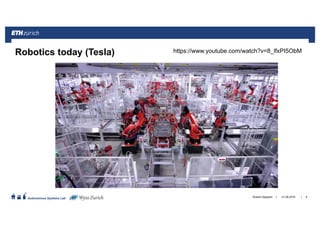
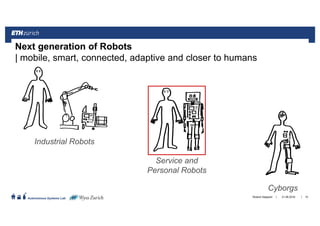
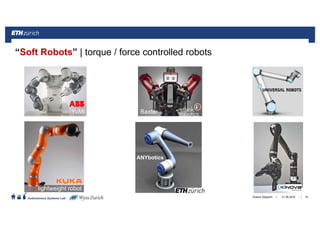
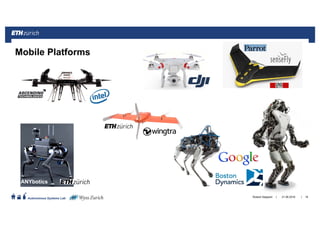
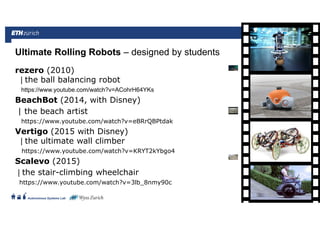
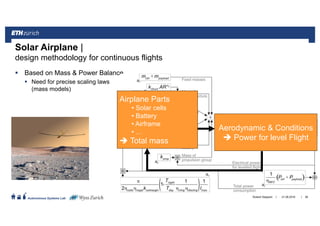
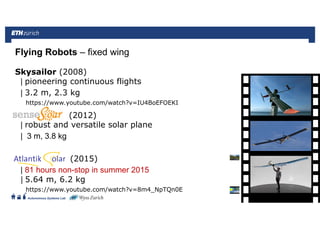
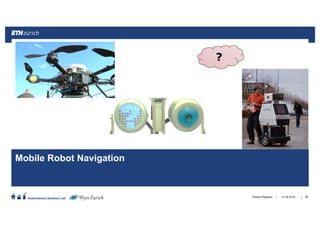
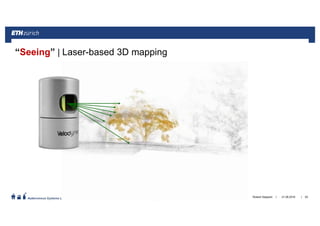
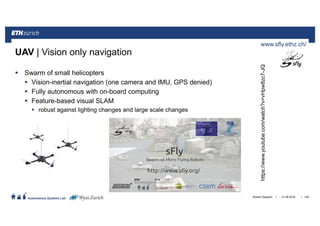
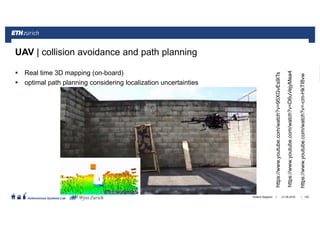
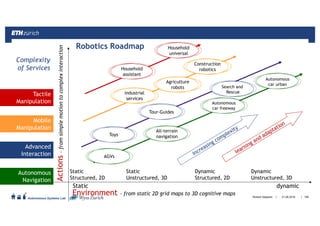
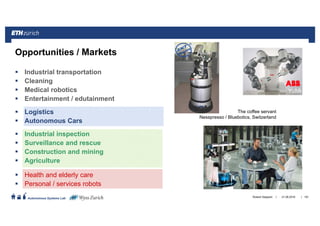
The document discusses trends in robotics and provides examples of robot systems developed by ETH Zurich's Autonomous Systems Lab. It summarizes technologies disrupting industries like microelectronics, computing, and robotics. It then highlights examples of mobile robots, aerial vehicles, and navigation systems created at the lab. It concludes with potential application fields for robotics and Zurich's role as a hub for robotics research.