Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
恵水
Uploaded by
恵太 水野
PDF, PPTX
51 views
Study session#3
for a study session in my company
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 13
2
/ 13
3
/ 13
4
/ 13
5
/ 13
6
/ 13
7
/ 13
8
/ 13
9
/ 13
10
/ 13
11
/ 13
12
/ 13
13
/ 13
More Related Content
KEY
prml4.1.3-4.1.4
by
Ryo Yamashita
PDF
パターン認識と機械学習 §6.2 カーネル関数の構成
by
Prunus 1350
PDF
Prml 4.1.1
by
Satoshi Kawamoto
PDF
統計概論 isseing333
by
Issei Kurahashi
PPT
030 2変数の集計
by
t2tarumi
PDF
Kim120 lt 12_6
by
amusementcreators
PPTX
TopCoder SRM614 解説
by
EmKjp
PDF
Permutation
by
oupc
prml4.1.3-4.1.4
by
Ryo Yamashita
パターン認識と機械学習 §6.2 カーネル関数の構成
by
Prunus 1350
Prml 4.1.1
by
Satoshi Kawamoto
統計概論 isseing333
by
Issei Kurahashi
030 2変数の集計
by
t2tarumi
Kim120 lt 12_6
by
amusementcreators
TopCoder SRM614 解説
by
EmKjp
Permutation
by
oupc
What's hot
PDF
線形計画法入門
by
Shunji Umetani
PDF
20170327_レムニスケートにまつわる色々な計算
by
matsumoring
PDF
はじめてのパターン認識8章 サポートベクトルマシン
by
NobuyukiTakayasu
PDF
最急降下法
by
Akira Miyazawa
PDF
20150922_楕円関数とおもしろい応用
by
matsumoring
PDF
漸化式と微分積分
by
政孝 鍋島
PDF
はじめてのパターン認識 第6章 後半
by
Prunus 1350
PPTX
漸化式と微分積分
by
nabeshimamasataka
PDF
スペクトラル・クラスタリング
by
Akira Miyazawa
PPT
Master Thesis
by
Toshiyuki Shimono
PDF
ユークリッド空間上の変な位相
by
政孝 鍋島
PDF
ダイクストラ法
by
ohsofty
PPTX
R上の変な位相
by
nabeshimamasataka
PPTX
奇関数・偶関数
by
yu_nahb219
PDF
RUPC2017:M問題
by
Takumi Yamashita
PDF
C04
by
anonymousouj
線形計画法入門
by
Shunji Umetani
20170327_レムニスケートにまつわる色々な計算
by
matsumoring
はじめてのパターン認識8章 サポートベクトルマシン
by
NobuyukiTakayasu
最急降下法
by
Akira Miyazawa
20150922_楕円関数とおもしろい応用
by
matsumoring
漸化式と微分積分
by
政孝 鍋島
はじめてのパターン認識 第6章 後半
by
Prunus 1350
漸化式と微分積分
by
nabeshimamasataka
スペクトラル・クラスタリング
by
Akira Miyazawa
Master Thesis
by
Toshiyuki Shimono
ユークリッド空間上の変な位相
by
政孝 鍋島
ダイクストラ法
by
ohsofty
R上の変な位相
by
nabeshimamasataka
奇関数・偶関数
by
yu_nahb219
RUPC2017:M問題
by
Takumi Yamashita
C04
by
anonymousouj
Study session#3
1.
機械学習の理論 (回帰) part2 2018年11月
2.
微分で誤差を小さくしよう! ところで微分とは? 一言で言うと「瞬間の変化量」 dx f(x) = x
を微分するとn d f(x) = nx n-1
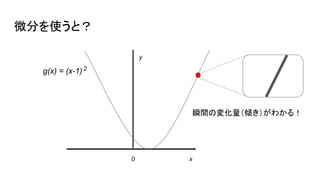
3.
微分を使うと? y x0 2 瞬間の変化量(傾き)がわかる! g(x) = (x-1)
4.
傾きがわかると? y x0 2 スライドできる! (y=0に近づくことができる) g(x) = (x-1)
5.
勾配降下法(名前はどうでもいい) y x0 g(x) = (x-1)2 学習率と呼ばれる正の定数 (イータ) 左の矢印の長さを決めるもの
6.
ex) y x 0 10 g(x) =
(x-1) 2 = 10 = 2x-2 = 0.5 10 - 0.1 * (2*10 - 2) ? ?
7.
ex) y x 0 10 g(x) =
(x-1) 2 = 10 = 2x-2 = 0.5 10 - 0.1 * (2*10 - 2) 8.8 8.8
8.
ここで思い出してほしい。目的関数! 誤差の総和
9.
そういえば目的関数も二次関数! y x0 誤差。 微分を使って 誤差を0に近づける!
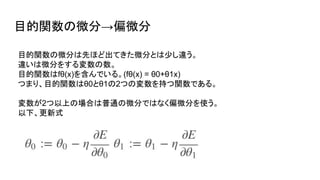
10.
目的関数の微分→偏微分 目的関数の微分は先ほど出てきた微分とは少し違う。 違いは微分をする変数の数。 目的関数はfθ(x)を含んでいる。(fθ(x) = θ0+θ1x) つまり、目的関数はθ0とθ1の2つの変数を持つ関数である。 変数が2つ以上の場合は普通の微分ではなく偏微分を使う。 以下、更新式
11.
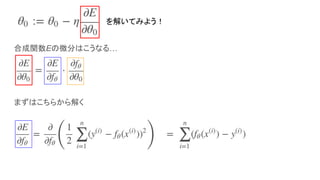
合成関数Eの微分はこうなる… まずはこちらから解く を解いてみよう!
12.
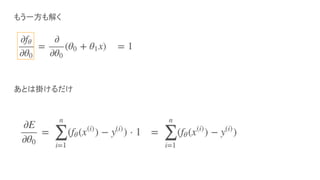
もう一方も解く あとは掛けるだけ
13.
こちらも同じように微分すると… 最終的にパラメータ更新式はこうなる…
Download