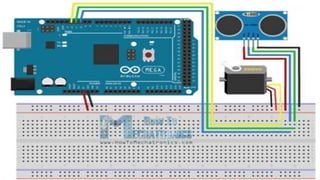
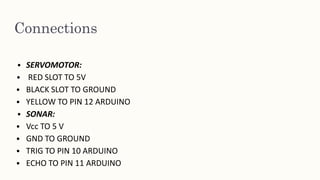
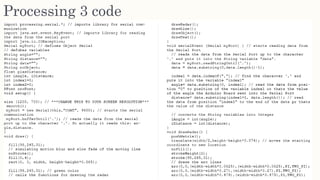
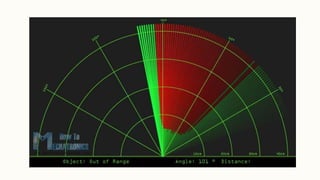
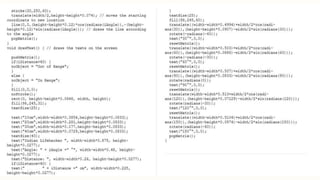
This document provides a progress report on developing a radar detector using Arduino. The goal is to create a rangefinder device that can measure distance from 3cm to 40cm using an ultrasonic sensor controlled by a servo motor. The theoretical approach, hardware used, software used, circuit diagram, code for Arduino and Processing 3, and current progress are described. The device is able to detect distance and the angle of detection is planned to be increased by adding a second ultrasonic sensor. Future additions may include connecting to a smartphone via Bluetooth and developing a mobile app.