This document summarizes the design, modeling, components, and control strategy of a quadcopter unmanned aerial vehicle. Key aspects include:
1) It uses four propellers powered by brushless DC motors for vertical take-off and landing, with yaw, roll, and pitch control achieved by varying motor speeds.
2) An IMU, microcontroller, and PID controllers provide attitude estimation and motor control.
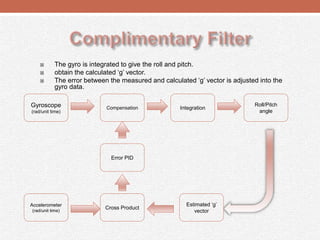
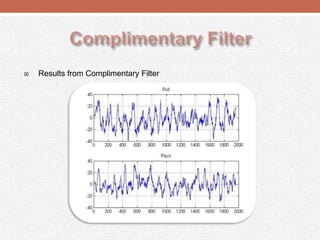
3) A complementary filter fuses gyroscope and accelerometer data to estimate orientation with drift correction.
4) Wireless transmission of sensor data and live video enable remote control and monitoring of flight.