Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
nonane
PDF, PPTX
1,169 views
コンピュータビジョン最先端ガイド6 第2章:4~4.2節
第39回コンピュータビジョン勉強会@関東 第二章:幾何学的推定のための最適化手法:最小化を超えて 4. 最小化に基づかない方法 4.1 重み反復法 4.2 くりこみ法
Science
◦
Read more
2
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 22
2
/ 22
3
/ 22
4
/ 22
5
/ 22
6
/ 22
7
/ 22
8
/ 22
9
/ 22
10
/ 22
11
/ 22
12
/ 22
13
/ 22
14
/ 22
15
/ 22
16
/ 22
17
/ 22
18
/ 22
19
/ 22
20
/ 22
21
/ 22
22
/ 22
More Related Content
PDF
データ解析14 ナイーブベイズ
by
Hirotaka Hachiya
PPTX
劣モジュラ最適化と機械学習 2.4節
by
Hakky St
PDF
NIPS2016論文紹介 Riemannian SVRG fast stochastic optimization on riemannian manif...
by
Takami Sato
PDF
Non-autoregressive text generation
by
nlab_utokyo
PPTX
計算化学実習講座:第一回
by
Maho Nakata
PDF
ブースティング入門
by
Retrieva inc.
PDF
合成経路探索 -論文まとめ- (PFN中郷孝祐)
by
Preferred Networks
PDF
ベンダーズの分解法
by
Takahiro Suzuki
データ解析14 ナイーブベイズ
by
Hirotaka Hachiya
劣モジュラ最適化と機械学習 2.4節
by
Hakky St
NIPS2016論文紹介 Riemannian SVRG fast stochastic optimization on riemannian manif...
by
Takami Sato
Non-autoregressive text generation
by
nlab_utokyo
計算化学実習講座:第一回
by
Maho Nakata
ブースティング入門
by
Retrieva inc.
合成経路探索 -論文まとめ- (PFN中郷孝祐)
by
Preferred Networks
ベンダーズの分解法
by
Takahiro Suzuki
What's hot
PDF
確率統計-機械学習その前に v2.0
by
Hidekatsu Izuno
PDF
深層学習 第6章
by
KCS Keio Computer Society
PDF
ディープボルツマンマシン入門
by
Saya Katafuchi
PDF
NIPS KANSAI Reading Group #7: 逆強化学習の行動解析への応用
by
Eiji Uchibe
PDF
深層学習 勉強会第5回 ボルツマンマシン
by
Yuta Sugii
PDF
PRML輪読#1
by
matsuolab
PDF
ベイズ最適化
by
MatsuiRyo
PPTX
5分でわかるベイズ確率
by
hoxo_m
PDF
Suphx: Mastering Mahjong with Deep Reinforcement Learning
by
harmonylab
PDF
[DL輪読会]Deep Learning 第2章 線形代数
by
Deep Learning JP
PPTX
数学カフェAdvent calendar2017 12_18〜圏論に於ける準同型定理〜
by
aaaa mmmm
PPTX
計算化学実習講座:第二回
by
Maho Nakata
PDF
劣モジュラ最適化と機械学習 2.0-2.3 劣モジュラ関数の基本性質・例・最適化
by
Akiyoshi Hara
PDF
強化学習その3
by
nishio
PDF
東京都市大学 データ解析入門 5 スパース性と圧縮センシング 2
by
hirokazutanaka
PPTX
R6パッケージの紹介―機能と実装
by
__nakamichi__
PDF
PRML 2.3節 - ガウス分布
by
Yuki Soma
PDF
CVIM最先端ガイド6 幾何学的推定のための最適化手法 3.5 - 3.8
by
Fujimoto Keisuke
PPTX
モンテカルロ法と情報量
by
Shohei Miyashita
PDF
Python 機械学習プログラミング データ分析ライブラリー解説編
by
Etsuji Nakai
確率統計-機械学習その前に v2.0
by
Hidekatsu Izuno
深層学習 第6章
by
KCS Keio Computer Society
ディープボルツマンマシン入門
by
Saya Katafuchi
NIPS KANSAI Reading Group #7: 逆強化学習の行動解析への応用
by
Eiji Uchibe
深層学習 勉強会第5回 ボルツマンマシン
by
Yuta Sugii
PRML輪読#1
by
matsuolab
ベイズ最適化
by
MatsuiRyo
5分でわかるベイズ確率
by
hoxo_m
Suphx: Mastering Mahjong with Deep Reinforcement Learning
by
harmonylab
[DL輪読会]Deep Learning 第2章 線形代数
by
Deep Learning JP
数学カフェAdvent calendar2017 12_18〜圏論に於ける準同型定理〜
by
aaaa mmmm
計算化学実習講座:第二回
by
Maho Nakata
劣モジュラ最適化と機械学習 2.0-2.3 劣モジュラ関数の基本性質・例・最適化
by
Akiyoshi Hara
強化学習その3
by
nishio
東京都市大学 データ解析入門 5 スパース性と圧縮センシング 2
by
hirokazutanaka
R6パッケージの紹介―機能と実装
by
__nakamichi__
PRML 2.3節 - ガウス分布
by
Yuki Soma
CVIM最先端ガイド6 幾何学的推定のための最適化手法 3.5 - 3.8
by
Fujimoto Keisuke
モンテカルロ法と情報量
by
Shohei Miyashita
Python 機械学習プログラミング データ分析ライブラリー解説編
by
Etsuji Nakai
Similar to コンピュータビジョン最先端ガイド6 第2章:4~4.2節
PDF
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
PPTX
Cvim saisentan-ellipse-publish
by
tomoaki0705
PPTX
20170408 cv geometric_estimation_1-2.2
by
Kyohei Unno
PDF
20170408cvsaisentan6 2 4.3-4.5
by
Takuya Minagawa
PDF
PRML復々習レーン#3 3.1.3-3.1.5
by
sleepy_yoshi
PDF
Icp3.2 takmin
by
Takuya Minagawa
PDF
L0TV: a new method for image restoration in the presence of impulse noise
by
Fujimoto Keisuke
PDF
PRML 6.1章 カーネル法と双対表現
by
hagino 3000
PDF
PRML 5.2.1-5.3.3 ニューラルネットワークの学習 (誤差逆伝播) / Training Neural Networks (Backpropa...
by
Akihiro Nitta
PDF
生物統計特論3資料 2006 ギブス MCMC isseing333
by
Issei Kurahashi
PDF
Re revenge chap03-1
by
裕樹 奥田
PDF
オンライン凸最適化と線形識別モデル学習の最前線_IBIS2011
by
Preferred Networks
PDF
2011建築研究賞_最適化手法を用いた建物の同定問題_08N1002青山仁美/08N1038小祝碧_吉田研
by
110484
PDF
Sparse models
by
Daisuke Yoneoka
PDF
Crfと素性テンプレート
by
Kei Uchiumi
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
PDF
パターン認識第9章 学習ベクトル量子化
by
Miyoshi Yuya
PDF
PRML復々習レーン#9 前回までのあらすじ
by
sleepy_yoshi
PDF
はじめてのパターン認識 第8章 サポートベクトルマシン
by
Motoya Wakiyama
PDF
PRML復々習レーン#7 前回までのあらすじ
by
sleepy_yoshi
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
Cvim saisentan-ellipse-publish
by
tomoaki0705
20170408 cv geometric_estimation_1-2.2
by
Kyohei Unno
20170408cvsaisentan6 2 4.3-4.5
by
Takuya Minagawa
PRML復々習レーン#3 3.1.3-3.1.5
by
sleepy_yoshi
Icp3.2 takmin
by
Takuya Minagawa
L0TV: a new method for image restoration in the presence of impulse noise
by
Fujimoto Keisuke
PRML 6.1章 カーネル法と双対表現
by
hagino 3000
PRML 5.2.1-5.3.3 ニューラルネットワークの学習 (誤差逆伝播) / Training Neural Networks (Backpropa...
by
Akihiro Nitta
生物統計特論3資料 2006 ギブス MCMC isseing333
by
Issei Kurahashi
Re revenge chap03-1
by
裕樹 奥田
オンライン凸最適化と線形識別モデル学習の最前線_IBIS2011
by
Preferred Networks
2011建築研究賞_最適化手法を用いた建物の同定問題_08N1002青山仁美/08N1038小祝碧_吉田研
by
110484
Sparse models
by
Daisuke Yoneoka
Crfと素性テンプレート
by
Kei Uchiumi
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
パターン認識第9章 学習ベクトル量子化
by
Miyoshi Yuya
PRML復々習レーン#9 前回までのあらすじ
by
sleepy_yoshi
はじめてのパターン認識 第8章 サポートベクトルマシン
by
Motoya Wakiyama
PRML復々習レーン#7 前回までのあらすじ
by
sleepy_yoshi
コンピュータビジョン最先端ガイド6 第2章:4~4.2節
1.
2011-04-08 伊神 大貴 @_Nonane_ コンピュータビジョン最先端ガイド6巻 幾何学的推定のための最適化手法: 最小化を超えて 4~4.2節
2.
いろいろ 2 担当範囲:4~4.2節 -計2.7ページ 本日参加した理由 「最尤推定解の精度がさらに向上する」 「幾何学的推定は評価関数の最小化に基づく必要 はない」 研究 ロバスト推定,非凸問題の大域的最適化 -理論派ではなく感覚派(?) 所属: 東京大学 相澤・山崎研究室 博士課程2年
3.
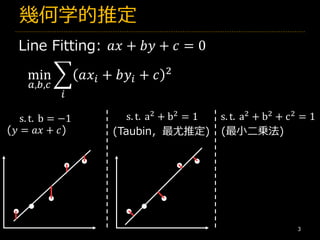
幾何学的推定 3 Line Fitting: 𝑎𝑥
+ 𝑏𝑦 + 𝑐 = 0 min 𝑎,𝑏,𝑐 𝑖 𝑎𝑥𝑖 + 𝑏𝑦𝑖 + 𝑐 2 s. t. b = −1 s. t. a2 + b2 = 1 s. t. a2 + b2 + c2 = 1 (最小二乗法)(Taubin,最尤推定)(𝑦 = 𝑎𝑥 + 𝑐)
4.
幾何学的推定 4 Line Fitting: 𝑎𝑥
+ 𝑏𝑦 + 𝑐 = 0 min 𝑎,𝑏,𝑐 𝑖 𝑎𝑥𝑖 + 𝑏𝑦𝑖 + 𝑐 2 s. t. b = −1 s. t. a2 + b2 = 1 s. t. a2 + b2 + c2 = 1 (最小二乗法)(Taubin,最尤推定)(𝑦 = 𝑎𝑥 + 𝑐)
5.
幾何学的推定 5 s. t. a2
+ b2 = 1 (Taubin,最尤推定) 点と直線の距離: 𝑑𝑖 = 𝑎𝑥𝑖 + 𝑏𝑦𝑖 + 𝑐 𝑎2 + 𝑏2 min 𝑎,𝑏,𝑐 𝑖 𝑎𝑥𝑖 + 𝑏𝑦𝑖 + 𝑐 2 𝑎2 + 𝑏2 = min 𝛉 𝑖 𝛏𝑖, 𝛉 2 𝛉, 𝐕0 𝛉 𝛉 = 𝑎, 𝑏, 𝑐 𝛏𝑖 = 𝑥𝑖, 𝑦𝑖, 1 𝐕0 = 1 0 0 0 1 0 0 0 0 𝛉, 𝐕0 𝛉 = 𝑎2 + 𝑏2 = min 𝛉 𝑖 𝛏𝑖, 𝛉 2 s. t. 𝛉, 𝐕0 𝛉 = 1
6.
幾何学的推定 6 Circle Fitting: = 𝑎 𝑥
𝑖 2 +𝑦𝑖 2 +𝑏 2 4𝑎2 𝑥 𝑖 2+𝑦𝑖 2 :サンプソン距離 min 𝑎,𝑏 𝑖 𝑎 𝑥𝑖 2 + 𝑦𝑖 2 + 𝑏 2 4𝑎2 𝑥𝑖 2 + 𝑦𝑖 2 = min 𝛉 𝑖 𝛏𝑖, 𝛉 2 𝛉, 𝐕0[𝛏𝑖]𝛉 𝛉 = 𝑎, 𝑏 𝛏𝑖 = 𝑥𝑖 2 + 𝑦𝑖 2 , 1 𝐕0 𝛏𝑖 = 4𝑥𝑖 2 + 4𝑦𝑖 2 0 0 0 𝛉, 𝐕0 𝛉 = 4𝑎2 𝑥𝑖 2 + 𝑦𝑖 2 𝑑𝑖 2 = 𝑥𝑖 2 + 𝑦𝑖 2 − 𝑟 2 ~ 1 4 𝑥𝑖 2 + 𝑦𝑖 2 − 𝑟2 𝑥 𝑖 2 +𝑦𝑖 2 2
7.
Taubin法の解釈 7 min 𝛉 1 𝑁 𝛼=1 𝑁 𝛏 𝛼, 𝛉
2 𝛉, 𝐕0 𝛏 𝛼 𝛉 サンプソン誤差最小化: Taubin法: min 𝛉 1 𝑁 𝛼=1 𝑁 𝛏 𝛼, 𝛉 2 𝛉, ഥ𝐕0 𝛉 , ഥ𝐕0 = 1 𝑁 𝛼=1 𝑁 𝐕𝟎 𝛏 𝛼 𝐕0を平均で近似した
8.
Taubin法の解釈2 8 Taubin法: min 𝛉 1 𝑁 𝛼=1 𝑁 𝛉, 𝐌𝛉 2 𝛉,
ഥ𝐕0 𝛉 , 𝐌 = 1 𝑁 𝛼=1 𝑁 𝛏 𝛼 𝛏 𝛼 ⊤ , ഥ𝐕0 = 1 𝑁 𝛼=1 𝑁 𝐕𝟎 𝛏 𝛼 𝐌の真値 ഥ𝐌と観測される𝐌の期待値E 𝐌 の関係は E 𝐌 = ഥ𝐌 + 𝜎2 𝐍※ ※平均 𝜇 ,分散 𝜎 の確率変数 𝑋 について, E 𝑋2 = 𝜇 + 𝜎2になるのと同じ話 求めたいのはഥ𝐌𝛉 = 𝟎なので 𝐌 − 𝜎 𝟐 𝐍 𝛉 = 𝟎 → 𝐌𝛉 = 𝜎 𝟐 𝐍𝛉 𝜎 𝟐は小さいので𝐌𝛉 = 𝜆𝐍𝛉の最小固有値問題を解く. この ഥ𝐌とE 𝐌 のずれをどうにかするのがTaubin法
9.
重み反復法 9 min 𝛉 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝛏
𝛼, 𝛉 2 𝑠. 𝑡. 𝑤 𝛼 = 1 𝛉, 𝐕𝟎 𝛏 𝛼 𝛉 𝛉 𝑡 = min 𝛉 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝛏 𝛼, 𝛉 2 𝑠. 𝑡. 𝛉, 𝛉 = 1 サンプソン誤差最小化: 重み反復法: 𝑤 𝛼 𝑡 = 1 𝛉 𝑡 , 𝐕𝟎 𝛏 𝛼 𝛉 𝑡
10.
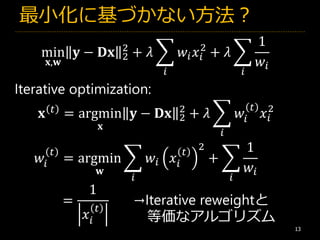
最小化に基づかない方法? 10 min 𝐱 𝐲 − 𝐃𝐱
2 2 + 𝜆 𝐱 1 例:スパースコーディング 𝐱 𝑡 = argmin 𝐱 𝐲 − 𝐃𝐱 2 2 + 𝜆 𝑖 𝑤𝑖 𝑡 𝑥𝑖 2 𝑤𝑖 𝑡 = 1 𝑥𝑖 𝑡 Iterative reweight method: これは等価?
11.
最小化に基づかない方法? 11 min 𝐱,𝐰 𝐲 − 𝐃𝐱
2 2 + 𝜆 𝑖 𝑤𝑖 𝑥𝑖 2 + 𝜆 𝑖 1 𝑤𝑖 𝐱 𝑡 = argmin 𝐱 𝐲 − 𝐃𝐱 2 2 + 𝜆 𝑖 𝑤𝑖 𝑡 𝑥𝑖 2 Iterative optimization:
12.
最小化に基づかない方法? 12 min 𝐱,𝐰 𝐲 − 𝐃𝐱
2 2 + 𝜆 𝑖 𝑤𝑖 𝑥𝑖 2 + 𝜆 𝑖 1 𝑤𝑖 𝐱 𝑡 = argmin 𝐱 𝐲 − 𝐃𝐱 2 2 + 𝜆 𝑖 𝑤𝑖 𝑡 𝑥𝑖 2 𝑤𝑖 𝑡 = argmin 𝐰 𝑖 𝑤𝑖 𝑥𝑖 𝑡 2 + 𝑖 1 𝑤𝑖 Iterative optimization: = 1 𝑥𝑖 𝑡
13.
最小化に基づかない方法? 13 min 𝐱,𝐰 𝐲 − 𝐃𝐱
2 2 + 𝜆 𝑖 𝑤𝑖 𝑥𝑖 2 + 𝜆 𝑖 1 𝑤𝑖 𝐱 𝑡 = argmin 𝐱 𝐲 − 𝐃𝐱 2 2 + 𝜆 𝑖 𝑤𝑖 𝑡 𝑥𝑖 2 𝑤𝑖 𝑡 = argmin 𝐰 𝑖 𝑤𝑖 𝑥𝑖 𝑡 2 + 𝑖 1 𝑤𝑖 Iterative optimization: = 1 𝑥𝑖 𝑡 →Iterative reweightと 等価なアルゴリズム
14.
最小化に基づかない方法? 14 min 𝐱,𝐰 𝐲 − 𝐃𝐱
2 2 + 𝜆 𝑖 𝑤𝑖 𝑥𝑖 2 + 𝜆 𝑖 1 𝑤𝑖 = min 𝐱 𝐲 − 𝐃𝐱 2 2 + 𝜆 𝑖 1 |𝑥𝑖| 𝑥𝑖 2 + 𝜆 𝑖 𝑥𝑖 = min 𝐱 𝐲 − 𝐃𝐱 2 2 + 2𝜆 𝑖 𝑥𝑖
15.
最小化に基づかない方法? 15 min 𝐱 𝐲 − 𝐃𝐱
2 2 + 𝜆 𝑖 𝑤𝑖 𝑥𝑖 2 𝑠. 𝑡. 𝑤𝑖 = 1 𝑥𝑖 𝐱 𝑡 = argmin 𝐱 𝐲 − 𝐃𝐱 2 2 + 𝜆 𝑖 𝑤𝑖 𝑡 𝑥𝑖 2 𝑤𝑖 𝑡 = 1 𝑥𝑖 𝑡 等価でない min 𝐱 𝐲 − 𝐃𝐱 2 2 + 2𝜆 𝑖 𝑥𝑖 min 𝐱 𝐲 − 𝐃𝐱 2 2 + 𝜆 𝑖 𝑥𝑖 ⇔ ⇔
16.
重み反復法 16 min 𝛉 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝛏
𝛼, 𝛉 2 𝑠. 𝑡. 𝑤 𝛼 = 1 𝛉, 𝐕𝟎 𝛏 𝛼 𝛉 𝛉 𝑡 = min 𝛉 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝛏 𝛼, 𝛉 2 𝑠. 𝑡. 𝛉, 𝛉 = 1 サンプソン誤差最小化: 重み反復法: 𝑤 𝛼 𝑡 = 1 𝛉 𝑡 , 𝐕𝟎 𝛏 𝛼 𝛉 𝑡
17.
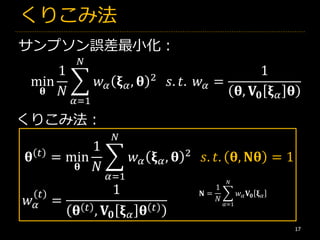
くりこみ法 17 サンプソン誤差最小化: くりこみ法: 𝑤 𝛼 𝑡 = 1 𝛉 𝑡
, 𝐕𝟎 𝛏 𝛼 𝛉 𝑡 𝐍 = 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝐕𝟎 𝛏 𝛼 min 𝛉 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝛏 𝛼, 𝛉 2 𝑠. 𝑡. 𝑤 𝛼 = 1 𝛉, 𝐕𝟎 𝛏 𝛼 𝛉 𝛉 𝑡 = min 𝛉 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝛏 𝛼, 𝛉 2 𝑠. 𝑡. 𝛉, 𝐍𝛉 = 1
18.
例:Line Fitting(重み反復法) 18 𝛉 =
𝑎, 𝑏, 𝑐 𝛏𝑖 = 𝑥𝑖, 𝑦𝑖, 1 𝐕0 = 1 0 0 0 1 0 0 0 0 𝛉, 𝐕0 𝛉 = 𝑎2 + 𝑏2 𝑤 𝛼 𝑡 = 1 𝛉 𝑡 ,𝐕 𝟎 𝛉 𝑡 は𝛼によらず 常に一定,最小二乗法と等価 𝛉 𝑡 = min 𝛉 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝛏 𝛼, 𝛉 2 𝑠. 𝑡. 𝛉, 𝛉 = 1 𝑤 𝛼 𝑡 = 1 𝛉 𝑡 , 𝐕𝟎 𝛏 𝛼 𝛉 𝑡
19.
例:Ellipse Fitting(重み反復法) 19 𝛉 =
𝑎, 𝑏, 𝑐 𝛏𝑖 = 𝑥𝑖 2 , 𝑥𝑖 𝑦𝑖, 𝑦𝑖 2 , 𝑥𝑖, 𝑦𝑖, 1 𝐕0[𝛏𝑖] = 𝑥𝑖 2 𝑥𝑖 𝑦𝑖 ⋯ 𝑥𝑖 𝑦𝑖 𝑥𝑖 2 + 𝑦𝑖 2 ⋯ ⋮ ⋮ ⋱ 𝑤 𝛼 𝑡 = 1 𝛉 𝑡 ,𝐕 𝟎 𝛉 𝑡 は𝛼に依存, 観測点ごとに異なる重み (ノイズの非一様性を考慮) 𝛉 𝑡 = min 𝛉 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝛏 𝛼, 𝛉 2 𝑠. 𝑡. 𝛉, 𝛉 = 1 𝑤 𝛼 𝑡 = 1 𝛉 𝑡 , 𝐕𝟎 𝛏 𝛼 𝛉 𝑡
20.
例:Ellipse Fitting(Taubin法) 20 𝛉 =
𝑎, 𝑏, 𝑐 𝛏𝑖 = 𝑥𝑖 2 , 𝑥𝑖 𝑦𝑖, 𝑦𝑖 2 , 𝑥𝑖, 𝑦𝑖, 1 𝐕0[𝛏𝑖] = 𝑥𝑖 2 𝑥𝑖 𝑦𝑖 ⋯ 𝑥𝑖 𝑦𝑖 𝑥𝑖 2 + 𝑦𝑖 2 ⋯ ⋮ ⋮ ⋱ 観測点ごとに一様な重み (ノイズは一様と仮定) 非線形変換データ𝛏の共分散 (ノイズの異方性を考慮) 𝐍 = 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝐕𝟎 𝛏 𝛼 𝛉 𝑡 = min 𝛉 1 𝑁 𝛼=1 𝑁 𝛏 𝛼, 𝛉 2 𝑠. 𝑡. 𝛉, 𝐍𝛉 = 1
21.
例:Ellipse Fitting(くりこみ法) 21 𝛉 =
𝑎, 𝑏, 𝑐 𝛏𝑖 = 𝑥𝑖 2 , 𝑥𝑖 𝑦𝑖, 𝑦𝑖 2 , 𝑥𝑖, 𝑦𝑖, 1 𝐕0[𝛏𝑖] = 𝑥𝑖 2 𝑥𝑖 𝑦𝑖 ⋯ 𝑥𝑖 𝑦𝑖 𝑥𝑖 2 + 𝑦𝑖 2 ⋯ ⋮ ⋮ ⋱ 観測点ごとに異なる重み (ノイズの非一様性) Taubin法的な制約 (ノイズの異方性) 𝑤 𝛼 𝑡 = 1 𝛉 𝑡 , 𝐕𝟎 𝛏 𝛼 𝛉 𝑡 𝐍 = 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝐕𝟎 𝛏 𝛼 𝛉 𝑡 = min 𝛉 1 𝑁 𝛼=1 𝑁 𝑤 𝛼 𝛏 𝛼, 𝛉 2 𝑠. 𝑡. 𝛉, 𝐍𝛉 = 1
22.
まとめ 22 -実験ではFNS法が不安定というが,同じサンプソン -誤差を最小化するHEIV法は安定して収束する? 個人的な感想:サンプソン誤差最小化でいいのでは? -目的関数があるという安心感 Taubin法:ノイズの異方性に対処 重み反復法:ノイズの非一様性に対処 くりこみ法:上二つの組み合わせ 最小二乗法:ノイズの影響は一様かつ等方と仮定
Download



![幾何学的推定
6
Circle Fitting:
=
𝑎 𝑥 𝑖
2
+𝑦𝑖
2
+𝑏
2
4𝑎2 𝑥 𝑖
2+𝑦𝑖
2 :サンプソン距離
min
𝑎,𝑏
𝑖
𝑎 𝑥𝑖
2
+ 𝑦𝑖
2
+ 𝑏
2
4𝑎2 𝑥𝑖
2
+ 𝑦𝑖
2
= min
𝛉
𝑖
𝛏𝑖, 𝛉 2
𝛉, 𝐕0[𝛏𝑖]𝛉
𝛉 = 𝑎, 𝑏
𝛏𝑖 = 𝑥𝑖
2
+ 𝑦𝑖
2
, 1
𝐕0 𝛏𝑖 = 4𝑥𝑖
2
+ 4𝑦𝑖
2
0
0 0
𝛉, 𝐕0 𝛉 = 4𝑎2 𝑥𝑖
2
+ 𝑦𝑖
2
𝑑𝑖
2
= 𝑥𝑖
2
+ 𝑦𝑖
2
− 𝑟
2
~
1
4
𝑥𝑖
2
+ 𝑦𝑖
2
−
𝑟2
𝑥 𝑖
2
+𝑦𝑖
2
2](https://image.slidesharecdn.com/cvsaisentan-170408020027/85/6-2-4-4-2-6-320.jpg)










![例:Ellipse Fitting(重み反復法)
19
𝛉 = 𝑎, 𝑏, 𝑐
𝛏𝑖 = 𝑥𝑖
2
, 𝑥𝑖 𝑦𝑖, 𝑦𝑖
2
, 𝑥𝑖, 𝑦𝑖, 1
𝐕0[𝛏𝑖] =
𝑥𝑖
2
𝑥𝑖 𝑦𝑖 ⋯
𝑥𝑖 𝑦𝑖 𝑥𝑖
2
+ 𝑦𝑖
2
⋯
⋮ ⋮ ⋱
𝑤 𝛼
𝑡
=
1
𝛉 𝑡 ,𝐕 𝟎 𝛉 𝑡 は𝛼に依存,
観測点ごとに異なる重み
(ノイズの非一様性を考慮)
𝛉 𝑡
= min
𝛉
1
𝑁
𝛼=1
𝑁
𝑤 𝛼 𝛏 𝛼, 𝛉 2
𝑠. 𝑡. 𝛉, 𝛉 = 1
𝑤 𝛼
𝑡
=
1
𝛉 𝑡 , 𝐕𝟎 𝛏 𝛼 𝛉 𝑡](https://image.slidesharecdn.com/cvsaisentan-170408020027/85/6-2-4-4-2-19-320.jpg)
![例:Ellipse Fitting(Taubin法)
20
𝛉 = 𝑎, 𝑏, 𝑐
𝛏𝑖 = 𝑥𝑖
2
, 𝑥𝑖 𝑦𝑖, 𝑦𝑖
2
, 𝑥𝑖, 𝑦𝑖, 1
𝐕0[𝛏𝑖] =
𝑥𝑖
2
𝑥𝑖 𝑦𝑖 ⋯
𝑥𝑖 𝑦𝑖 𝑥𝑖
2
+ 𝑦𝑖
2
⋯
⋮ ⋮ ⋱
観測点ごとに一様な重み
(ノイズは一様と仮定)
非線形変換データ𝛏の共分散
(ノイズの異方性を考慮)
𝐍 =
1
𝑁
𝛼=1
𝑁
𝑤 𝛼 𝐕𝟎 𝛏 𝛼
𝛉 𝑡
= min
𝛉
1
𝑁
𝛼=1
𝑁
𝛏 𝛼, 𝛉 2
𝑠. 𝑡. 𝛉, 𝐍𝛉 = 1](https://image.slidesharecdn.com/cvsaisentan-170408020027/85/6-2-4-4-2-20-320.jpg)
![例:Ellipse Fitting(くりこみ法)
21
𝛉 = 𝑎, 𝑏, 𝑐
𝛏𝑖 = 𝑥𝑖
2
, 𝑥𝑖 𝑦𝑖, 𝑦𝑖
2
, 𝑥𝑖, 𝑦𝑖, 1
𝐕0[𝛏𝑖] =
𝑥𝑖
2
𝑥𝑖 𝑦𝑖 ⋯
𝑥𝑖 𝑦𝑖 𝑥𝑖
2
+ 𝑦𝑖
2
⋯
⋮ ⋮ ⋱
観測点ごとに異なる重み
(ノイズの非一様性)
Taubin法的な制約
(ノイズの異方性)
𝑤 𝛼
𝑡
=
1
𝛉 𝑡 , 𝐕𝟎 𝛏 𝛼 𝛉 𝑡
𝐍 =
1
𝑁
𝛼=1
𝑁
𝑤 𝛼 𝐕𝟎 𝛏 𝛼
𝛉 𝑡
= min
𝛉
1
𝑁
𝛼=1
𝑁
𝑤 𝛼 𝛏 𝛼, 𝛉 2
𝑠. 𝑡. 𝛉, 𝐍𝛉 = 1](https://image.slidesharecdn.com/cvsaisentan-170408020027/85/6-2-4-4-2-21-320.jpg)


















![[DL輪読会]Deep Learning 第2章 線形代数](https://cdn.slidesharecdn.com/ss_thumbnails/deeplearningchapter2-180601014406-thumbnail.jpg?width=640&height=640&fit=bounds)





























