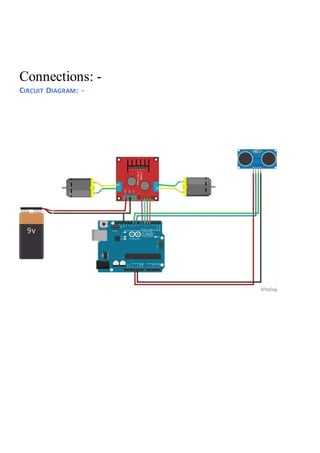
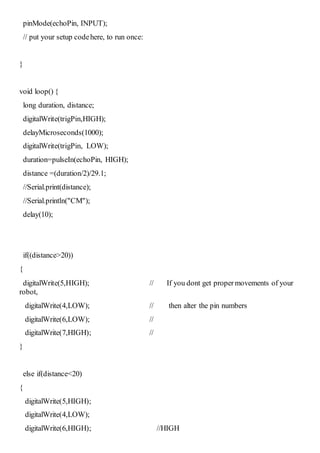
This document describes an obstacle avoiding robot. The robot uses an Arduino Uno microcontroller, ultrasonic sensor, DC motors, motor driver module, and other components. It measures distance to obstacles using the ultrasonic sensor and triggers different motor movements to avoid obstacles. The connections and code are provided to trigger the motors to move forward when no obstacle is detected and turn when an obstacle is close, helping the robot avoid collisions during movement.