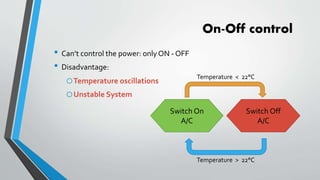
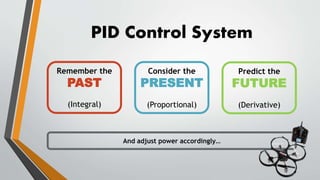
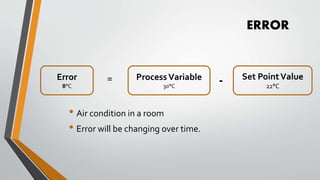
The document discusses feedback control systems, particularly in relation to maintaining constant temperatures in an air conditioner using PID (Proportional-Integral-Derivative) control strategies. It explains the importance of tuning control parameters (kp, ki, kd) to minimize oscillations, relaxation time, and steady-state error. The applications of such control systems extend to various technologies, including quadcopters and self-driving cars.