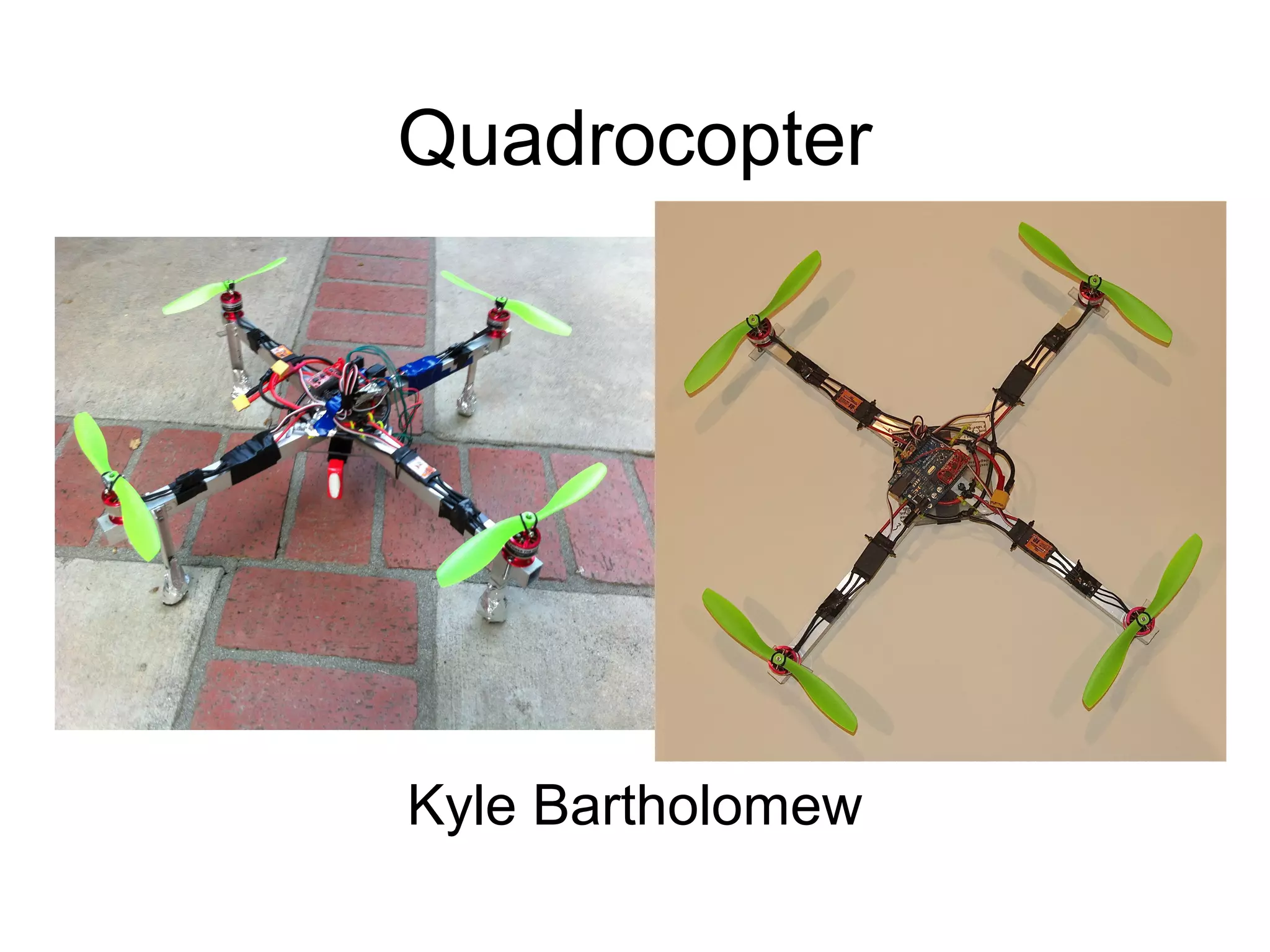
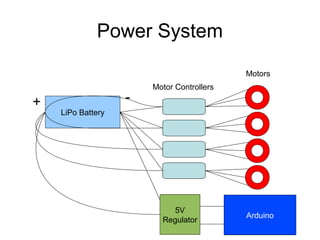
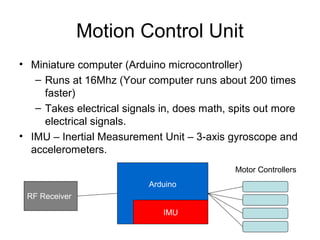
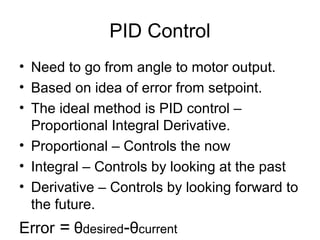
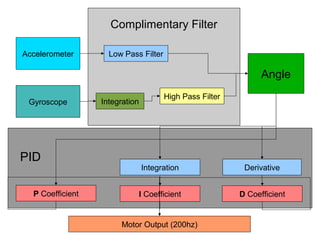
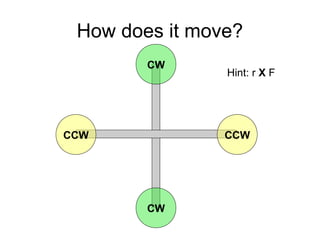
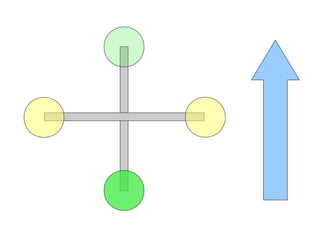
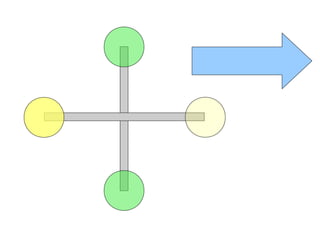
A quadrocopter has four rotors, with two spinning clockwise and two counterclockwise to cancel out torque. A motion control unit uses sensors like gyroscopes and accelerometers along with a complimentary filter and PID control to stabilize the copter without human control. The copter is powered by lithium polymer batteries supplying energy to brushless motors controlled by an Arduino microcontroller running the motion control software.