Downloaded 182 times




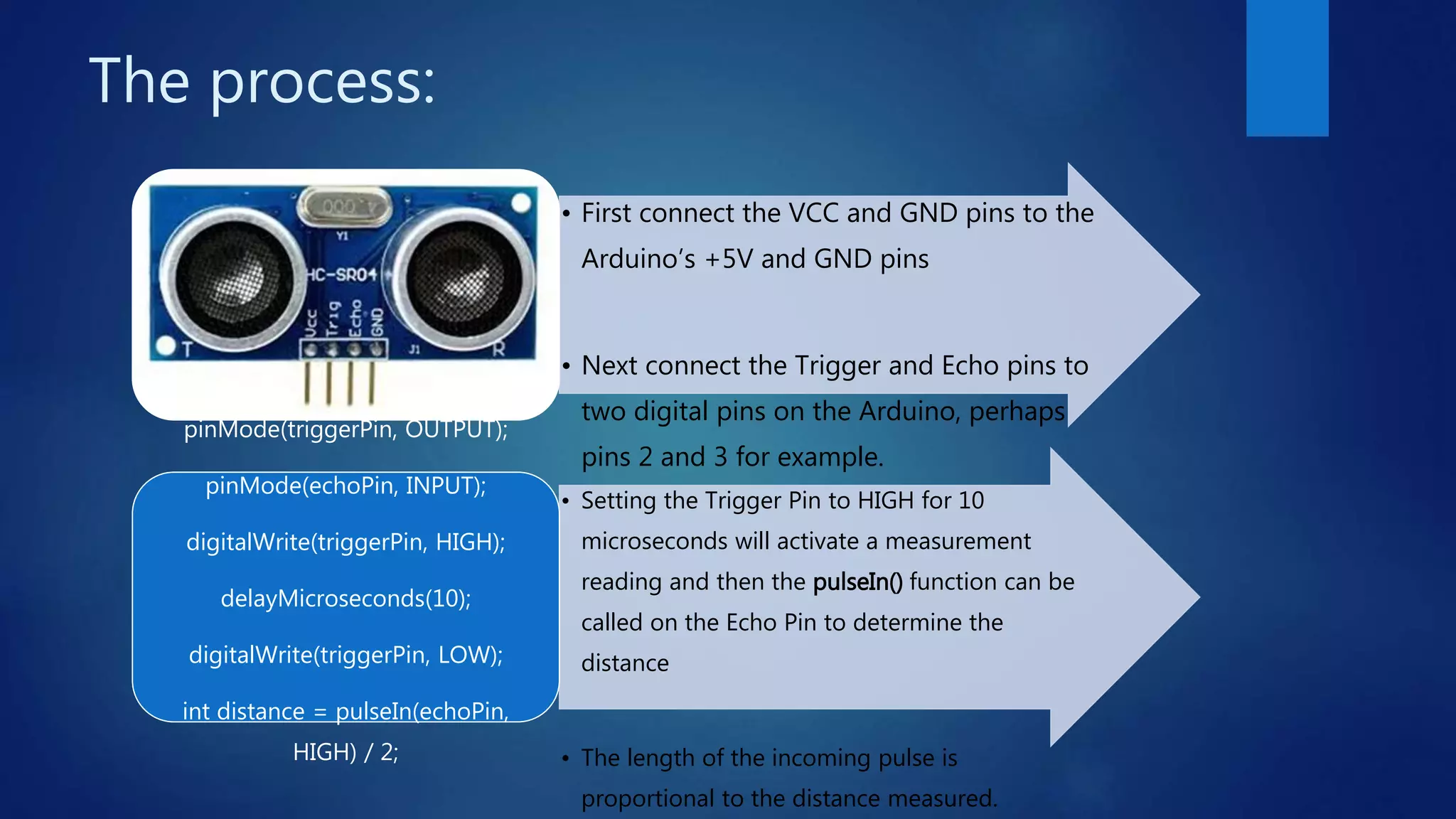

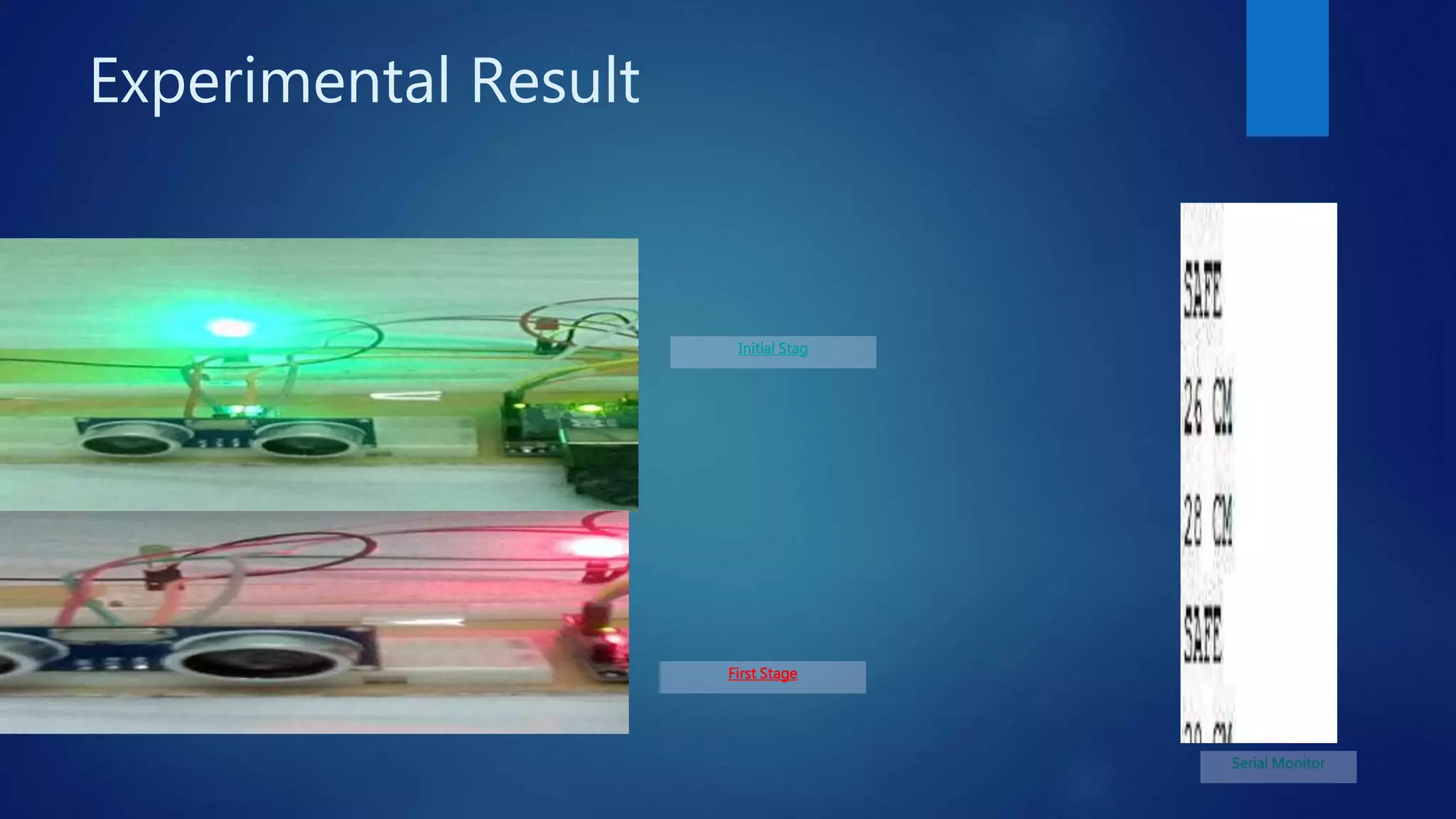





The document outlines a project for reverse car parking utilizing Arduino and ultrasonic sensors to improve parking efficiency and safety. It details the necessary equipment, the conceptual framework, coding processes, and potential future applications. Additionally, it emphasizes goals such as reducing parking difficulties and the project's adaptability for various vehicles and automatic systems.







































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)

