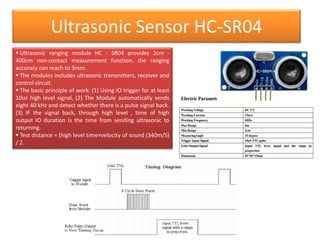
This document describes the design of an ultrasonic sensor based radar prototype. It uses an Arduino Uno microcontroller connected to an HC-SR04 ultrasonic sensor and SG-90 servo motor. The ultrasonic sensor measures distance and the servo motor rotates the sensor to simulate radar scanning. Programming in Arduino sends sensor readings over serial to a Processing visualization program to display a real-time radar screen. The prototype functions as sonar rather than true radar since it uses sound waves instead of radio waves, but demonstrates the basic principles of a rotating sensor radar system.