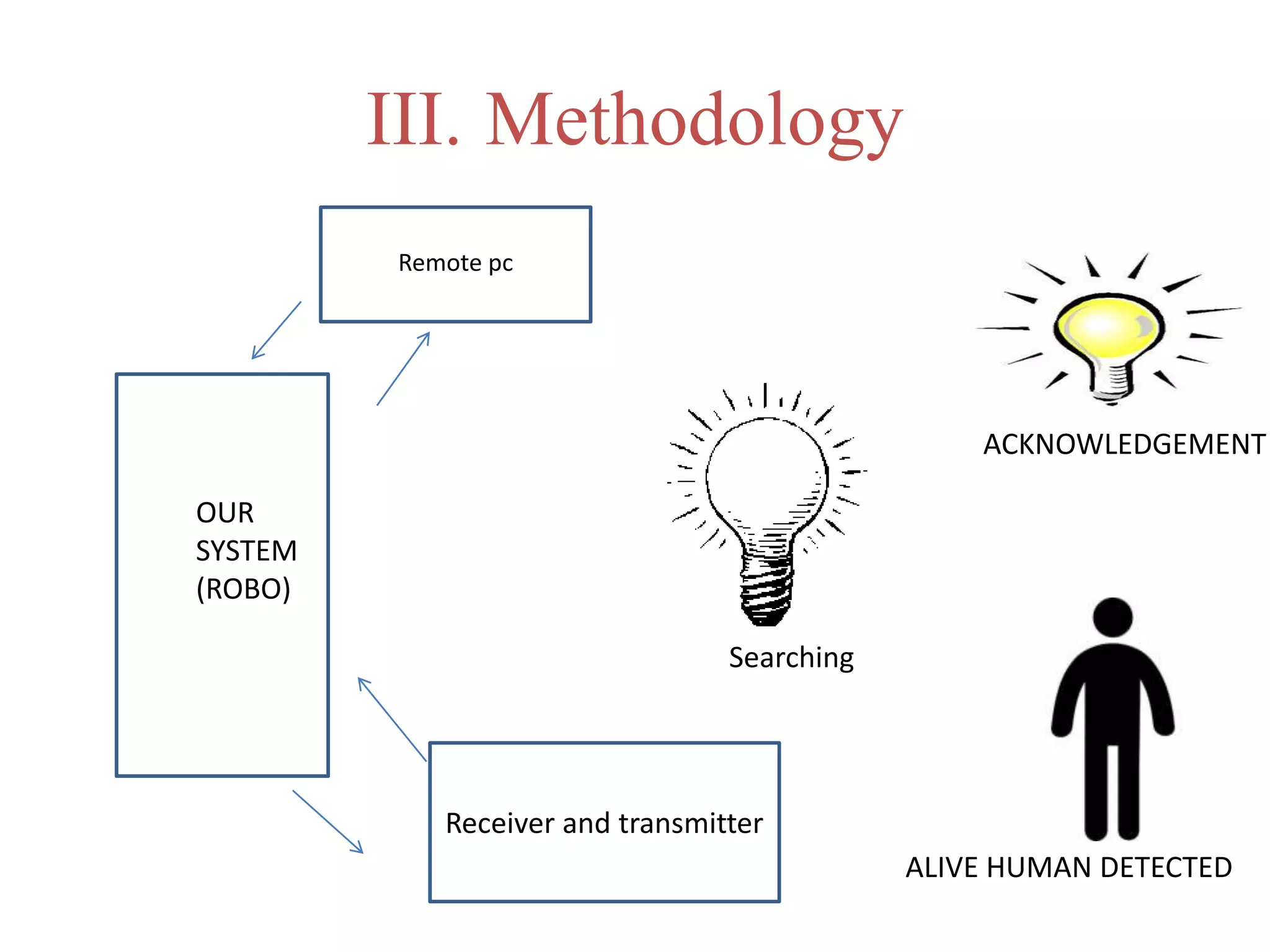


The document details the design and capabilities of a cost-effective rescue robot, aimed at assisting in urban search and rescue operations to locate and recover individuals in hazardous environments. The robot, exemplified by 'Daksh', features enhancements such as improved materials for lightness and durability, advanced mobility, and integration with UAV technology for better operational range. Additionally, the system utilizes multiple sensors for increased reliability and monitoring, contributing to enhanced survival rates in rescue scenarios.