3. モデル
アルゴリズム
10
Extended Kalmanfilter(µt 1, t 1, ut, zt)
µt = g(ut, µt 1)
Kt = tHT
t (Ht tHT
t + Qt) 1
µt = µt + Kt(zt h(µt))
t = (I KtHt) t
return µt, t
t = Gt t 1GT
t + Rt
11.
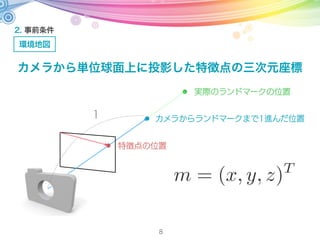
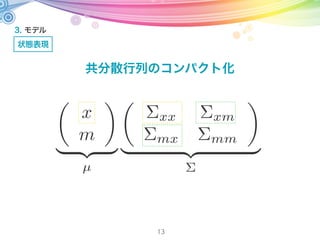
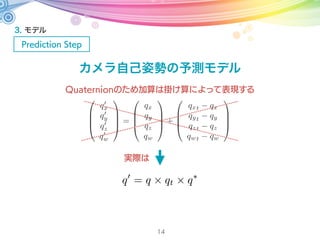
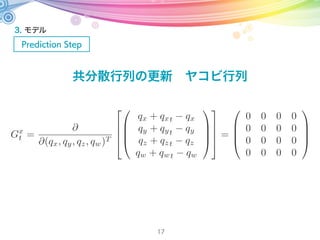
3. モデル
状態空間
11
EKF SLAMの状態空間
xt= (qx, qy, qz, qw
Camera s OR
, m1,x, m1,y, m1,z
landmark 1
, ..., mn,x, mn,y, mn,z
landmark n
)T
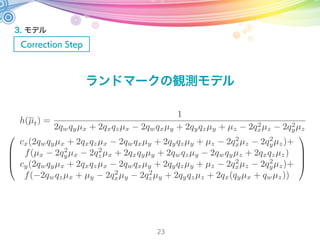
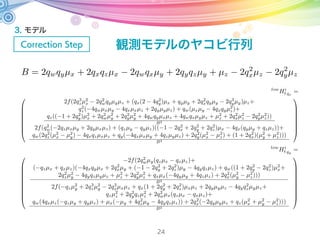
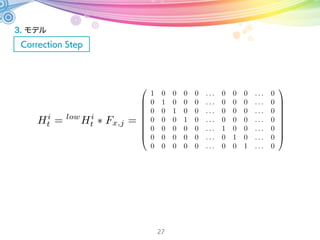
3. モデル
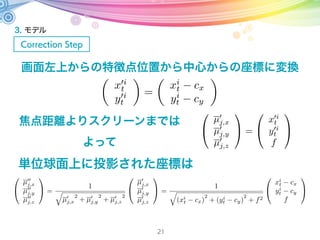
Correction Step
31
Qt=
2
x 0
0 2
y
for all observed features zi
t = (xi
t, yi
t)T
do
j = ci
t
if landmark j never seen before
xi
t cx
f2+(xi
t cx)2+(yi
t cy)2
yi
t cy
f2+(xi
t cx)2+(yi
t cy)2
f
f2+(xi
t cx)2+(yi
t cy)2
µj,x
µj,y
µj,z
=
µ2
t,qw
+ µ2
t,qx
µ2
t,qy
µ2
t,qz
2(µt,qx
µt,qy
µt,qw
µt,qz
) 2(µt,qx
µt,qz
+ µt,qw
µt,qy
)
2(µt,qx
µt,qy
+ µt,qw
µt,qz
) µ2
t,qw
µ2
t,qx
+ µ2
t,qy
µ2
t,qz
2(µt,qy
µt,qz
µt,qw
µt,qx
)
2(µt,qx
µt,qz
µt,qw
µt,qy
) 2(µt,qy
µt,qz
+ µt,qw
µt,qx
) µ2
t,qw
µ2
t,qx
µ2
t,qy
+ µ2
t,qz
endif
6:
5:
7:
EKF SLAM CorrectionEKF SLAM Prediction(µt 1, t 1, ut, zt, ct, Rt)Rx
t )
32.
3. モデル
Correction Step
32
zi
t=
cx(2µt,qw µt,qy µj,x + 2µt,qx µt,qz µj,x 2µt,qw µt,qx µj,y+
2µt,qy µt,qz µj,y + µj,z 2µ2
t,qx
µj,z 2µ2
t,qy
µj,z)+
f(µj,x 2µ2
t,qy
µj,x 2µ2
t,qz
µj,x + 2µt,qx µt,qy µj,y+
2µt,qw µt,qz µj,y 2µt,qw µt,qy µj,z + 2µt,qx µt,qz µj,z)
2µt,qw µt,qy µj,x+2µt,qx µt,qz µj,x 2µt,qw µt,qx µj,y+2µt,qy µt,qz µj,y+µj,z 2µ2
t,qx
µj,z 2µ2
t,qy
µj,z
cy(2µt,qw µt,qy µj,x + 2µt,qx µt,qz µj,x 2µt,qw µt,qx µj,y+
2µt,qy
µt,qz
µj,y + µj,z 2µ2
t,qx
µj,z 2µ2
t,qy
µj,z)+
f( 2µt,qw µt,qz µj,x + µj,y 2µ2
t,qx
µj,y 2µ2
t,qz
µj,y+
2µt,qy µt,qz µj,z + 2µt,qx (µt,qy µj,x + µt,qw µj,z)
2µt,qw µt,qy µj,x+2µt,qx µt,qz µj,x 2µt,qw µt,qx µj,y+2µt,qy µt,qz µj,y+µj,z 2µ2
t,qx
µj,z 2µ2
t,qy
µj,z
Ki
t = tHi
t
T
(Hi
t tHi
t
T
+ Qt) 1
µt = µt + Ki
t(zi
t zi
t) =
µt,q Ki
t,q(zi
t zi
t)
...
µt,v + Ki
t,v(zi
t zi
t)
...
8:
9:
10: