1 | Pa g e
Applied Robotics
For Engineering Students of B.Tech./BE Courses
PREPARED By- Dr. Mohd Aslam (Ph.D. in
Mechanical Engineering)
COURSE OUTCOMES: EXPLAIN THE VARIOUS TYPES OF
INDUSTRIAL, FIELD AND SERVICE ROBOTS AND THEIR
CHARACTERISTICS AND CAPABILITIES
Sharad Institute of Technology College of Engineering Yadrav, Ichalkaranji,
Kolhapur, Maharashtra-416121
2.
2 | Pa g e
Contents
Chapters Pages
1. APPLICATIONS OF ROBOTS IN INDUSTRIES 1-49
1.1 Introduction of robotics-Overview 5
1.1.1 Robotics Definition 5
1.1.2 Advantages and Disadvantages of Robotics 5
1.1.3 Applied Robotics Definition 5
1.1.4 LAWS OF ROBOTICS: Isaac Asimov's "Three Laws of Robotics" 6
1.2 A short history of industrial Robots 7
1.2.1 Robotics-Philosophyical Considerations 7
1.2.2 Generation of Robots 7
1.2.3 A short history of industrial Robots 9
1.3 Applications of robots in: Welding 10
1.3.1 Applications of robots in: Welding 10
1.3.2 Types of Robots used in welding Industry 12
1.3.3 Year wise development of robot in welding industry 14
1.3.4 Summary of Key Milestones in Robotic Welding Development: 16
1.4 Car body assembly 16
1.4.1 Summary of Key Milestones in Robotic Car Body Assembly and
Painting
16
1.5 Painting 17
1.5.1 Popular Robots Used in Painting Applications 17
1.6 Applications of robots in Machining 18
1.7 Material transfer-Kinematics and Mechanism review 20
1.7.1 Applications of Robots in Material Transfer: Kinematics and
Mechanism Review
20
1.7.2 Kinematics and Mechanisms in Robotic Material Transfer 21
1.7.3 History of Robots 24
1.7.4 Objective of using industrial robots 25
1.7.5 Advantages and Disadvantages of robots 26
1.7.6 Robots kinematic control 26
1.7.6.1 Robot Arm Kinematics 26
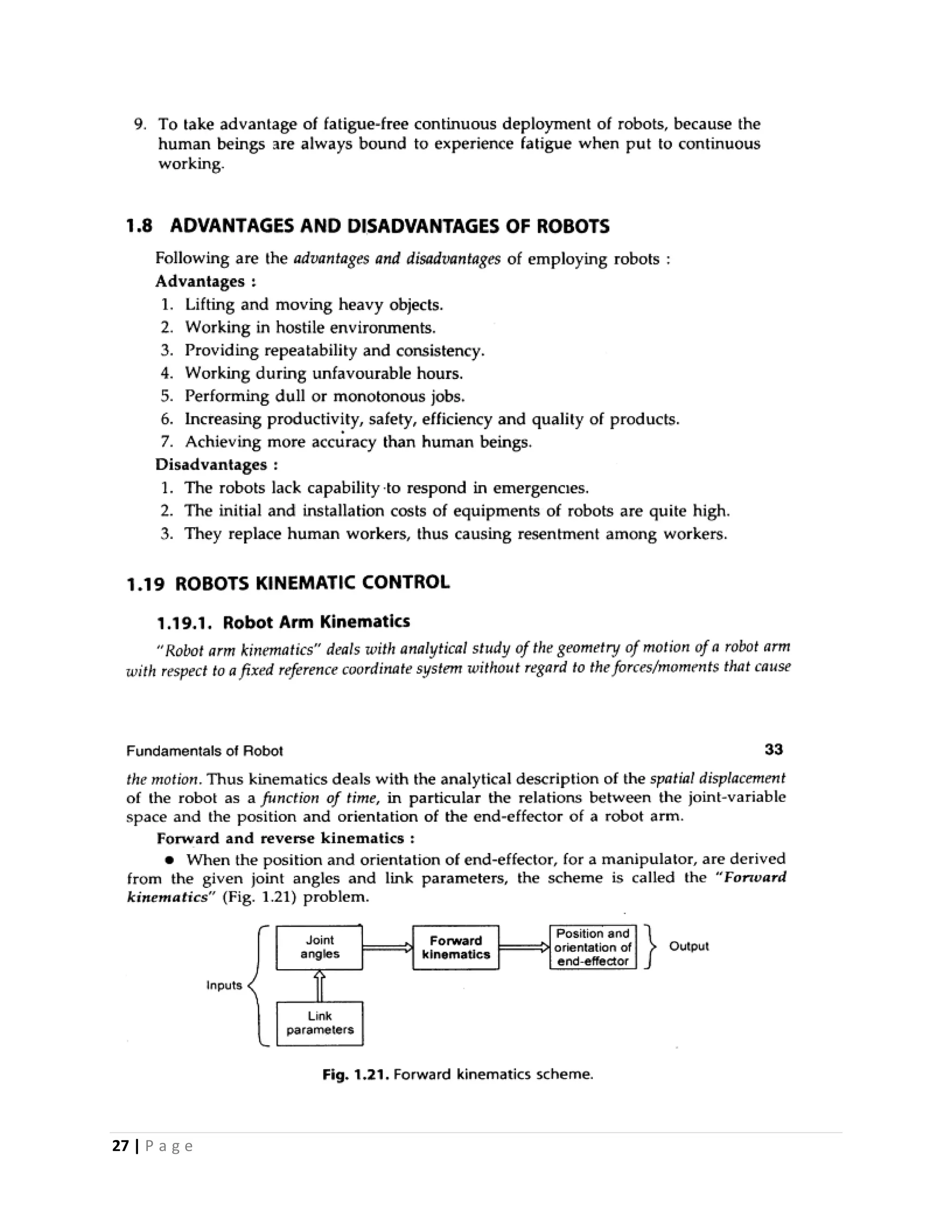
1.7.6.2 Forward and reverse kinematics 26
1.8 Task Descriptions 27
1.8.1 Task Descriptions in robotics 27
1.9 Teaching and programming 33
1.9.1 Teaching and Programming in Robots 33
1.9.2 Teaching Robots 33
1.9.3 Programming Robots 34
3.
3 | Pa g e
1.9.4 Teaching Robots Using AI and Machine Learning 35
1.9.5 Key Methods for Teaching and Programming Robots 35
1.10 End Effectors 36
1.10.1 Definition 36
1.10.2 General Aspects 37
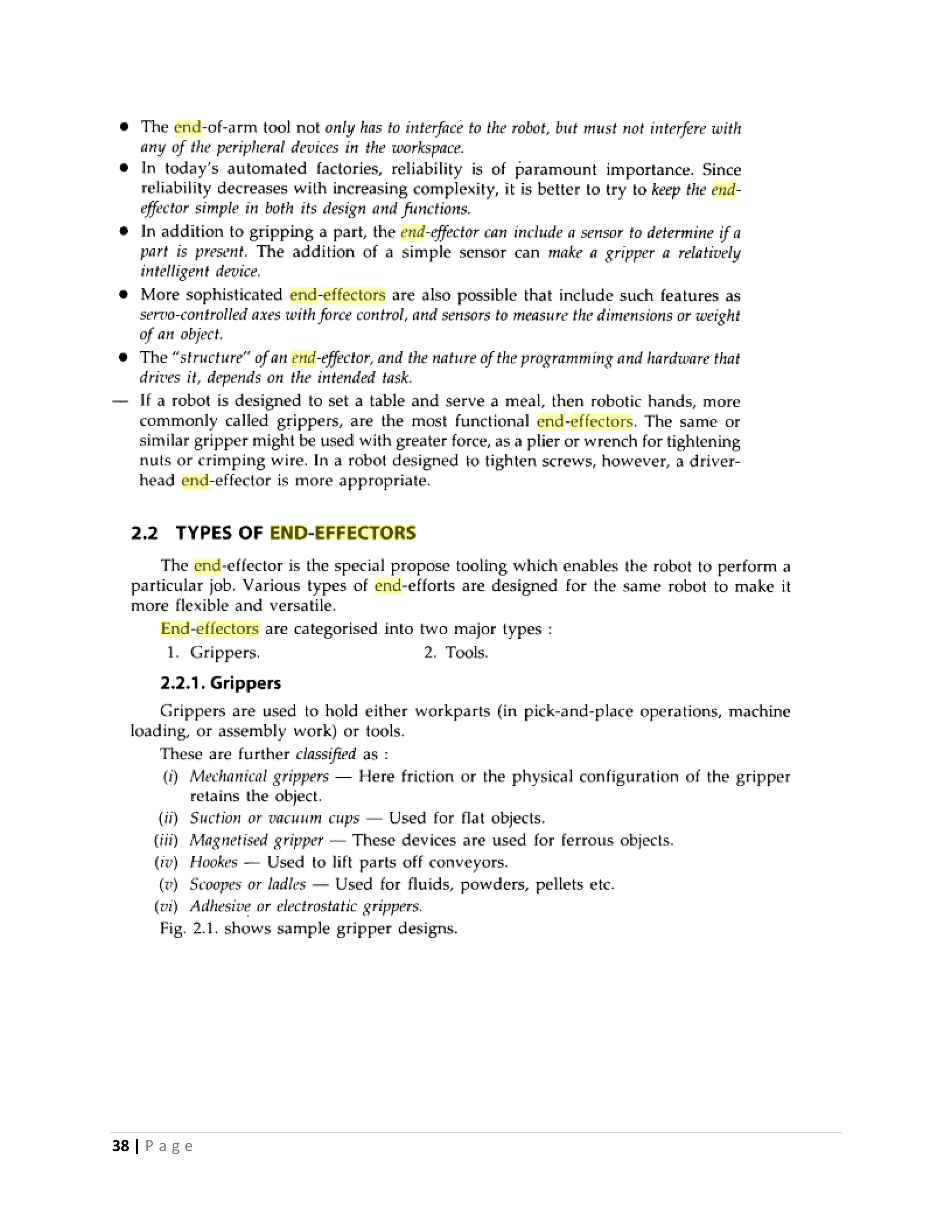
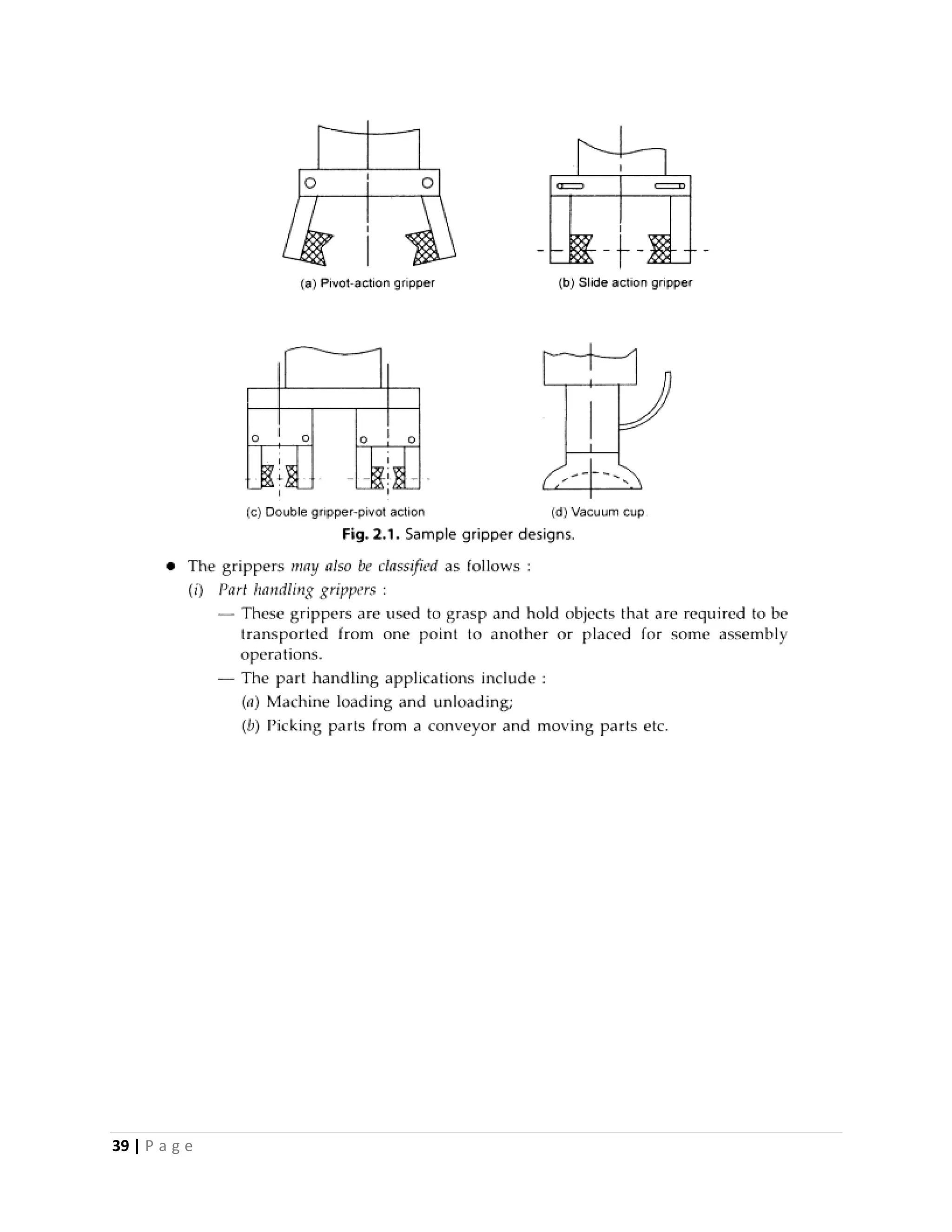
1.10.3 Types of end effectors 38
1.10.4 Grippers 38
1.10.5 Tools 39
1.10.6 Classification of End effectors 40
1.10.7 According to the types of grasping modality 40
1.10.8 According to number of grippers mounted on the wrist 42
1.10.9 According o mode of gripping 42
1.10.10 Mechanical Grippers 43
1.10.11 Mechanical Grippers with two fingers 44
1.10.12 Mechanical Grippers with three fingers 45
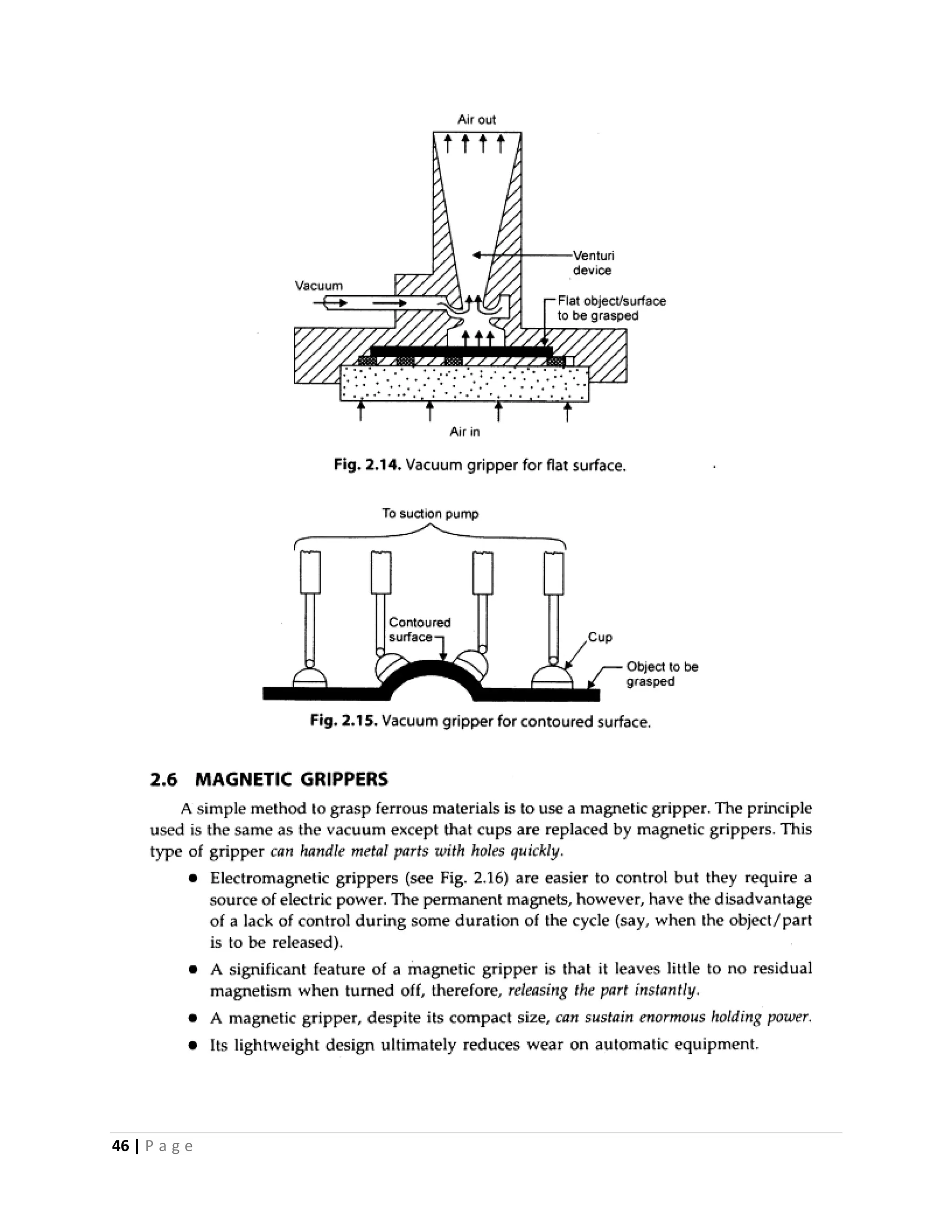
1.10.13 Vacuum Grippers 45
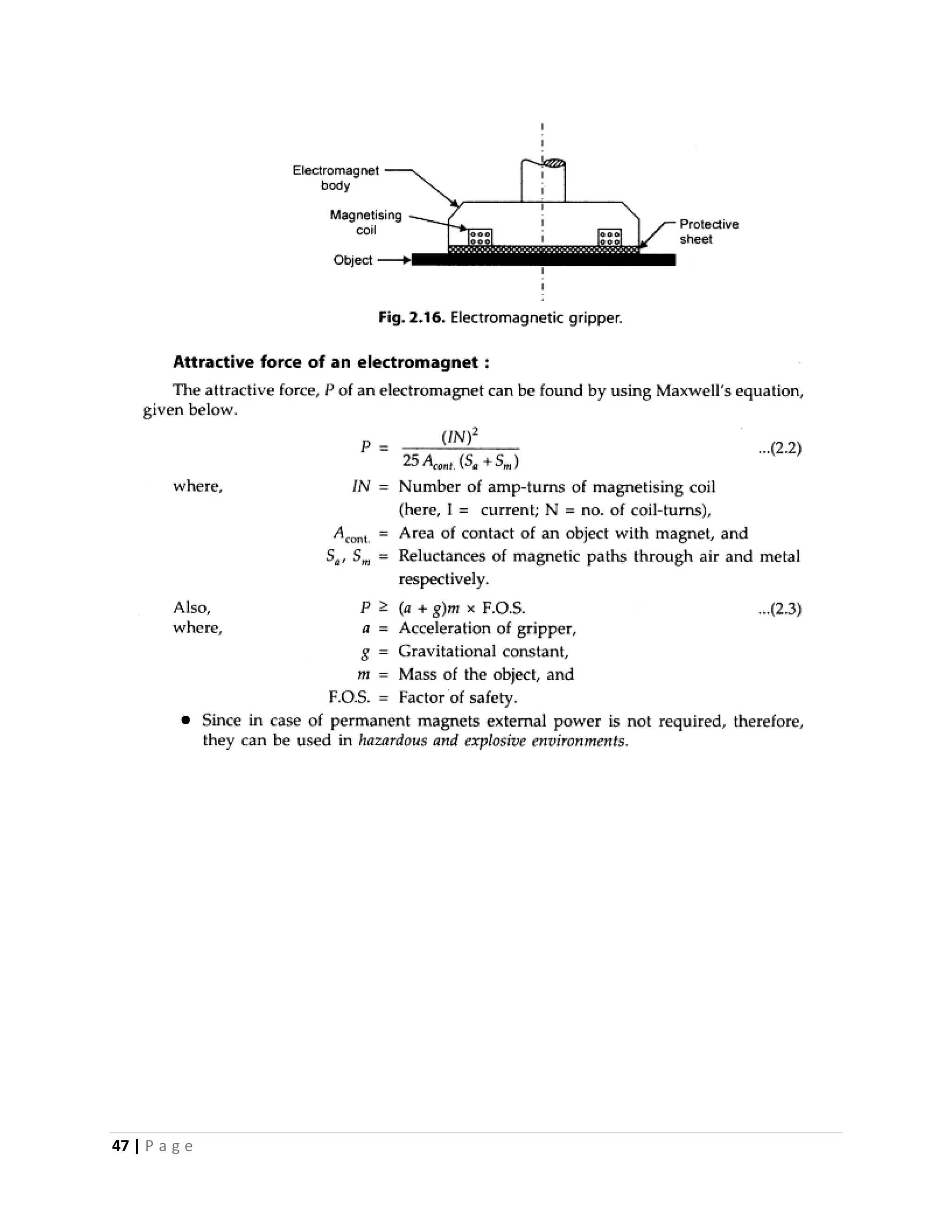
1.10.14 Magnetic Grippers 46
1.10.15 Adhesive Grippers 48
1.11 System Integration 48-49
References
5 | Pa g e
1.1.1 Robotics Definition
Robotics may be defined as follows:
Robotics: is a multidisciplinary field that focuses on the conception, design, construction,
operation, and utilization of robots.
Robotics: is interdisciplinary subject that integrates principles from mechanical
engineering, electrical engineering, computer science, and other disciplines to create
machines capable of performing tasks autonomously or semi-autonomously.
Robotics: Machine can complete the task without interference of human being
Robotics: is the science of designing and building robots suitable for real-life applications
in automates manufacturing and other non-manufacturing environments.
Robotics: is the art, knowledge base and know how of designing, applying and using robots
in the human endeavors.
Robotics: is an exciting, dynamic interdisciplinary field of study.
1.1.2 Advantages and Disadvantages of Robotics
Advantages Disadvantages
Reliability, Scalability and Flexibility,
Cost Savings, Improved Quality Control
1. Job Displacement and Employment
Concerns
Low cost in the Long run 2. Safety Risks and Workplace Hazards
Increased Efficiency and Productivity 3. High Initial Investment Costs
Improved Precision and Accuracy,
Safety and Hazardous Work
4. Technical Limitations and Maintenance
Challenges
Enhancement of Human Capabilities etc. 5. Ethical and Social Implications etc.
1.1.3 Applied Robotics Definition
Applied Robotics may be defined as follows:
Applied robotics: is the practical application of robotics principles, involving the design,
construction, and use of robots to perform tasks traditionally done by humans, often in industries
like manufacturing, healthcare, and exploration.
Applied robotics refers to the practical application of robotic systems to perform specific tasks
across various industries, enhancing efficiency, precision, and safety. These robots are often
designed and programmed for particular functions, making them integral to sectors such as
manufacturing, healthcare, agriculture, and logistics.
Applications of Applied Robotics:
6.
6 | Pa g e
Manufacturing: Robots are extensively used in assembly lines for tasks like welding,
painting, and material handling. Their precision and ability to operate continuously
contribute to increased productivity and consistent product quality.
en.wikipedia.org
Healthcare: Surgical robots assist surgeons in performing delicate procedures with
enhanced accuracy. Additionally, robots are utilized for rehabilitation therapy, providing
patients with personalized exercises and monitoring progress.
en.wikipedia.org
Agriculture: Agricultural robots, such as autonomous tractors and harvesters, aid in
planting, tending, and harvesting crops. They optimize resource use and reduce labor
costs, contributing to more sustainable farming practices.
en.wikipedia.org
Logistics: In warehouses and distribution centers, robots handle tasks like sorting,
packaging, and transporting goods. Their ability to navigate complex environments and
handle heavy items improves supply chain efficiency.
wsj.com
Recent Developments in Applied Robotics:
Humanoid Robots in Warehousing: Companies like Agility Robotics have introduced
humanoid robots, such as "Digit," capable of navigating environments designed for
humans. These robots perform tasks like retrieving and carrying bins to conveyor belts,
marking a significant advancement in automation.
wsj.com
AI-Driven Learning: Integrating artificial intelligence allows robots to learn from
human demonstrations and adapt to new tasks. For instance, Standard Bots is developing
robots that can "think" for themselves, learning tasks like dishwashing by observing
human actions, thereby expanding their practical applications.
nypost.com
1.1.4 LAWS OF ROBOTICS: Isaac Asimov's "Three Laws of Robotics"
Following are the three laws (philosophical in nature) of robotics was given by Isaac Asimov's;
zeroth Law was added later on-
7.
7 | Pa g e
1. Zeroth Law: A robot must not injure a human being or, through inaction, allow a human
being to come to harm.
2. First Law: A robot must must not harm a human being or, through inaction, allow one to
come to harm.
3. Second Law: A robot must obey orders given it by human beings except where such
orders would conflict with the First Law.
4. Third Law: A robot must protect its own existence as long as such protection does not
conflict with the First or Second Law or higher order law.
1.2.1 ROBOTICS-PHILOSOPHYICAL CONSIDERATIONS
During the last century, the modern science grew at fast pace in “stages” given below.
First stage Invention of tools.
Second stage Invention of steam and I.C. engine.
Third stage Technological development; a brand of numerically controlled (NC)
machines came into existence in the early 1950s
Fourth stage Invention of computers/microprocessors etc. development of computer
numerically controlled (CNC) machines.
Final stage Development of concept of Robotics.
Robotics, conceptually, differs from conventional automation in the following respects:
(i) Its ability to perform on its own, going to the extent of unmanning several operations.
(ii) To relieve man of tedious and mindless, repetitive and hazardous jobs
Important areas of robotics:
The important areas of robotics are:
1. Prosthesis:
-It deals with artificial replacements for parts of the human body.
2. Exoskeleton:
- It deals with frames which surround the human limbs or frames and devices
3. Telecherics:
-It concerned with remote manipulation.
4. Locomotive devices:
-This area deals with robot designed to walk on legs.
1.2.2 Generation of Robots
First Generation: Early Mechanical Innovations (Pre-20th Century)
Automata and Mechanical Devices: Long before modern robotics, inventors created
mechanical devices that mimicked human or animal actions. These early machines were
often powered by clockwork mechanisms and showcased the human fascination with
replicating life-like movements.
8.
8 | Pa g e
Second Generation: Emergence of Programmable Robots (1930s–1950s)
1930s–1940s: Innovators like Willard V. Pollard conceptualized early industrial robots
with human-like joint movements. In 1939, the humanoid robot Elektro was introduced at
the World's Fair, capable of walking, speaking, and performing simple tasks.
en.wikipedia.org
1950s: George Devol invented Unimate, the first digitally operated and programmable
robot, laying the foundation for modern industrial automation.
en.wikipedia.org
Third Generation: Industrial Automation and Advanced Robotics (1960s–1980s)
1960s–1970s: Robots like Unimate were integrated into manufacturing processes,
performing tasks such as welding and material handling, leading to increased efficiency
and precision in industrial operations.
1980s: Advancements included the development of direct-drive robotic arms and
humanoid robots like Wabot-2, capable of playing musical instruments and reading music
scores.
en.wikipedia.org
Fourth Generation: Intelligent and Autonomous Robotics (1990s–2000s)
1990s: The focus shifted towards creating robots with enhanced autonomy and
intelligence, incorporating artificial intelligence to perform complex tasks without direct
human intervention.
2000s: Humanoid robots began to emerge, designed to interact more naturally with
humans and navigate environments built for human use.
Fifth Generation: Integration of AI and Human-Robot Interaction (2010s–
Present)
2010s–2020s: Robots have become more integrated into daily life, with advancements in
AI enabling learning from human interactions. Companies like Agility Robotics
introduced humanoid robots such as Digit, capable of navigating complex terrains and
performing tasks alongside humans.
wsj.com
The development of general-purpose robots, capable of adapting to various tasks through
learning and imitation, has been a significant focus. These robots learn tasks through
imitation and reinforcement learning rather than explicit programming, drawing parallels
between their learning processes and human development.
9.
9 | Pa g e
1.2.3 A short history of industrial Robots
The first industrial robot, the Unimate, was developed in the 1950s by George Devol and
Joseph Engelberger, and it was first used in a General Motors plant in 1961, revolutionizing
manufacturing through automation.
Here's a more detailed look at the history of industrial robots:
Early Concepts & Inventors:
The concept of automated machines, precursors to robots, can be traced back to the
Renaissance era with artists and inventors like Leonardo Da Vinci.
George Devol, often called the "father of robotics," patented the first industrial robot, the
Unimate, in 1954.
Devol collaborated with Joseph Engelberger, who would become known as "the father of
robotics," to form Unimation Inc. in 1961, marking the birth of the industrial robotics
industry.
Unimate & Early Applications:
The Unimate, a 2,700-pound robotic arm, was designed to perform tasks like lifting and
stacking hot metal parts in a General Motors plant in 1962.
This early implementation demonstrated the potential of robots for handling dangerous or
repetitive tasks, paving the way for widespread adoption in manufacturing.
Key Milestones:
1930s: The earliest designs of industrial robots, like the "Position Controlling Apparatus"
by Willard V. Pollard, began to emerge.
1960s: The computer era ushered in a quantum leap for robotics, with advancements in
programming and control systems.
1969: Victor Scheinman at Stanford University invented the Stanford arm, an all-electric,
6-axis articulated robot, which opened up possibilities for assembly and welding
applications.
1970s: Industrial robotics took off in Europe, with companies like ABB and KUKA
entering the market.
1970s-1980s: The number of industrial robots in use in America grew from about 200 in
1970 to nearly 4,000 in 1980.
Evolution & Continued Development:
Industrial robots have evolved from simple, point-to-point manipulators to highly
sophisticated machines capable of performing complex tasks.
The development of sensors, cameras, and advanced control systems has enabled robots
to adapt to dynamic environments and perform tasks with greater precision and speed.
Today, industrial robots are integral to various industries, including automotive,
electronics, food processing, and pharmaceuticals.
10.
10 | Pa g e
Future Trends:
The rise of collaborative robots (cobots) allows humans and robots to work together in
the same space, enhancing efficiency and safety.
Machine learning and artificial intelligence are enabling robots to learn and adapt to new
tasks and environments.
The Industrial Internet of Things (IIoT) is connecting robots to other systems and
processes, enabling real-time data collection and analysis.
1.3.1 Applications of robots in: Welding
Early Welding Techniques (Pre-1950s)
Manual Welding: Before automation, welding was a labor-intensive and skill-based
manual process. Skilled welders would perform all aspects of the welding, from
preparing materials to joining them with heat or pressure.
Arc Welding (1920s-1930s): As industrialization grew, arc welding became a standard
method for joining metals. However, it still relied on manual labor and was time-
consuming.
2. The Advent of Industrial Robots (1950s-1960s)
General Motors and Unimation (1956): The first significant leap toward robotic
welding was made by General Motors and Unimation in the late 1950s. GM wanted to
automate its production line, and Unimation developed the first industrial robot,
"Unimate," which was later used in material handling and spot welding applications.
Introduction of Automation: The first robots were used in basic material handling and
simple tasks, including welding, but they were not yet widely adopted due to their high
cost and limited functionality.
3. Early Robot Welding (1970s)
Pioneering Applications: In the 1970s, robotic systems began to be used for welding
tasks, particularly for tasks like spot welding in the automotive industry. This was a
significant breakthrough because robots could perform repetitive and precise welding
operations with greater consistency than human workers.
Advanced Welding Technology: Robotic welding systems incorporated advanced
control systems, and robots began to take on increasingly sophisticated welding tasks.
These robots were often programmed to perform MIG (Metal Inert Gas) and TIG
(Tungsten Inert Gas) welding.
4. Robotic Welding for Mass Production (1980s)
Robots in Automotive Manufacturing: During the 1980s, major automotive
manufacturers, including Toyota, Ford, and BMW, started using robots for welding on
assembly lines. Robots performed spot welding, MIG welding, and arc welding to join
11.
11 | Pa g e
parts of car bodies. This allowed manufacturers to achieve greater speed and precision in
production.
Programmability: Robots became more programmable and could handle more complex
and intricate welding tasks, allowing for more flexibility in manufacturing and reducing
the reliance on skilled labor.
Adoption of Laser Welding: Laser welding technology began to develop during this
period, and robots equipped with laser welding systems allowed for even more precise,
high-speed, and high-quality welds.
5. Improved Technology and Integration (1990s-2000s)
Increased Use in Various Industries: By the 1990s, robotic welding systems were used
not only in automotive manufacturing but also in industries such as aerospace,
electronics, heavy machinery, and shipbuilding.
Advances in Sensors and Vision Systems: The integration of advanced sensors,
cameras, and vision systems improved the robots' ability to adapt to different welding
tasks. These systems helped robots detect the position of workpieces and adjust welding
parameters in real time.
Collaborative Robots (Cobots): In the late 2000s, collaborative robots (cobots) began to
be introduced in the welding industry. These robots could work alongside human
operators, handling the more dangerous, repetitive aspects of welding while allowing
workers to focus on more complex tasks.
6. Modern Robotic Welding (2010s-Present)
Increased Precision and Flexibility: Today's robotic welding systems are faster, more
precise, and adaptable. Advances in artificial intelligence (AI), machine learning, and
data analytics have allowed for smarter robots that can learn from experience and adjust
their operations.
Integration with Industry 4.0: Robotic welding has become a key part of the Industry
4.0 revolution. Smart manufacturing systems, including cloud computing and the Internet
of Things (IoT), have enabled robots to communicate with other machines and systems to
optimize production schedules, detect defects, and perform predictive maintenance.
Lightweight and Cost-Effective Robots: Modern robotic systems have become more
affordable and accessible to smaller manufacturers, not just the large corporations. These
robots are often more compact and flexible, making them suitable for various types of
welding tasks.
Robotic Arc Welding (RAW) and Collaborative Welding: Robotic arc welding
continues to be refined, with robots taking on more advanced processes like multi-pass
welding, hybrid welding (such as laser-MIG combinations), and more.
1.3.2 Types of Robots used in welding Industry
In the welding industry, several types of robots are used to perform different welding tasks.
These robots are designed for various applications, depending on the type of welding process, the
12.
12 | Pa g e
complexity of the task, and the environment in which they are deployed. Below are the main
types of robots used in the welding industry:
1. Articulated Robots (Robotic Arms)
Description: These are the most commonly used robots in welding applications.
Articulated robots have a series of joints, typically resembling a human arm, that allows
them to perform complex, multi-axis movements. They are capable of performing
welding tasks in multiple orientations and angles.
Applications:
o Arc Welding: Used for processes like MIG, TIG, and Stick welding.
o Spot Welding: Especially in the automotive industry for joining sheet metal.
Advantages: High flexibility, precision, and ability to access hard-to-reach areas. They
can be used for both high-volume and complex, custom welding tasks.
2. SCARA Robots (Selective Compliance Assembly Robot Arm)
Description: SCARA robots are designed for tasks that require precision, particularly in
applications that involve picking, placing, and assembling. They have a vertical arm with
rotational movements but are limited in terms of vertical flexibility.
Applications:
o Arc Welding: In some applications where the robot does not need extensive
vertical movement.
o Spot Welding: In certain applications, SCARA robots can be used for spot
welding of small parts.
Advantages: High precision and speed for tasks that require repetitive motion. They are
more compact and can be used in constrained spaces.
3. Cartesian Robots (Linear Robots)
Description: Cartesian robots move along three linear axes (X, Y, Z), which makes them
suitable for welding applications that involve linear motion and straightforward path
following.
Applications:
o Welding Large Parts: Used for large workpieces like ship parts, large frames, or
heavy machinery.
o Welding on a Fixed Track: Ideal for processes such as laser welding or large-
scale MIG welding on flat surfaces.
Advantages: High precision in linear movements and ease of setup. They are often used
for simpler, repetitive welding tasks in fixed positions.
4. Delta Robots (Parallel Robots)
Description: Delta robots are a type of parallel robot with arms connected in a triangular
configuration. They are extremely fast and precise, often used in picking, placing, and
light assembly tasks.
13.
13 | Pa g e
Applications:
o Precision Welding Tasks: Can be used for applications that require high speed
and precision, such as small part welding or micro-welding.
o Laser Welding: Often used for small-scale welding applications where accuracy
is paramount.
Advantages: High speed and precision, especially for tasks involving small parts or
when rapid part handling is needed.
5. Collaborative Robots (Cobots)
Description: Cobots are designed to work alongside human operators safely. They are
typically lighter, smaller, and equipped with sensors that allow them to detect human
presence and stop automatically if a collision occurs. While cobots aren't as fast or strong
as traditional industrial robots, they excel in flexibility and ease of use.
Applications:
o Light Welding Tasks: Used for welding smaller or simpler parts that do not
require heavy-duty robots.
o Assistive Welding: Can assist human operators by handling the repetitive or
dangerous tasks in a welding operation.
Advantages: They are easy to program, flexible, and can work directly with humans,
making them ideal for smaller shops or businesses with limited space and workforce.
6. Mobile Robots
Description: Mobile robots are equipped with wheels or tracks, allowing them to move
around the workspace autonomously. These robots are often used for welding tasks
where mobility and flexibility are required.
Applications:
o Automated Welding on Large or Complex Parts: Used in large-scale
manufacturing like shipbuilding, aerospace, or automotive industries, where the
workpieces are large and may need to be welded at different locations on the
floor.
o Robotic Laser Welding: Can transport the laser welding head to different
locations.
Advantages: Flexibility and mobility, ideal for large, dynamic environments where the
workpiece changes location or orientation.
7. Welding-Specific Robots (Customized Robotic Solutions)
Description: These robots are specifically designed and customized for certain welding
processes or unique manufacturing environments. They may include robots tailored for
specific applications such as laser welding, ultrasonic welding, or hybrid welding.
Applications:
o Laser Welding Robots: High-precision robots designed specifically for laser
welding.
14.
14 | Pa g e
o Hybrid Welding Robots: Robots designed to perform multiple welding
processes, like combining MIG and laser welding for improved productivity.
Advantages: Highly specialized for specific tasks, ensuring the highest levels of
efficiency and quality for complex welding processes.
8. Multi-Arm Robots
Description: These robots feature multiple arms to handle different tools or tasks
simultaneously. They offer enhanced flexibility and can be programmed to work in
unison.
Applications:
o Complex Welding Operations: Can be used for multi-tasking, such as
performing welding while also handling or positioning parts.
o Automated Production Lines: Particularly useful in manufacturing
environments with high throughput and the need for coordinated tasks.
Advantages: Increased productivity and reduced cycle times due to simultaneous task
execution.
1.3.3 Year wise development of robot in welding industry
The development of robots in the welding industry has been a gradual and transformative
process, driven by advancements in automation, robotics technology, and welding techniques.
Below is a year-wise timeline highlighting key milestones in the evolution of robotic welding:
1. 1950s – Early Beginnings of Industrial Robotics
1956: The Unimate, the first industrial robot, was created by George Devol and Joseph
Engelberger. Although it was initially used for material handling, the Unimate would later be
adapted for use in spot welding.
1959: General Motors installed the first industrial robot for material handling and spot welding at
its plant in New Jersey. This marked the initial step toward using robots for welding tasks.
2. 1960s – The First Use of Robots in Welding
1961: Unimation robots were introduced in the automotive industry. They were used to automate
spot welding on car production lines, particularly for tasks like joining parts of vehicle bodies.
This was the first major step in welding automation.
1969: The first use of robotic arms for arc welding began to gain traction, allowing the robots
to perform more sophisticated tasks beyond just spot welding. Robots were being integrated into
more specialized welding applications.
3. 1970s – Advancements in Welding Robot Technology
1970s: Robots equipped with arc welding capabilities began to be used more widely, especially in
the automotive industry for processes like MIG (Metal Inert Gas) and TIG (Tungsten Inert Gas)
welding.
15.
15 | Pa g e
1973: The first commercial use of robotic welding systems was implemented in manufacturing,
particularly in the automotive sector. These systems were used for welding the large body parts of
cars in an automated production line.
1977: KUKA Robotics developed its first industrial robot, which was later adapted for welding.
This marked the beginning of more widespread adoption of robots in welding and other industrial
applications.
4. 1980s – Mass Adoption and Technological Expansion
1980s: Robotic welding systems became more widespread in the automotive industry, where
spot welding robots were used to assemble car bodies. The use of robots expanded beyond simple
spot welding to more complex processes such as arc welding.
1983: The introduction of more advanced welding robots, particularly with the integration of
programmable logic controllers (PLCs), allowed robots to handle more intricate tasks and
perform more precise welding operations.
1985: Mitsubishi introduced one of the first robotic systems capable of multi-axis control,
which significantly improved the precision and range of welding applications. The growth in the
industry also led to the development of more advanced welding technologies like laser welding.
5. 1990s – Integration with Computer Technology and Industry Standards
1990s: The introduction of vision systems and feedback control mechanisms allowed robots to
adjust welding parameters in real-time, improving the quality and accuracy of welds. Robotic
welding systems became more adaptable and could handle complex tasks.
1995: The first generation of collaborative robots (cobots) began to emerge, making it possible
for robots and humans to work together in welding tasks. While cobots were initially limited in
capabilities, they paved the way for more integrated workflows between humans and robots in
manufacturing settings.
1997: FANUC introduced robots with advanced arc welding capabilities, making robotic welding
systems more adaptable and precise, allowing for greater flexibility in manufacturing processes.
6. 2000s – Increased Adoption in Various Industries
Early 2000s: Robotic welding systems were widely adopted across various industries, not just
automotive. Aerospace, electronics, and heavy machinery manufacturers began to incorporate
robotic welding into their production lines.
2002: The development of laser welding robots brought a new level of precision and speed to the
industry. Laser welding became especially popular in industries requiring fine, high-quality
welds, such as aerospace and electronics.
2005: Hybrid welding systems that combined different welding processes, such as laser and arc
welding, started to gain traction. These robots offered the ability to combine the advantages of
multiple welding methods in a single operation.
7. 2010s – Smart Robotics and Industry 4.0
2010s: The introduction of Industry 4.0 concepts transformed robotic welding with the
integration of Internet of Things (IoT), machine learning, and artificial intelligence (AI).
Robots became more adaptive, could self-diagnose issues, and optimize welding parameters in
real time.
16.
16 | Pa g e
2013: The use of collaborative robots (cobots) significantly expanded in welding applications.
These robots were designed to work safely alongside human workers, handling the dangerous or
repetitive tasks while allowing humans to focus on more complex operations.
2015: FANUC and other major robotic companies introduced advanced arc welding robots that
featured built-in vision systems, allowing robots to detect part orientation and automatically
adjust welding paths and parameters.
2017: Artificial intelligence (AI) and machine learning started being integrated into robotic
welding systems to enhance their adaptability and ability to learn from previous welding jobs,
improving both efficiency and quality.
8. 2020s – Enhanced Automation and AI Integration
2020: Robotic welding systems equipped with vision sensors and AI-powered algorithms
became common, allowing for faster and more accurate welding operations. These systems could
autonomously adjust welding parameters, ensuring optimal performance for varying part sizes
and types.
2021-2022: The trend of cobot welding continued to grow. These robots were increasingly used
in smaller factories, offering high flexibility, ease of programming, and collaboration with human
workers. They were ideal for small batch production and tasks requiring high precision but
minimal setup time.
2023-Present: The integration of 5G and cloud computing technologies with robotic welding
systems enables real-time monitoring, predictive maintenance, and remote operation. Companies
are moving toward fully automated, smart factories where robots perform not only welding but
also quality control, maintenance, and logistics.
1.3.4 Summary of Key Milestones in Robotic Welding Development:
1950s-1960s: The first industrial robots (Unimate) used for material handling and simple spot
welding in automotive industries.
1970s: Robotic arms adapted for arc welding and multi-axis control for more complex welding
tasks.
1980s: Widespread adoption in the automotive industry, integration of programmable logic
controllers, and development of multi-axis robots for precision welding.
1990s: Introduction of vision systems and feedback control, robotic welding expanded to multiple
industries, and the first cobots began to emerge.
2000s: Adoption of hybrid welding and laser welding robots for precision applications across
various industries.
2010s: Integration of AI, machine learning, IoT, and Industry 4.0 concepts into robotic welding
systems, including advanced cobot use.
2020s: Continued innovation in AI, cloud computing, and 5G technology for real-time
monitoring and optimization, leading to smarter, more autonomous robotic welding systems.
1.4.1 Summary of Key Milestones in Robotic Car Body Assembly and Painting:
1961: First industrial robot used in car body assembly (spot welding) at General Motors.
1970s: Robots used for arc welding and spot welding in automotive body assembly,
including the introduction of the first fully automated robotic assembly line by GM.
1980s: Increased adoption of robotic arms for welding, material handling, and painting,
with significant advancements in programmable robots.
17.
17 | Pa g e
1990s: Integration of vision systems and sensors into robotic arms, improving flexibility
and precision in car body assembly tasks like welding and inspection.
2000s: Hybrid welding systems and laser welding robots became common; robots
became a standard tool in car body assembly in global automotive factories.
2010s: Introduction of Industry 4.0 concepts, AI integration, and collaborative robots
(cobots) alongside human workers in car body assembly.
2020s: Increased use of AI, machine learning, and 5G technology to optimize and
automate car body assembly lines, with more advanced robots and autonomous systems.
The integration of robots in car body assembly has significantly improved the automotive
production process by enhancing efficiency, precision, safety, and flexibility. The trend toward
smarter, more autonomous systems continues to evolve with emerging technologies such as AI,
IoT, and advanced robotics.
1.5.1 Popular Robots Used in Painting Applications
Robots are increasingly being used in the painting industry to automate tasks, improving
efficiency, consistency, and quality while reducing human exposure to harmful chemicals and
repetitive motion. They are particularly useful for tasks that require precision and repetitive
actions, such as spraying, coating, and applying finishes. Here are the primary applications of
robots in the painting industry:
Automotive Painting
Underbody Painting
Industrial Coating and Surface Treatment
Spray Painting (Liquid Coatings)
Aerospace and Aircraft Coating
Surface Treatment of Aircraft Components
Industrial and Commercial Painting
Specialized Painting Tasks
Here are some commonly used robots in the painting industry, known for their precision and
adaptability:
1. ABB IRB 6700 Series
o Description: These robots are used in automotive manufacturing and industrial
painting applications due to their precision and flexibility.
o Features: High payload capacity, advanced control systems, and a large work
envelope make them ideal for painting large objects or multiple items.
2. KUKA KR AGILUS
o Description: A high-precision robot used for delicate painting and coating tasks,
especially in the automotive and aerospace industries.
o Features: Compact design, fast movement, and high accuracy for applications
that require a fine touch.
3. FANUC P-250iA
18.
18 | Pa g e
o Description: A painting robot used in automotive industries, especially for
applications requiring high-speed, consistent painting.
o Features: Equipped with advanced spray technologies to reduce overspray and
ensure uniform paint coverage.
4. Yaskawa Motoman MH5
o Description: A versatile robot used for painting, coating, and other finishing
tasks. It’s particularly useful in applications requiring a precise paint finish.
o Features: High speed, flexibility, and easy integration into automated production
lines.
5. Universal Robots UR Series (Collaborative Robots)
o Description: These are collaborative robots (cobots) that can be used for smaller-
scale painting tasks in environments where direct human-robot interaction is
possible.
o Features: Easy programming, flexibility, and safety in shared workspaces make
these robots ideal for painting small or medium-sized objects.
6. Staubli RX160
o Description: A robot commonly used for painting applications in automotive and
aerospace industries.
o Features: Excellent for high-precision painting tasks with high payload capacity
and flexibility.
The use of robots in painting applications provides significant advantages, including improved
consistency, speed, and safety. Robotic systems have revolutionized the painting industry by
allowing for precise control of coating processes in a wide range of applications, from
automotive and aerospace to infrastructure and commercial painting. The robots used in painting
are equipped with advanced spray technologies, sensors, and controls to ensure that paint is
applied evenly and efficiently, reducing waste and improving overall quality. As technology
continues to evolve, robots will continue to play a central role in automating and enhancing the
painting process across industries.
1.6 Application of Robots in Machining
1. FANUC Robotics
Robots Used:
o FANUC M-20iA / M-10iA: These robots are commonly used in applications like
milling, grinding, and material handling. They are known for their high precision,
flexibility, and high payload capabilities.
o FANUC LR Mate 200iD: A small, versatile robot used in light machining tasks such as
handling smaller parts, deburring, and polishing.
Application Examples:
o Used in the automotive industry for loading and unloading CNC machines.
o Precision milling and deburring in the aerospace industry.
2. KUKA Robotics
Robots Used:
19.
19 | Pa g e
o KUKA KR 16: A six-axis robot ideal for light machining tasks like material handling
and grinding. Its precision and flexibility make it ideal for various applications in
automotive and aerospace machining.
o KUKA KR 30-3: A robot designed for heavy-duty machining tasks, including CNC
machine loading and unloading, milling, and tool changing.
Application Examples:
o Used in the aerospace industry for milling and grinding of complex parts.
o Material handling and automated assembly in automotive production lines.
3. ABB Robotics
Robots Used:
o ABB IRB 6700: A versatile robot used in applications like material handling, turning,
and milling. It is known for its high accuracy and can handle complex machining tasks.
o ABB IRB 6700 300: This robot can be used in heavy-duty machining applications like
grinding, deburring, and polishing large metal parts.
Application Examples:
o Milling and deburring of metal components for the automotive and aerospace industries.
o Automated part loading and unloading for CNC machines in manufacturing plants.
4. Universal Robots (Cobots)
Robots Used:
o UR10e: A collaborative robot that is often used in light machining applications such as
part loading and unloading, tool handling, and simple inspection tasks. Its lightweight
design and ease of programming make it ideal for small-batch or high-mix machining
operations.
Application Examples:
o Used for material handling in CNC machines and as a tool for basic inspection and
quality control.
o Polishing, deburring, and finishing small machined parts in various industries.
5. Yaskawa Motoman
Robots Used:
o Motoman MH50: A robot designed for machining applications, including material
handling, milling, and part inspection. Its compact design allows it to work in tight spaces
and automate operations on machining centers.
o Motoman GP25: A versatile robot used for high-payload machining tasks such as
loading/unloading CNC machines, milling, and turning operations.
Application Examples:
o CNC machine tending, material handling, and tool change automation in the
manufacturing of precision components.
o Polishing and deburring of metal parts in automotive and consumer electronics
manufacturing.
Robots are revolutionizing machining applications across multiple industries by improving
precision, flexibility, and productivity. Whether performing tasks such as milling, drilling,
grinding, turning, or material handling, robots provide numerous benefits like reduced labor
20.
20 | Pa g e
costs, enhanced safety, and improved product quality. Manufacturers continue to invest in
robotic solutions like FANUC, KUKA, ABB, Universal Robots, and Yaskawa Motoman to take
advantage of the growing potential of robotics in the machining industry.
1.7 Material transfer-Kinematics and Mechanism review
1.7.1 Applications of Robots in Material Transfer: Kinematics and Mechanism Review
In industrial automation, material transfer refers to the movement, handling, and positioning of
materials between various points in a production system. Robots are increasingly used for
material transfer in industries such as automotive, aerospace, manufacturing, logistics, and
packaging. They help improve speed, precision, safety, and efficiency while reducing labor
costs.
Applications of Robots in Material Transfer
1. Loading and Unloading
o Description: Robots are used to load and unload materials into machines,
conveyors, or assembly stations. This is common in manufacturing, especially in
applications such as CNC machining, injection molding, or automated assembly
lines.
o Examples:
CNC machine tending (loading/unloading parts).
Injection molding machines (loading/unloading raw material).
Palletizing or depalletizing of items.
2. Material Handling
o Description: Robots are deployed for general material handling tasks, including
the transportation of parts, raw materials, or products within a production line or
warehouse. They can move materials between machines, stacking, sorting, or
moving items for further processing.
o Examples:
Transporting car parts between production stages.
Moving packages in a warehouse or distribution center.
Delivering raw materials to assembly lines.
3. Pick and Place Operations
o Description: Robots are used in pick and place operations, where they pick up
parts from one location and place them in another with high accuracy and
repeatability.
o Examples:
Picking up parts from a conveyor and placing them on assembly lines.
Sorting small components for packaging or further processing.
Packaging and palletizing in the food and beverage industry.
4. Packaging and Sorting
21.
21 | Pa g e
o Description: Robots in material transfer are often used for packaging operations
where they take finished goods and place them in packaging containers for
shipment or storage. Sorting operations involve classifying materials based on
size, shape, or other properties.
o Examples:
Sorting items into different bins or containers based on shape, weight, or
type.
Packaging products in specific sizes and configurations for shipping.
Robotic arms used for case packing in the food and beverage industry.
5. Assembly Line Material Transfer
o Description: Robots are used in assembly lines to transfer materials between
different stages of production. They can transport items, deliver components for
assembly, and even automate the movement of completed products.
o Examples:
Transporting vehicle parts in the automotive assembly line.
Delivering components to a robotic workstation for automated assembly
tasks.
6. Automated Guided Vehicles (AGVs)
o Description: AGVs are mobile robots used to transport materials across larger
distances within factories or warehouses. These robots are often guided by tracks,
magnetic strips, or vision-based systems.
o Examples:
Moving materials in large-scale factories or warehouses.
Delivering components between assembly stations or storage areas.
7. Warehouse and Distribution Center Operations
o Description: Robots are used for material transfer in warehouses and distribution
centers, where they can move goods from storage to picking stations or transport
packages to dispatch areas.
o Examples:
Moving packages to packing stations for sorting and shipment.
Transporting goods within large-scale distribution centers.
1.7.2 Kinematics and Mechanisms in Robotic Material Transfer
Robotic material transfer involves complex kinematics and mechanisms that allow robots to
move materials with accuracy, efficiency, and adaptability. Understanding these components is
essential to optimizing the material transfer process.
1. Kinematics of Robots in Material Transfer
Kinematics refers to the study of motion without considering the forces involved. In the context
of robotic material transfer, kinematics focuses on how a robot moves (its position, velocity, and
acceleration) and the relationship between its joints and end-effector (e.g., grippers, claws, or
suction cups).
Forward Kinematics (FK):
22.
22 | Pa g e
o Forward kinematics determines the position of the robot's end-effector based on
the known angles of the joints. This is crucial in material transfer when
determining the exact location where a robot can pick up or place materials.
o Application: In a robotic pick-and-place operation, FK ensures that the robot arm
can accurately reach the position of the object on a conveyor belt or move a
component into the right location for assembly.
Inverse Kinematics (IK):
o Inverse kinematics calculates the required joint angles to achieve a desired
position of the robot's end-effector. It is essential for planning the robot's
movements when it needs to move materials between specified locations.
o Application: In material transfer, IK is used to compute the joint movements
necessary to move materials from one station to another, ensuring smooth
handling and placement.
Trajectory Planning:
o This involves planning the path the robot’s end-effector should follow to ensure
that it can pick up or place the material without collision or error. This is
important for smooth material handling.
o Application: Trajectory planning is used to move materials between machines
while avoiding obstacles or coordinating with other robotic arms or AGVs in the
system.
2. Mechanisms in Robotic Material Transfer
Robotic mechanisms are physical devices or systems that enable robots to perform tasks such as
picking, holding, and transferring materials. These mechanisms may involve arms, grippers,
conveyors, or mobile robots, and they must be designed for speed, flexibility, and precision.
Articulated Robotic Arms:
o Articulated robots typically have a series of linked joints, allowing for a wide
range of motion and flexibility. These robots are often used for picking and
placing tasks.
o Mechanism: These arms typically use servo motors and gears to control
movement, which can be optimized for precision and speed when transferring
materials.
o Example Application: In manufacturing, an articulated robot arm can pick up car
parts from a conveyor belt and place them into a machine for further processing.
Cartesian Robots (Linear Robots):
o These robots have linear movements along three orthogonal axes (X, Y, and Z).
They are often used for applications that require straight-line movement and
precise handling of materials.
o Mechanism: Cartesian robots use linear actuators, usually driven by stepper
motors or servo motors, to move materials with precision along fixed paths.
o Example Application: They are ideal for pick-and-place tasks and material
handling in confined spaces, such as stacking products or sorting materials.
Delta Robots:
23.
23 | Pa g e
o Delta robots are used for high-speed pick-and-place tasks. They feature parallel
arms and are capable of moving materials quickly and accurately.
o Mechanism: Delta robots use lightweight arms controlled by parallel kinematics
and high-speed actuators for rapid material transfer in packaging and sorting
operations.
o Example Application: Delta robots are used in food packaging industries for
fast, accurate placement of items.
Mobile Robots (AGVs):
o Automated Guided Vehicles (AGVs) are mobile robots used for transporting
materials over large distances within a factory or warehouse. These robots can be
guided using various navigation systems, such as GPS, laser-based, or vision-
based systems.
o Mechanism: AGVs use wheels or tracks for movement and are equipped with
sensors and controllers to follow predefined paths or navigate autonomously.
o Example Application: AGVs are employed to transport materials between
assembly stations or deliver components to assembly lines in large manufacturing
plants.
Conveyor Systems:
o Conveyors are integrated with robotic systems to transport materials in automated
material transfer operations. These systems move parts from one station to
another while robots interact with the materials for tasks like sorting, inspection,
and packaging.
o Mechanism: Conveyors often use belts or rollers to move parts, while robots use
vision systems or sensors to interact with parts as they pass along the conveyor.
o Example Application: Robotic systems can handle parts on a conveyor in
assembly lines, automatically picking parts for assembly or inspection.
3. Gripping Mechanisms for Material Transfer
Gripping mechanisms are essential in material transfer robots, allowing them to securely grasp
and manipulate objects. Some common types include:
Mechanical Grippers:
o These are typically two-fingered or three-fingered grippers that physically clamp
down on the material. They are used for handling solid, rigid parts.
Suction Cups:
o Suction cups are used for gripping non-porous materials, such as glass, plastic, or
metal sheets. These are especially useful in high-speed pick-and-place operations.
Magnetic Grippers:
o Magnetic grippers use magnets to handle ferrous materials. These are commonly
used in industries where metallic materials need to be moved efficiently and
quickly.
Robots play a crucial role in material transfer operations, enabling efficient and precise
movement of materials in various industries. From loading and unloading to pick-and-place
tasks, robots provide significant advantages in automation. The key to successful robotic material
24.
24 | Pa g e
transfer lies in understanding and optimizing kinematics (forward and inverse kinematics,
trajectory planning) and robotic mechanisms (articulated arms, delta robots, AGVs, conveyors,
and gripping systems). The combination of precise motion control and specialized mechanisms
enables robots to handle a wide range of material transfer tasks, improving productivity and
reducing operational costs.
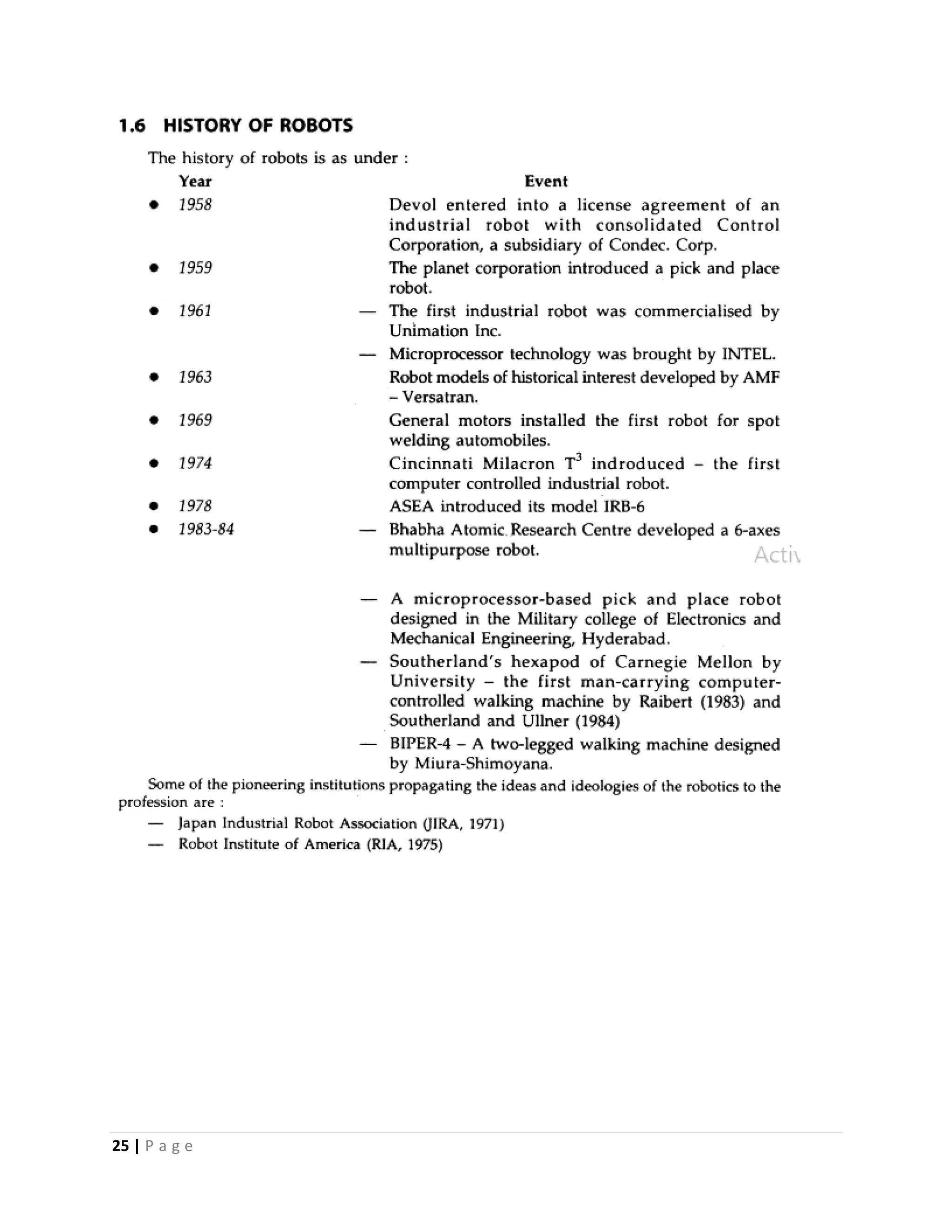
1.7.3 History of Robots
The history of robots us as under:
Year Event
1985 Devol entered into a license agreement of an
industrial robot with consolidated control
corporation, a subsidiary of condec. Corp.
1959 The planet corporation introduced a pick and
place robot.
1961 The first industrial robot was commercialized
by Unimate Inc.
Microprocessor technology was brought by
INTEL.
1963 Robot models of historical interest
development by AMF, Versatran
1963 General Motor installed the first robot for spot
welding automobiles
1974
1978
1983-84
28 | Pa g e
1.8 Task Descriptions
1.8.1 Task Descriptions in robotics
In robotics, tasks are specific activities that robots are programmed or designed to perform.
These tasks can range from simple movements to complex interactions with the environment,
and they often vary across industries depending on the application. Here are several task
descriptions in robotics, categorized by their type and application area:
1. Material Handling Tasks
Material handling tasks involve robots moving, transferring, sorting, or stacking materials within
a manufacturing or logistics environment.
a. Pick and Place
Description: A robot picks an object from one location and places it at a specified target
position.
Application: Common in packaging, assembly lines, and sorting applications where robots pick
items from conveyors and place them into bins, trays, or packaging boxes.
Example: A robot picks up a part from a conveyor belt and places it on an assembly line.
29.
29 | Pa g e
b. Loading and Unloading
Description: Robots load raw materials into machines and unload finished products after
processing.
Application: In manufacturing, robots load parts into CNC machines or injection molding
machines and unload finished items after processing.
Example: A robot loads components into a milling machine and then unloads them once they
are machined.
c. Sorting
Description: Sorting tasks involve robots identifying, categorizing, and sorting objects based on
specific criteria such as size, shape, weight, or material.
Application: Common in warehouses, recycling, and packaging industries where robots are used
to sort goods or materials for further processing.
Example: A robot sorts products based on color or weight on a conveyor belt.
d. Palletizing and Depalletizing
Description: Robots stack products onto pallets (palletizing) or remove products from stacked
pallets (depalletizing).
Application: Used in logistics, packaging, and manufacturing to automate the process of
preparing goods for storage or shipment.
Example: A robot picks finished products from a production line and places them onto a pallet
for shipment.
2. Assembly Tasks
Robots involved in assembly tasks work on joining components, either by mechanically fitting
them together, welding, or using adhesives.
a. Automated Assembly
Description: Robots autonomously assemble products by placing components in precise
positions and fastening them together.
Application: Used in the automotive, electronics, and consumer goods industries for tasks like
inserting screws, welding parts, or attaching sensors.
Example: A robot installs screws into an automotive chassis during the assembly process.
b. Welding
Description: Robots perform welding tasks, such as arc welding or spot welding, to join metal
components together.
Application: Widely used in the automotive and manufacturing sectors to create strong, precise
welds in the production of metal products.
Example: A robot performs arc welding to join metal body parts on a car assembly line.
30.
30 | Pa g e
c. Gluing and Adhesive Application
Description: Robots apply adhesives, glues, or sealants to parts in a controlled manner.
Application: Used in industries like automotive, electronics, and packaging to ensure precise and
uniform application of adhesives for assembly.
Example: A robot applies adhesive to a car windshield before fitting it into the vehicle.
3. Inspection and Testing Tasks
Robots can perform various inspection and testing tasks to ensure product quality and
compliance.
a. Visual Inspection
Description: Robots equipped with cameras or vision systems inspect products for defects,
irregularities, or damages.
Application: Used in manufacturing, food processing, and packaging industries to check the
quality of finished products.
Example: A robot uses a vision system to inspect circuit boards for defects before packaging.
b. Non-Destructive Testing (NDT)
Description: Robots perform testing on materials without damaging the product. This may
include ultrasound, X-ray, or infrared inspections.
Application: Used in industries like aerospace and automotive to check the integrity of critical
components without compromising their functionality.
Example: A robot conducts ultrasonic testing to detect cracks in an aircraft wing.
c. Dimensional Inspection
Description: Robots use measuring tools to inspect the dimensions of parts to ensure they meet
the required specifications.
Application: Common in precision manufacturing for components where tight tolerances are
required.
Example: A robot measures the dimensions of machined metal parts to verify they match the
design specifications.
4. Maintenance and Cleaning Tasks
Robots are used for maintaining equipment, cleaning facilities, or performing repairs in
hazardous environments.
a. Automated Cleaning
Description: Robots clean surfaces or equipment by performing tasks such as sweeping,
mopping, or wiping.
31.
31 | Pa g e
Application: Used in industries like food production, pharmaceutical, or semiconductor
manufacturing where cleanliness is critical.
Example: A robot autonomously cleans the floor of a factory or wipes down medical equipment.
b. Predictive Maintenance
Description: Robots and systems monitor equipment performance and predict failures before
they occur.
Application: Used in factories or power plants to keep machinery running efficiently and reduce
downtime by predicting maintenance needs.
Example: A robot monitors the health of a conveyor system and alerts operators when it needs
maintenance.
c. Remote Maintenance and Repairs
Description: Robots are used to perform maintenance tasks on equipment or in hazardous
environments where human intervention is not safe.
Application: Common in space exploration, deep-sea exploration, and hazardous material
handling.
Example: A robot is used to repair machinery in a hazardous environment like a nuclear plant or
under the ocean.
5. Autonomous Navigation Tasks
Robots can be used for autonomous movement in complex environments, navigating obstacles
and performing tasks based on their location.
a. Automated Guided Vehicles (AGVs)
Description: AGVs are mobile robots used to transport materials within a warehouse or factory
environment.
Application: Used in warehouses, manufacturing, and distribution centers to autonomously
transport materials between workstations.
Example: An AGV transports raw materials from one section of the warehouse to an assembly
line.
b. Autonomous Mobile Robots (AMRs)
Description: AMRs navigate more dynamically than AGVs, using advanced sensors (LiDAR,
cameras, etc.) to avoid obstacles and find optimal routes.
Application: Used for warehouse management, delivery, and automated inspection in large-
scale industrial facilities.
Example: A robot autonomously navigates a warehouse to deliver components to assembly
lines.
6. Human-Robot Interaction Tasks
32.
32 | Pa g e
These tasks involve robots working directly with humans in a collaborative or interactive
manner.
a. Collaborative Assembly
Description: Robots work alongside human workers to perform assembly tasks that require both
manual dexterity and robotic precision.
Application: Used in industries like electronics, automotive, and consumer goods, where robots
assist human workers without fully replacing them.
Example: A collaborative robot (cobot) helps a human worker assemble a complex product by
holding parts in place while the human completes the task.
b. Assistance in Healthcare
Description: Robots assist in healthcare by providing assistance to patients or medical
personnel.
Application: Robots help with tasks such as patient transport, medication delivery, and
providing assistance in surgeries.
Example: A robot delivers medication to patients in a hospital or assists a surgeon during a
minimally invasive procedure.
c. Teaching and Education
Description: Robots serve as educational tools to teach programming, robotics, and STEM
concepts.
Application: Used in schools or training centers to engage students in learning about robotics
and automation.
Example: A robot helps teach children how to program and understand robotics concepts in a
classroom setting.
7. Agricultural and Farming Tasks
Robots can automate various tasks in agriculture and farming to improve efficiency, reduce
labor, and enhance crop management.
a. Precision Farming
Description: Robots monitor and manage crops by planting seeds, watering, fertilizing, and
detecting pests or diseases.
Application: Used in large-scale farming to monitor crop health, optimize water use, and
increase yields.
Example: A robot equipped with sensors checks the health of crops and applies pesticides or
fertilizers only where needed.
33.
33 | Pa g e
b. Harvesting
Description: Robots are used to pick fruits, vegetables, or other crops automatically.
Application: Used in agriculture to reduce the need for human labor during harvesting.
Example: A robot picks ripe tomatoes from a field and places them into containers for transport.
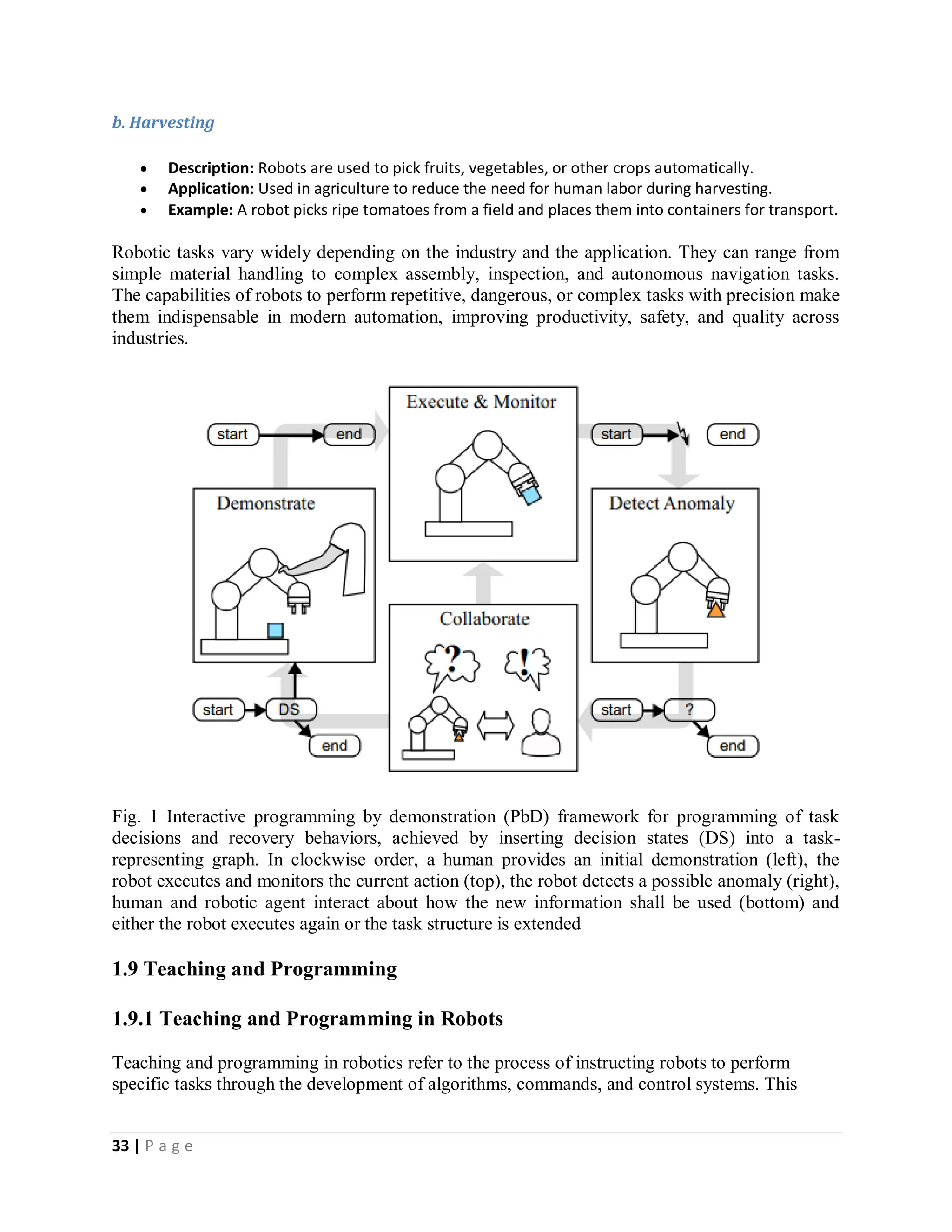
Robotic tasks vary widely depending on the industry and the application. They can range from
simple material handling to complex assembly, inspection, and autonomous navigation tasks.
The capabilities of robots to perform repetitive, dangerous, or complex tasks with precision make
them indispensable in modern automation, improving productivity, safety, and quality across
industries.
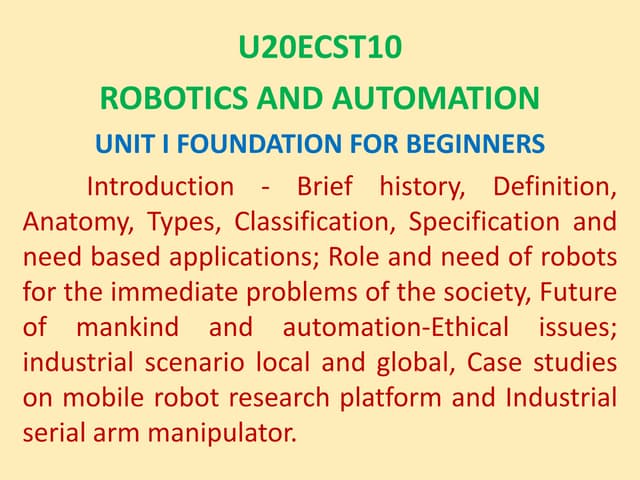
Fig. 1 Interactive programming by demonstration (PbD) framework for programming of task
decisions and recovery behaviors, achieved by inserting decision states (DS) into a task-
representing graph. In clockwise order, a human provides an initial demonstration (left), the
robot executes and monitors the current action (top), the robot detects a possible anomaly (right),
human and robotic agent interact about how the new information shall be used (bottom) and
either the robot executes again or the task structure is extended
1.9 Teaching and Programming
1.9.1 Teaching and Programming in Robots
Teaching and programming in robotics refer to the process of instructing robots to perform
specific tasks through the development of algorithms, commands, and control systems. This
34.
34 | Pa g e
process involves both manual and automated methods of input, depending on the complexity of
the tasks and the level of automation required.
Robotic systems are programmed to carry out tasks by providing instructions that guide their
movements, actions, and decision-making capabilities. The teaching of robots involves both
physical interaction (in the case of teach pendant programming) and software-based
programming. Let's break this down further into its various aspects.
1.9.2. Teaching Robots
Teaching robots refers to the process of manually guiding a robot through its tasks so it can
learn the required movements and actions. This can be done in two main ways:
a. Manual Teaching (Teach Pendant)
Description: In this method, an operator manually moves the robot arm or manipulator through
the desired motions using a teach pendant, a handheld device that allows operators to control the
robot's movements in real-time. The robot records these movements to be executed autonomously
later.
Process:
o The operator physically guides the robot to the desired position and orientation.
o The robot stores the positions, which are then saved as part of its program.
o Once all movements are taught, the robot can repeat these motions without human input.
Application: Common in industrial settings where robots need to perform repetitive tasks such as
welding, assembly, or material handling.
Example: A robot is manually guided to pick up a part from a conveyor belt and place it on a
machine. The positions and movements are recorded, and the robot can repeat the process
independently afterward.
b. Lead-Through Programming (Walking Through)
Description: In lead-through programming, a robot is physically moved or guided by a human
operator, similar to manual teaching, but with fewer constraints. The robot learns the sequence of
actions through this direct interaction, and the operator can specify key points in the process.
Process:
o The operator walks the robot through the task step-by-step, guiding it from one location
to the next.
o The robot records the movement in real-time and stores it as part of its task sequence.
Application: Often used in environments where tasks require a high level of adaptability and
changes in environment.
Example: A robot used for flexible manufacturing might be taught to handle different sizes of
parts by manually guiding it to each position and saving those movements.
1.9.3. Programming Robots
35.
35 | Pa g e
Programming robots refers to writing software that provides the robot with instructions on how
to perform tasks, make decisions, and interact with its environment. There are different ways to
program robots, from traditional coding to graphical interfaces, depending on the robot's
capabilities and application.
a. Traditional Programming (Code-Based)
Description: Robots are programmed using specific programming languages. This method
provides high flexibility and control over the robot's behavior and operations. The most common
languages include LISP, C/C++, Python, Java, and ROS (Robot Operating System).
Process:
o The programmer writes a code that defines the tasks, motions, logic, and interactions of
the robot.
o The code is compiled and uploaded to the robot's controller.
o The robot executes the tasks defined by the programmer.
Applications: Ideal for robots involved in complex tasks such as autonomous navigation, multi-
robot coordination, and artificial intelligence-based decision-making.
Example: A robot for warehouse management might be programmed to navigate through aisles,
pick specific items, and transport them to a designated location using C++ or Python.
b. Graphical Programming (Block-Based)
Description: Graphical programming is a simpler, more intuitive method of robot programming.
It uses a visual interface where users drag and drop programming blocks that represent actions or
tasks. Popular examples of graphical programming environments are LabVIEW, Blockly, and
VEX Robotics.
Process:
o The programmer uses a visual interface to assemble a sequence of instructions by
dragging and connecting blocks.
o Each block represents an action or decision (e.g., move forward, turn left, stop, etc.).
o Once the sequence is complete, the program is uploaded to the robot.
Applications: Often used for educational purposes or when the robot performs relatively simple
tasks.
Example: Programming a robot to follow a line using blocks in a visual programming
environment, commonly used in educational settings for STEM learning.
c. Robot Operating System (ROS)
Description: ROS is an open-source framework that provides libraries and tools to help
developers create robot applications. It provides an environment for the development of advanced
robotic behaviors, including motion planning, perception, and multi-robot communication.
Process:
o ROS allows developers to program robots by integrating various functionalities through
software packages.
o Developers can write scripts using languages like Python or C++ to interact with ROS
nodes (individual components or processes in the ROS network).
o ROS helps robots perceive their environment and make intelligent decisions.
Applications: Used in research, complex industrial applications, autonomous vehicles, and
service robots.
36.
36 | Pa g e
Example: A robot equipped with cameras and sensors can use ROS to map its surroundings,
detect objects, and plan its path autonomously.
1.9.4. Teaching Robots Using AI and Machine Learning
Advances in artificial intelligence (AI) and machine learning (ML) have enabled robots to
learn tasks through experiences, similar to how humans learn. In such systems, robots can
improve their performance over time by trial and error or by processing large datasets to
understand patterns.
a. Reinforcement Learning
Description: In reinforcement learning (RL), a robot learns to perform tasks by interacting with
its environment and receiving rewards or penalties based on its actions. Over time, the robot
improves its behavior by optimizing for the best rewards.
Process:
o The robot performs actions and receives feedback (rewards or penalties).
o It updates its decision-making strategy based on this feedback to maximize rewards.
o The robot may explore a variety of actions and strategies, learning the optimal way to
perform the task.
Application: This method is used in autonomous vehicles, robots performing complex
manipulation tasks, and robots in unpredictable environments.
Example: A robot arm used for pick-and-place tasks might use RL to improve its success rate in
picking and placing items by experimenting with different strategies for gripping and positioning.
b. Imitation Learning
Description: Imitation learning involves teaching robots by demonstrating the desired tasks. The
robot learns by observing human actions and replicating them.
Process:
o A human demonstrates the task, and the robot observes and mimics the motions or
actions.
o The robot may use vision systems or sensors to capture human demonstrations.
o Over time, the robot refines its actions based on feedback to improve performance.
Application: Imitation learning is commonly used in tasks where human-like dexterity or
adaptability is required, such as in healthcare robots or manufacturing.
Example: A robot learns to fold towels by watching a human and imitating the motions.
1.9.5. Key Methods for Teaching and Programming Robots
Teach Pendant Programming: A manual approach where the operator guides the robot through
its motions using a teach pendant.
Offline Programming: Robots are programmed using a simulation environment before being
deployed, which is useful for complex systems where live programming is difficult.
Graphical Programming: Simple, block-based visual programming environments used
primarily for educational or straightforward tasks.
AI and Machine Learning: Robots can learn tasks through interaction with their environment or
by imitating human behavior, becoming increasingly efficient over time.
37.
37 | Pa g e
ROS: A software framework that allows for complex robot behavior programming, widely used
in advanced and research applications.
Teaching and programming robots is essential for automating tasks, improving efficiency, and
making robots adaptable to various industries and environments. While traditional programming
methods provide flexibility and control, new developments in AI and machine learning are
allowing robots to learn autonomously through interaction and experience. The choice of
teaching or programming method depends on the robot's complexity, the specific tasks it must
perform, and the environment in which it operates. Whether it's guiding a robot through motions,
coding its actions, or allowing it to learn through AI, teaching and programming are critical
components in the development and deployment of modern robotic systems.
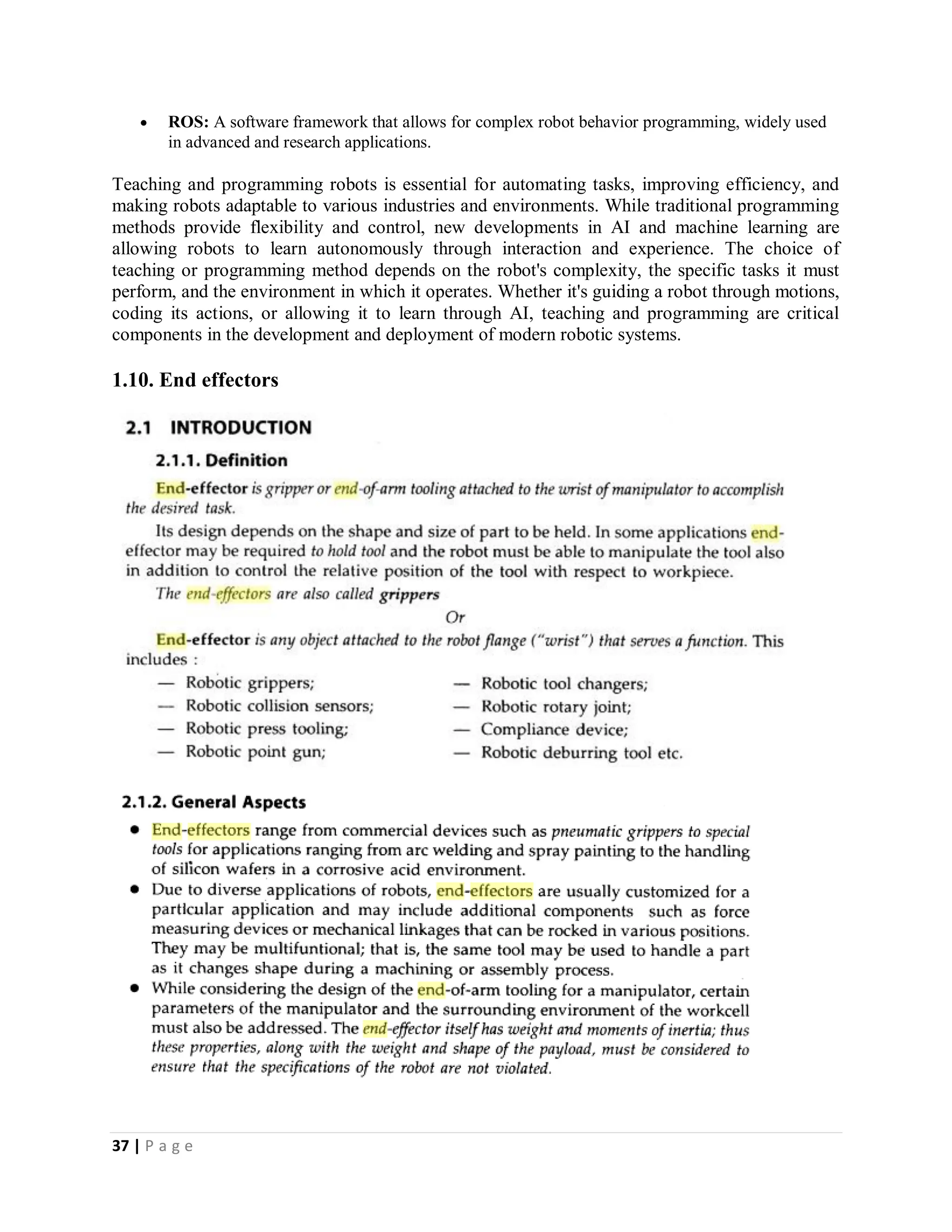
1.10. End effectors
48 | Pa g e
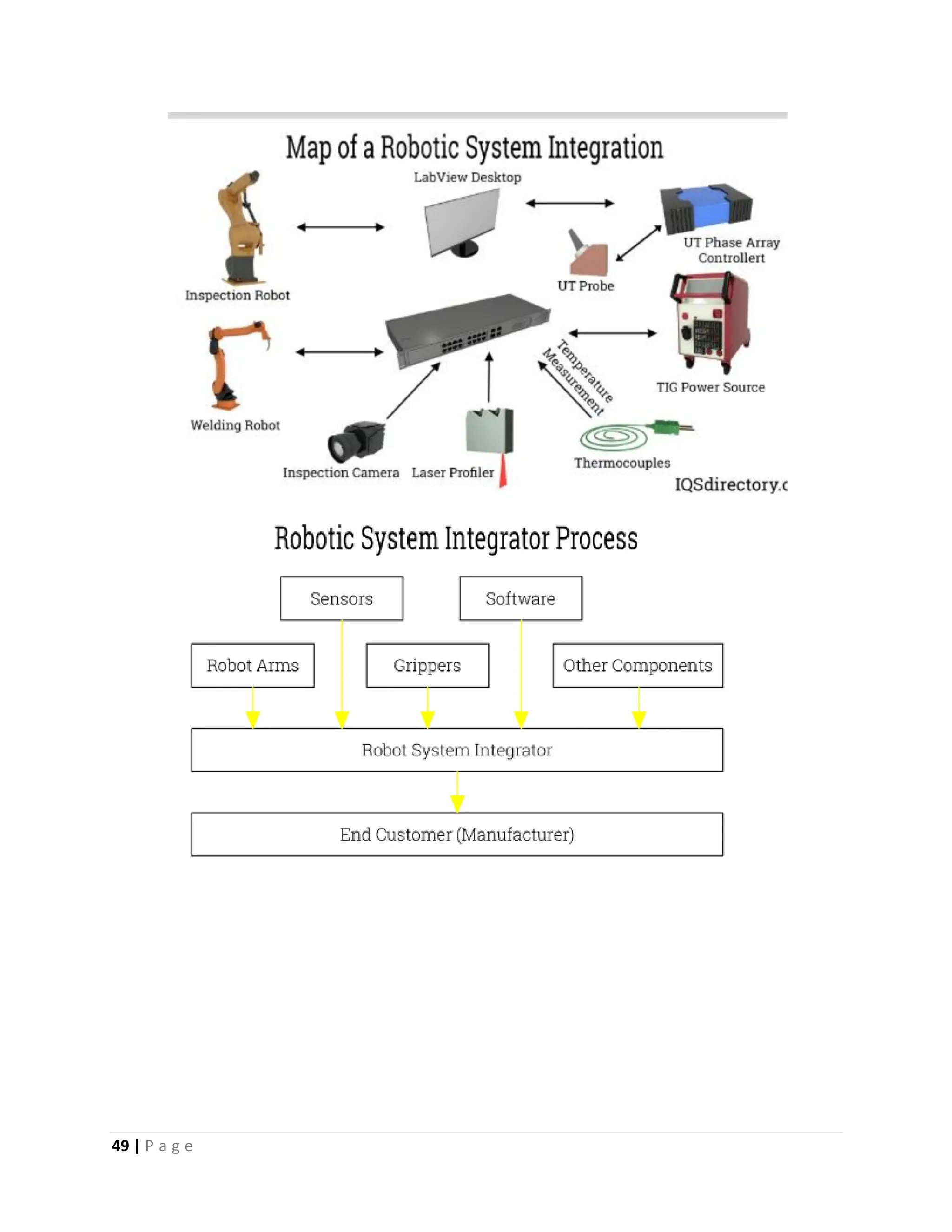
1.11 System Integration
Robotic system integrators specialize in assisting companies with automating various
applications. They design robotic technologies tailored to meet the specific needs of an operation
and provide solutions for integrating robotics into industrial processes. While robot
manufacturers produce countless robotic solutions for diverse applications, these are generally
designed for broad use.
Robot manufacturers depend on robotic system integrators to leverage their expertise in helping
end users select the right robotic solution for specific conditions. Robotic system integrators are
crucial in channeling, distributing, and developing automated robotic solutions.
Each robot integrator specializes in a specific set of solutions, as it is impossible for one
integrator to have an answer for every situation. Integrators are selected based on the process
they are integrating and their skill set's suitability for the application. Their selection also
depends on their track record of success in providing solutions for that particular application.
The focus of robot system integrators varies between material handling, warehousing, and supply
chain robots and ones for manufacturing, production, and assembly. Customers choose a robot
system integrator dependent on the integrator’s specialty.





























































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)


