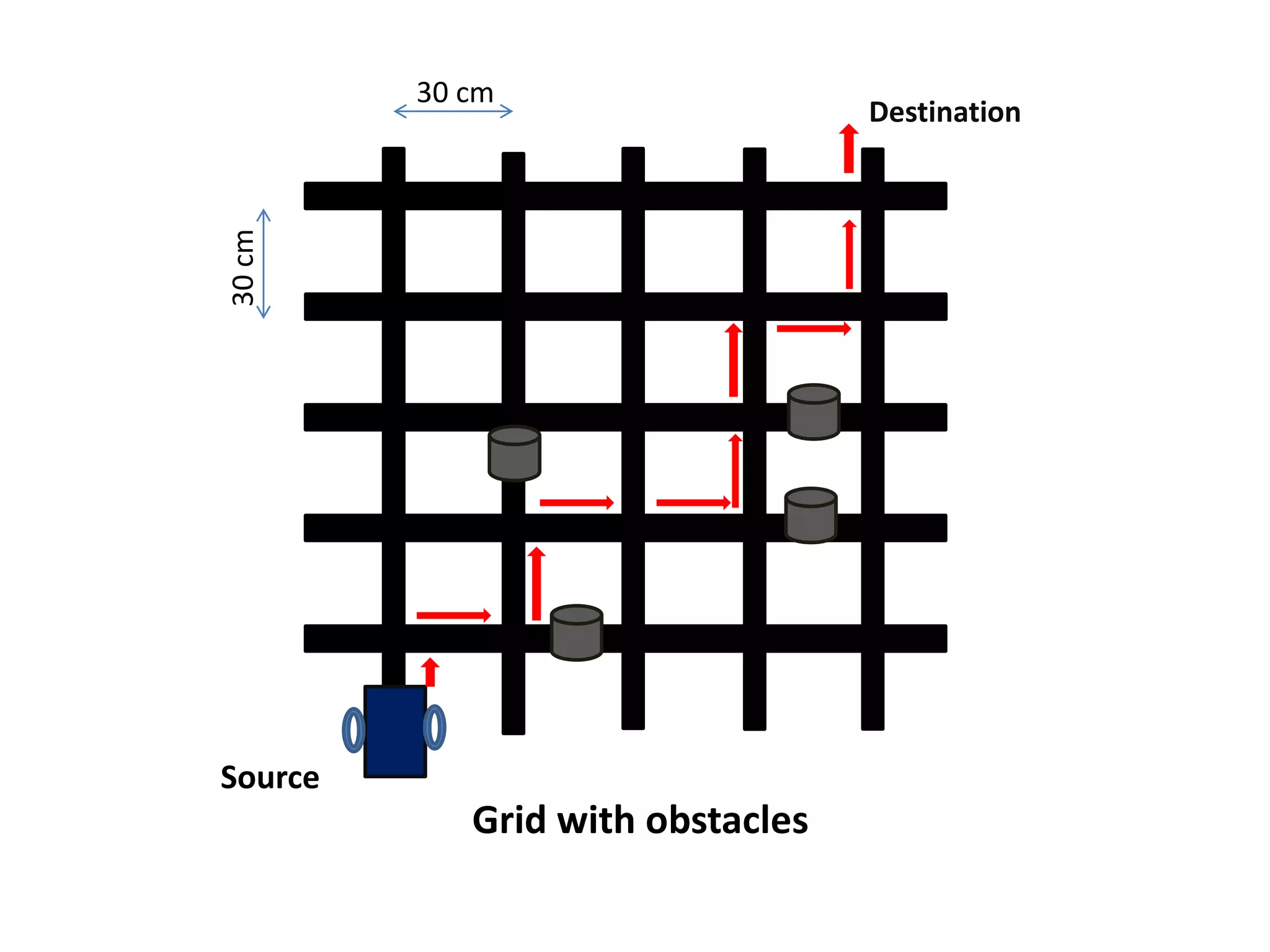
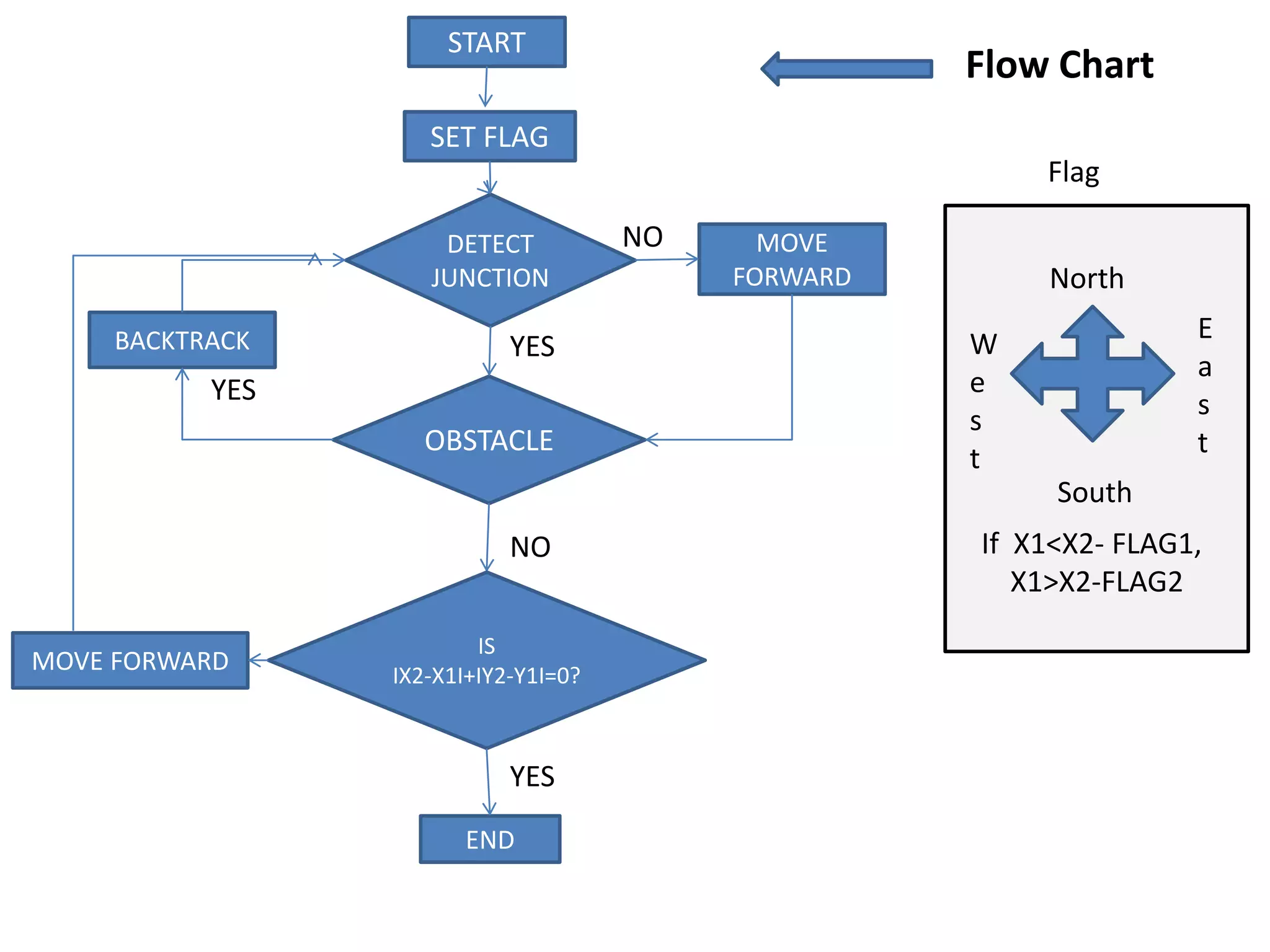
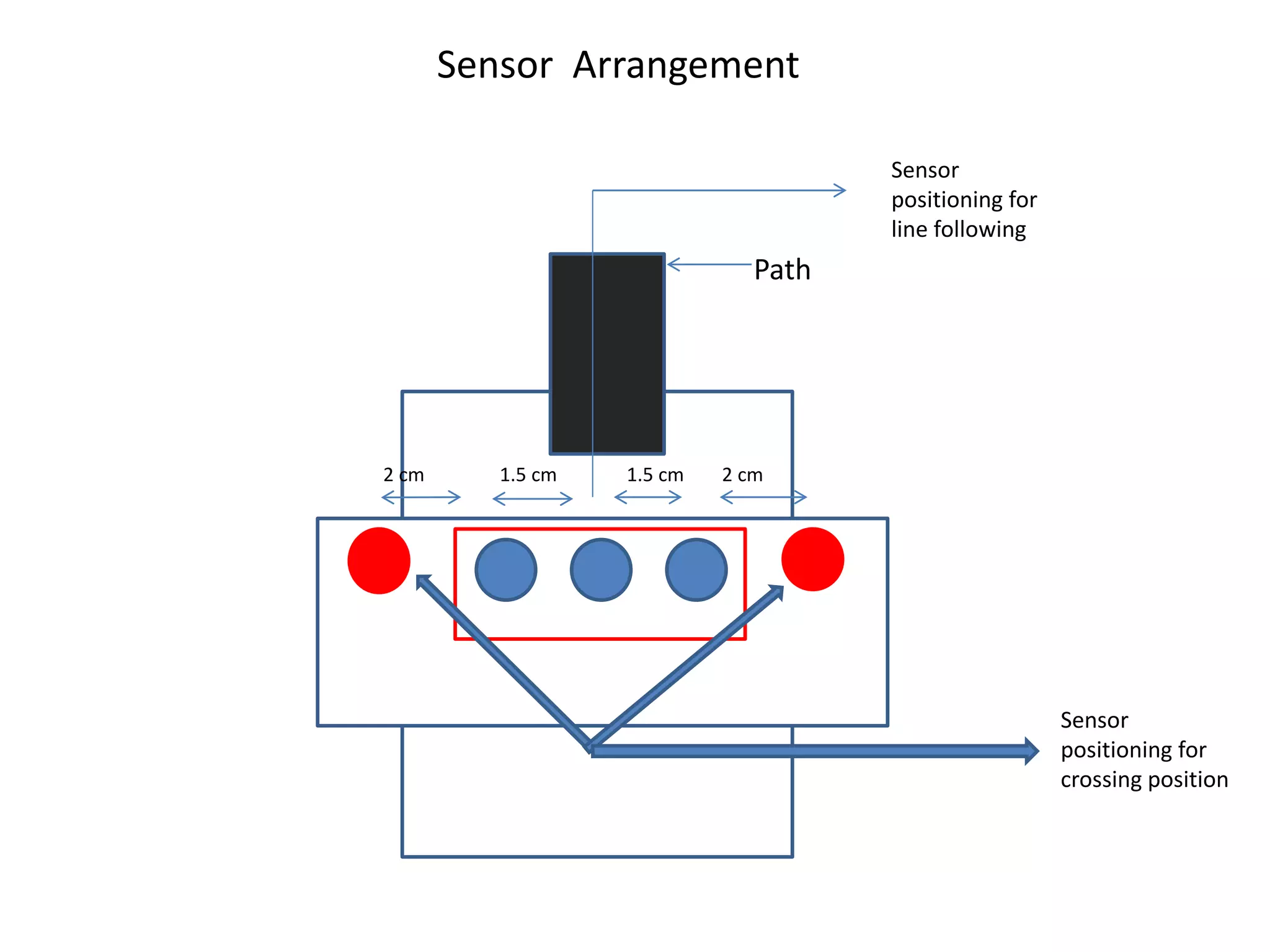
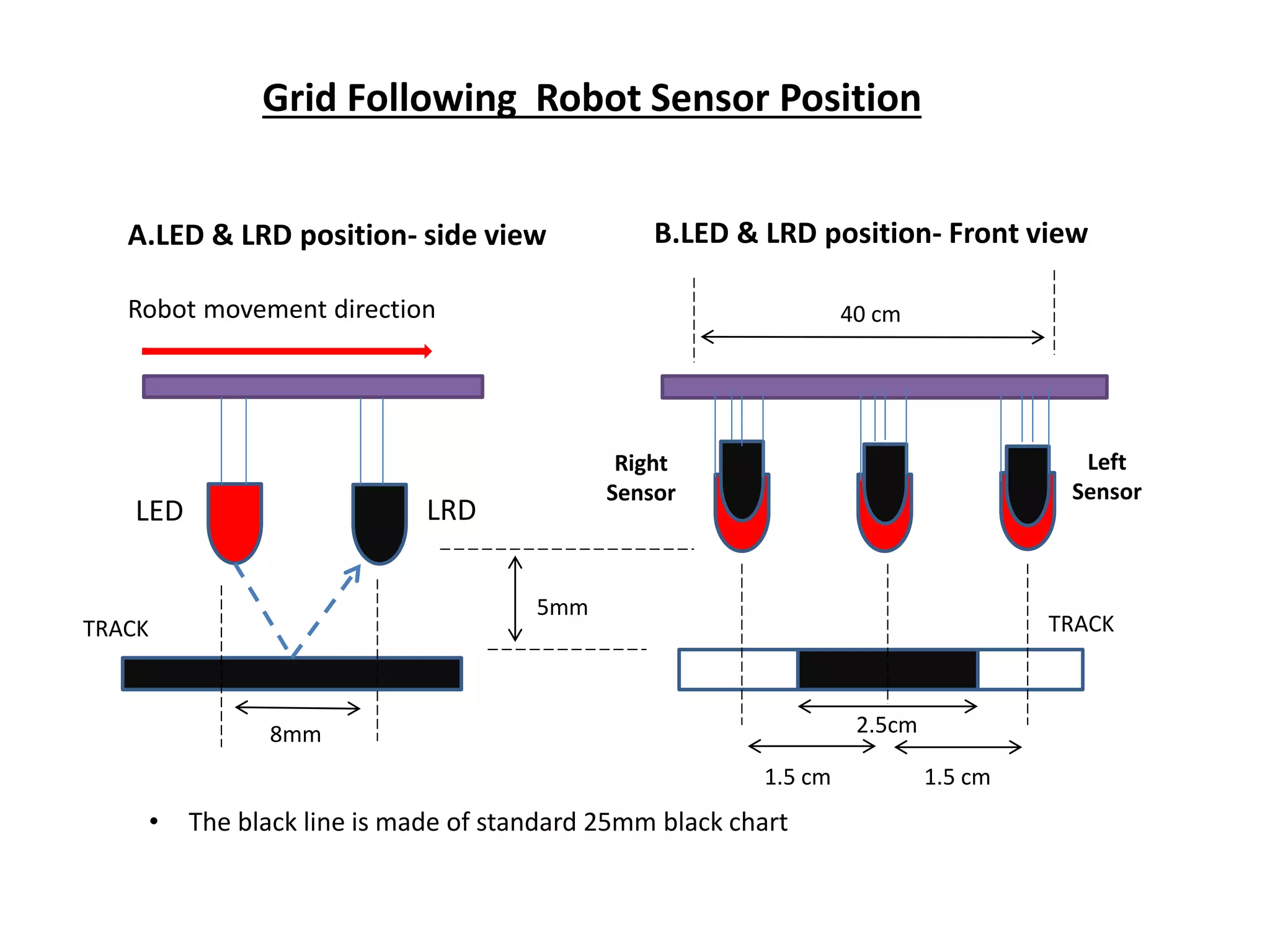
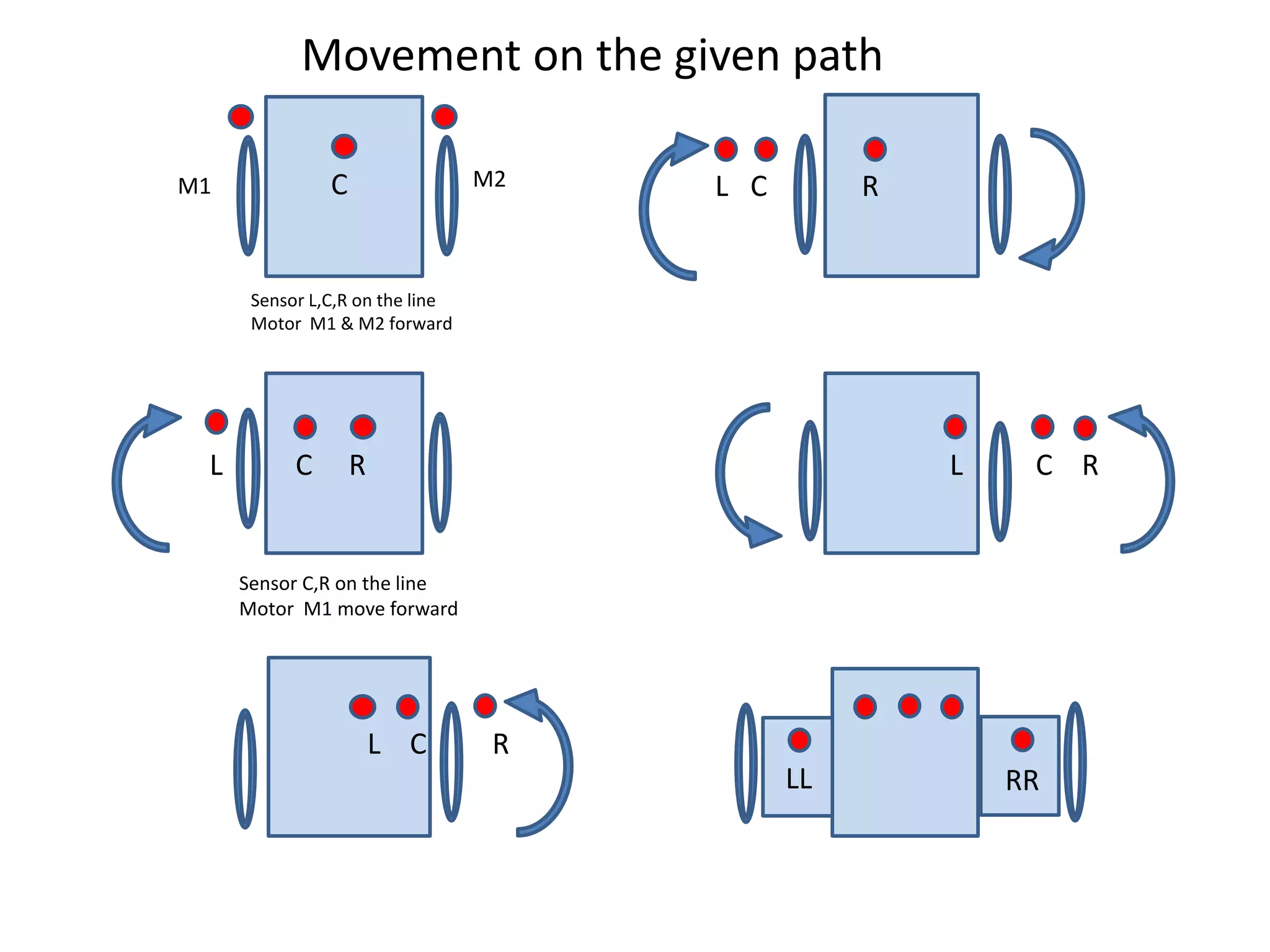
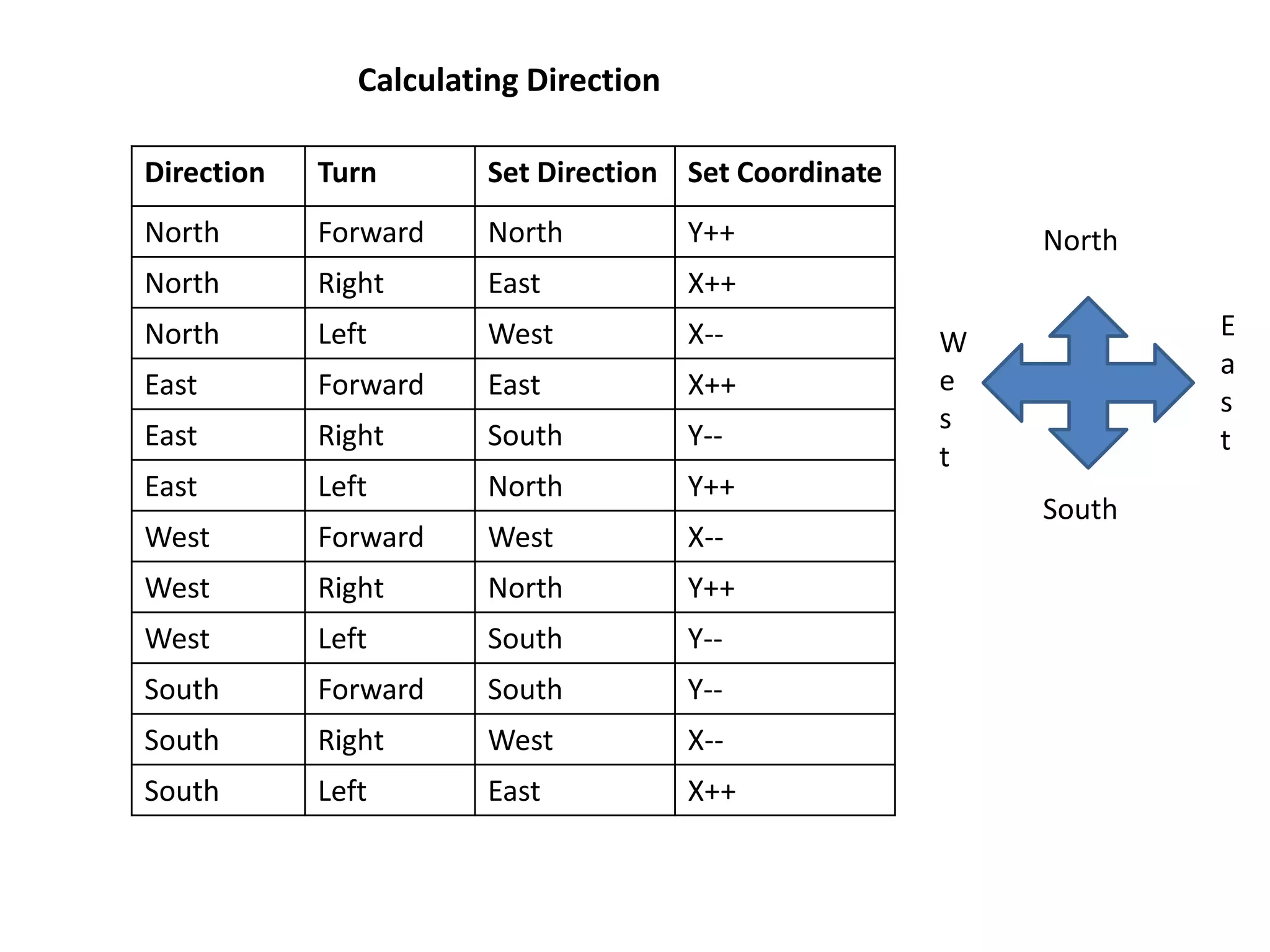
This document discusses the intelligent path navigation and control for automated guided vehicles (AGVs). The objective is for AGVs to navigate autonomously from a given source to destination using a grid-based approach while detecting and maneuvering around obstacles. The summary describes the hardware components, including the chassis, DC motors, sensors, and Arduino platform. It also provides an overview of the software design, algorithms, and sensor arrangement used for grid solving and line following applications to allow the AGVs to navigate intelligently and reach the destination autonomously.

![References:
[1].people.ece.cornell.edu/land/courses/ece4760/Final
Projects/s2007/jxd2/djd36_jxd2/neuralrobot.htm
[2].Genci Capi, Member, IEEE Mitsuki Kitani, Zulkifli Mohamed- Simultaneous
Evolution of Neural Controllers for Multi Robot Formation Control
[3].Dean A. Pomerleau, Carnegie Mellon University, School of Computer
Science, Knowledge-based Training of Artificial Neural Networks for
Autonomous Robot Driving
[4].en.wikipedia.org/human computer interaction
[5].Robot Modeling and Control-Mark w. Spong,Seth Hutchinson, M
Vidyasagar,WILEY STUDENT EDITION.](https://image.slidesharecdn.com/9a400f49-e501-4914-831b-452843a9d394-151103150509-lva1-app6891/75/Presentation1-2-20-2048.jpg)