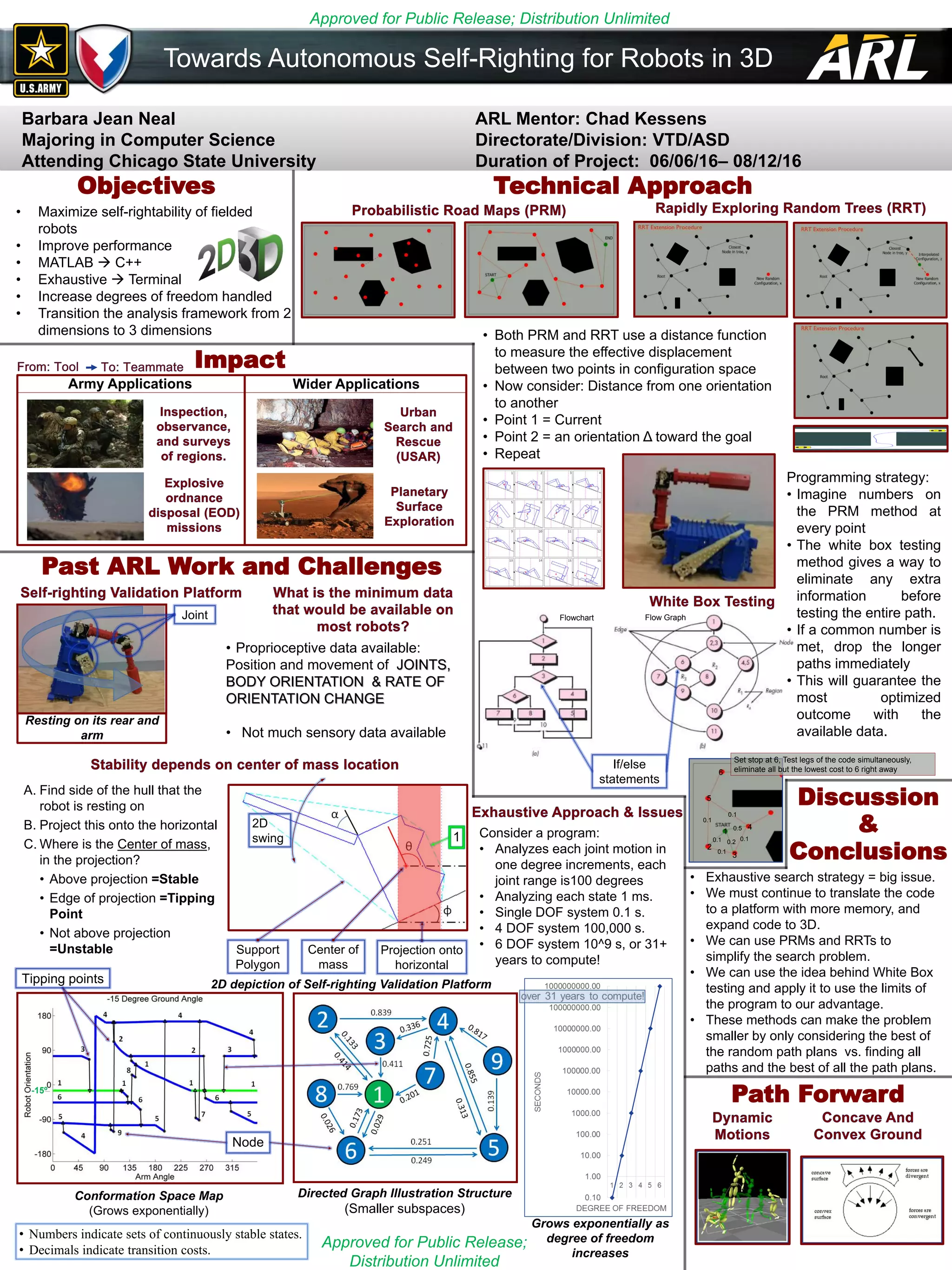
This document discusses research towards developing algorithms to enable robots to autonomously right themselves. It notes that proprioceptive joint and body orientation data is available but sensory data is limited. It aims to maximize robot self-righting abilities, improve performance, and transition analysis from 2D to 3D. Exhaustive search strategies are infeasible due to computational complexity. The document proposes using probabilistic roadmap and rapidly exploring random tree algorithms to simplify the search problem. It also suggests applying white box testing concepts to leverage program limits to identify optimal path plans more efficiently than exhaustive searches.

























![[1312.5602] Playing Atari with Deep Reinforcement Learning](https://cdn.slidesharecdn.com/ss_thumbnails/playingatariwithdeepreinforcementlearning-180814064557-thumbnail.jpg?width=640&height=640&fit=bounds)