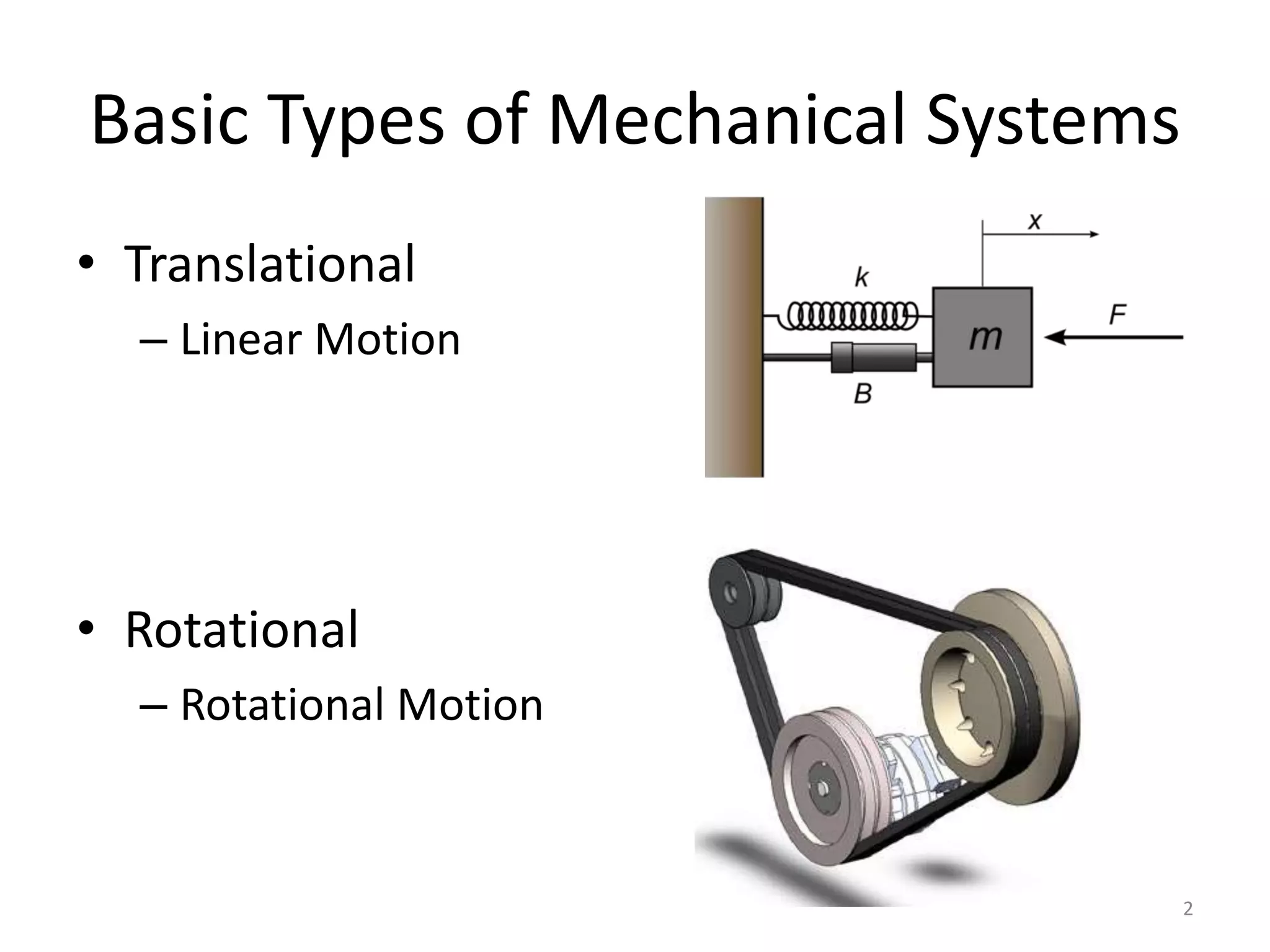
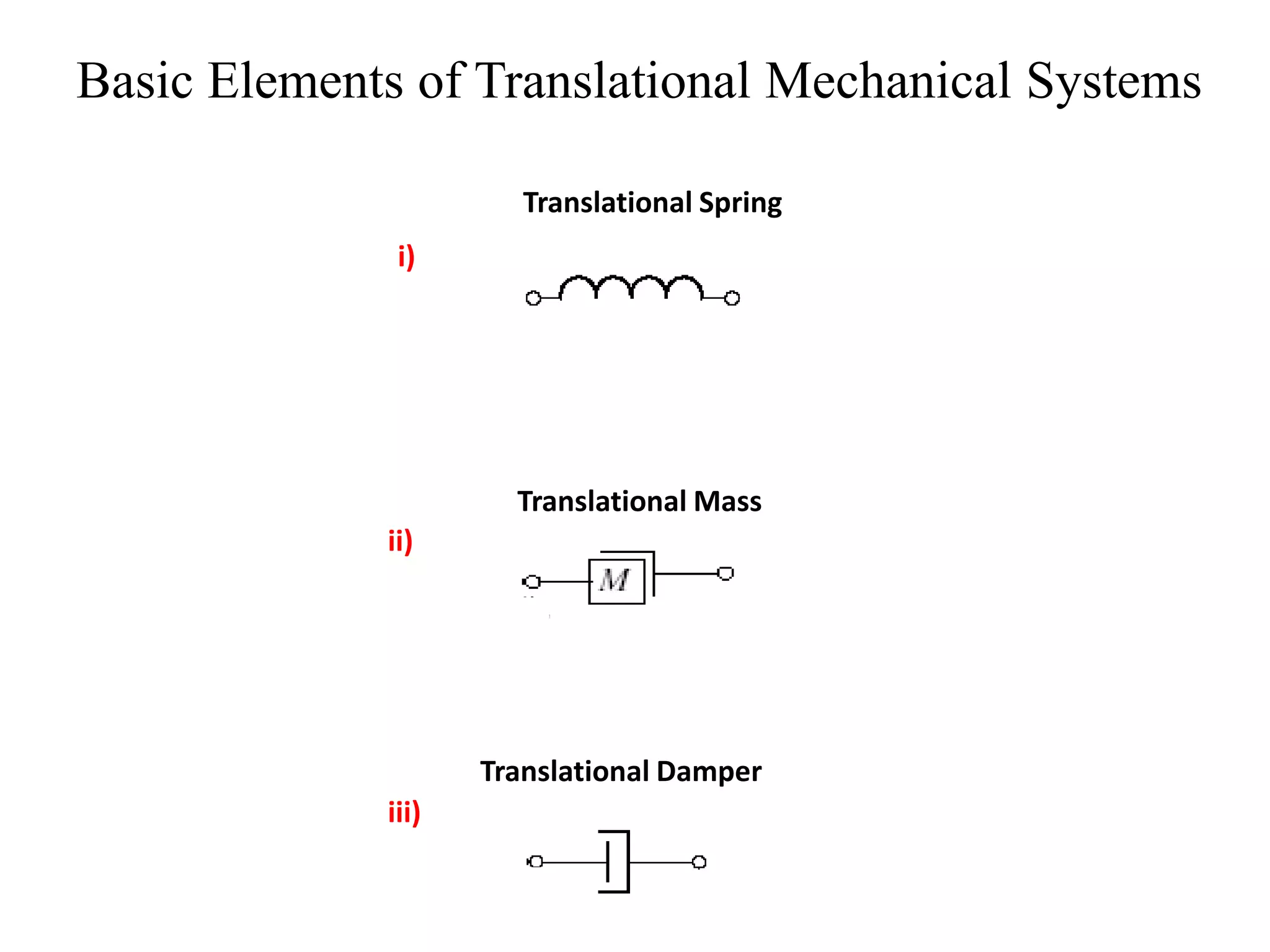
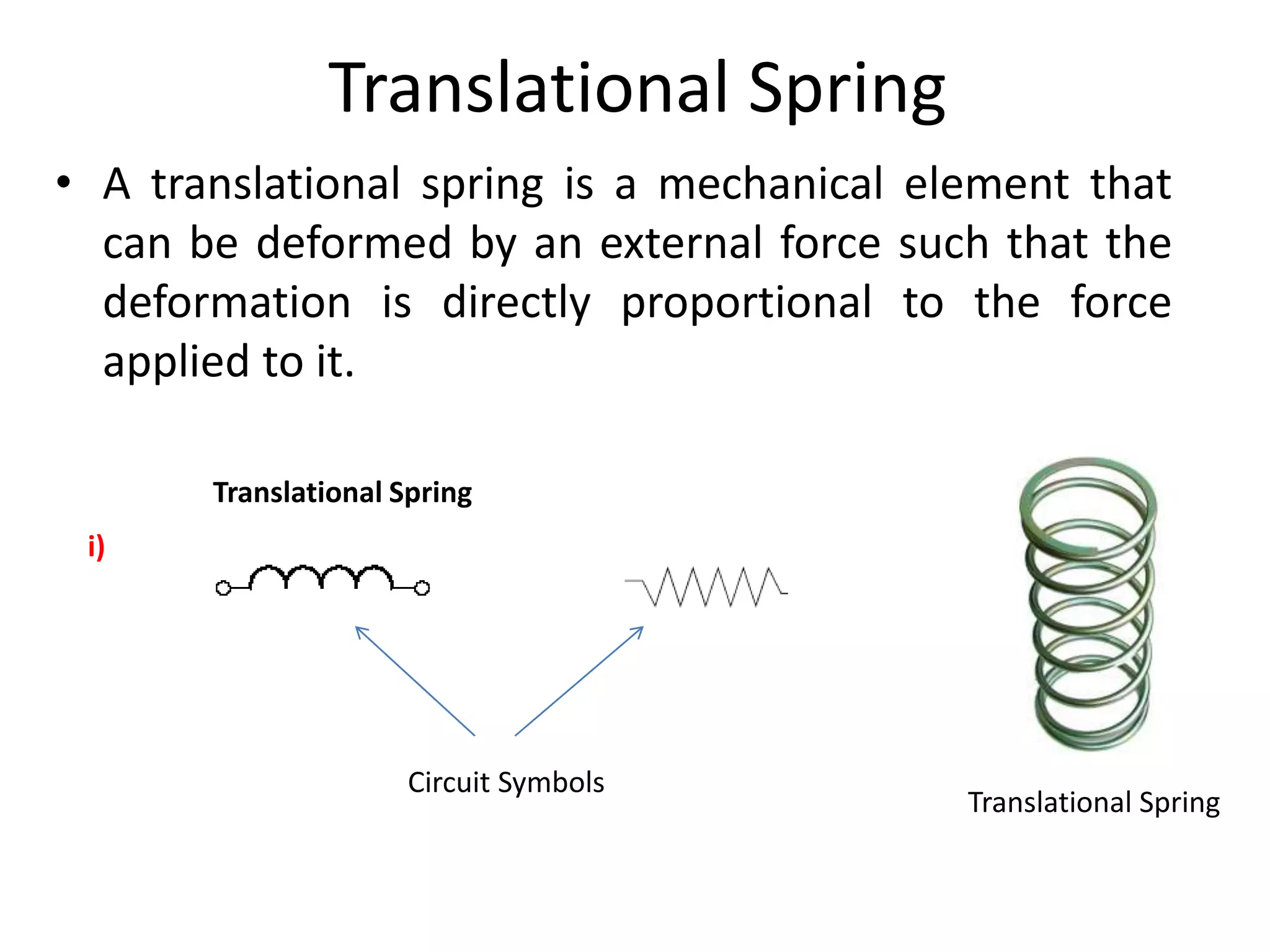
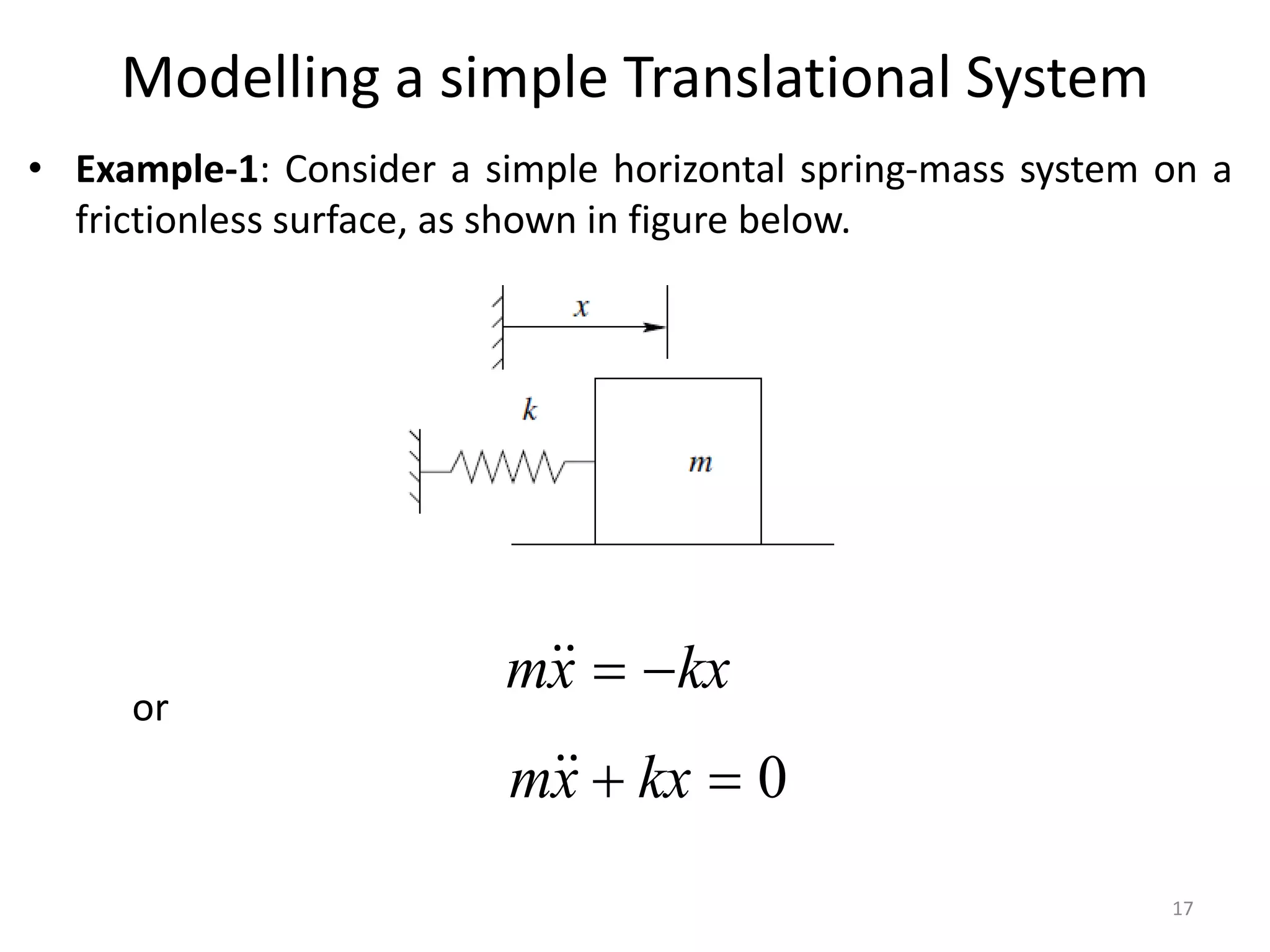
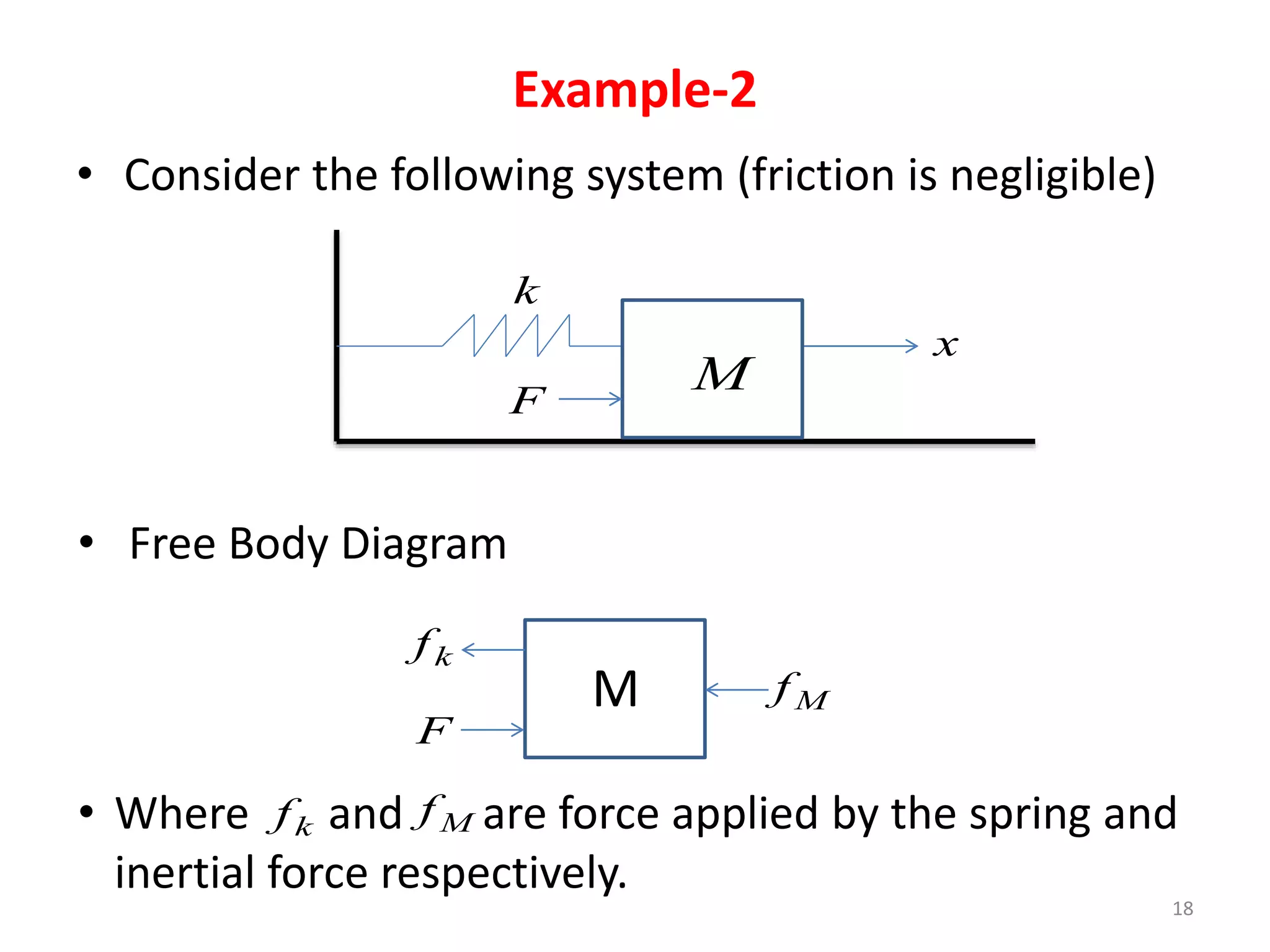
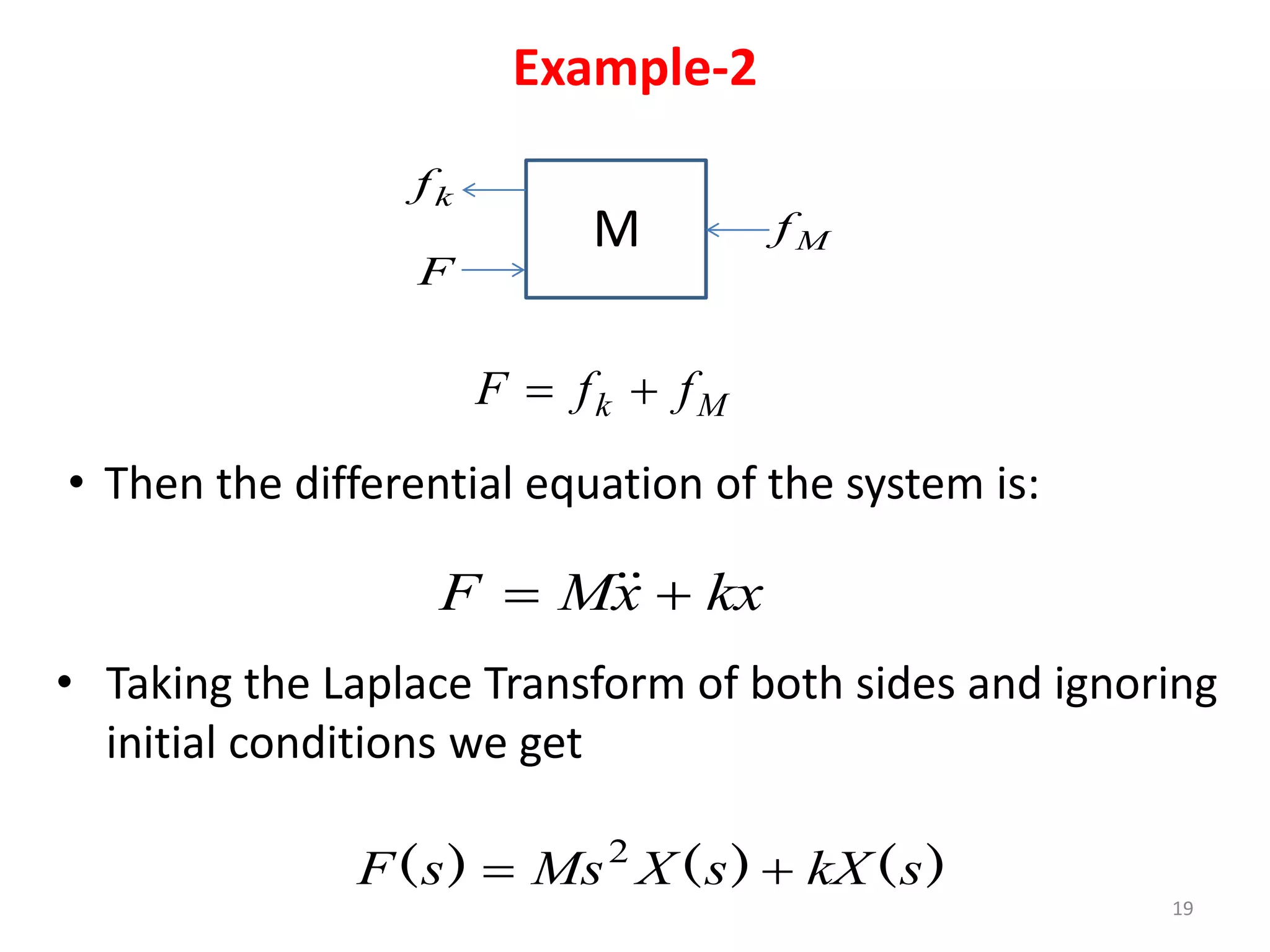
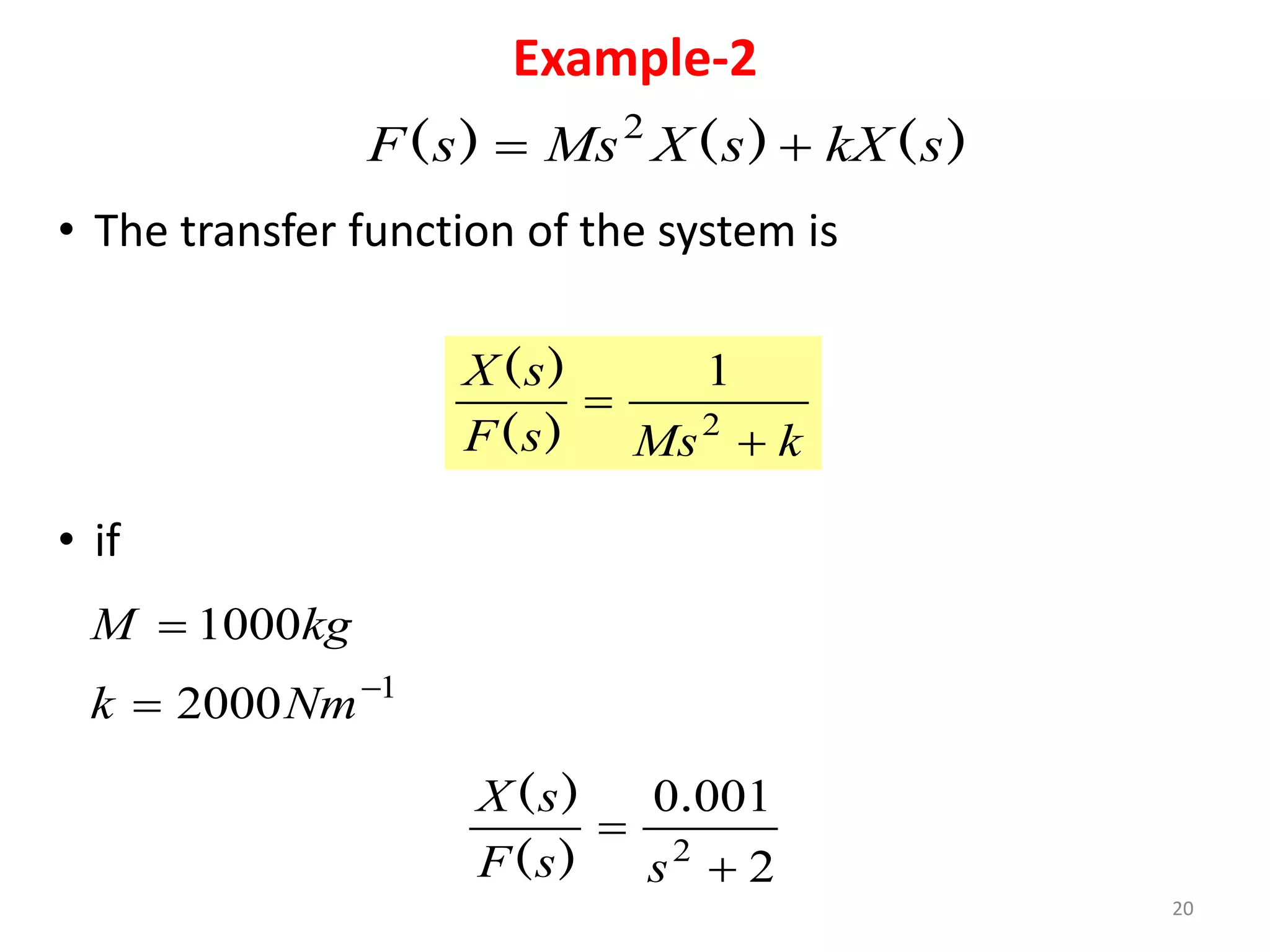
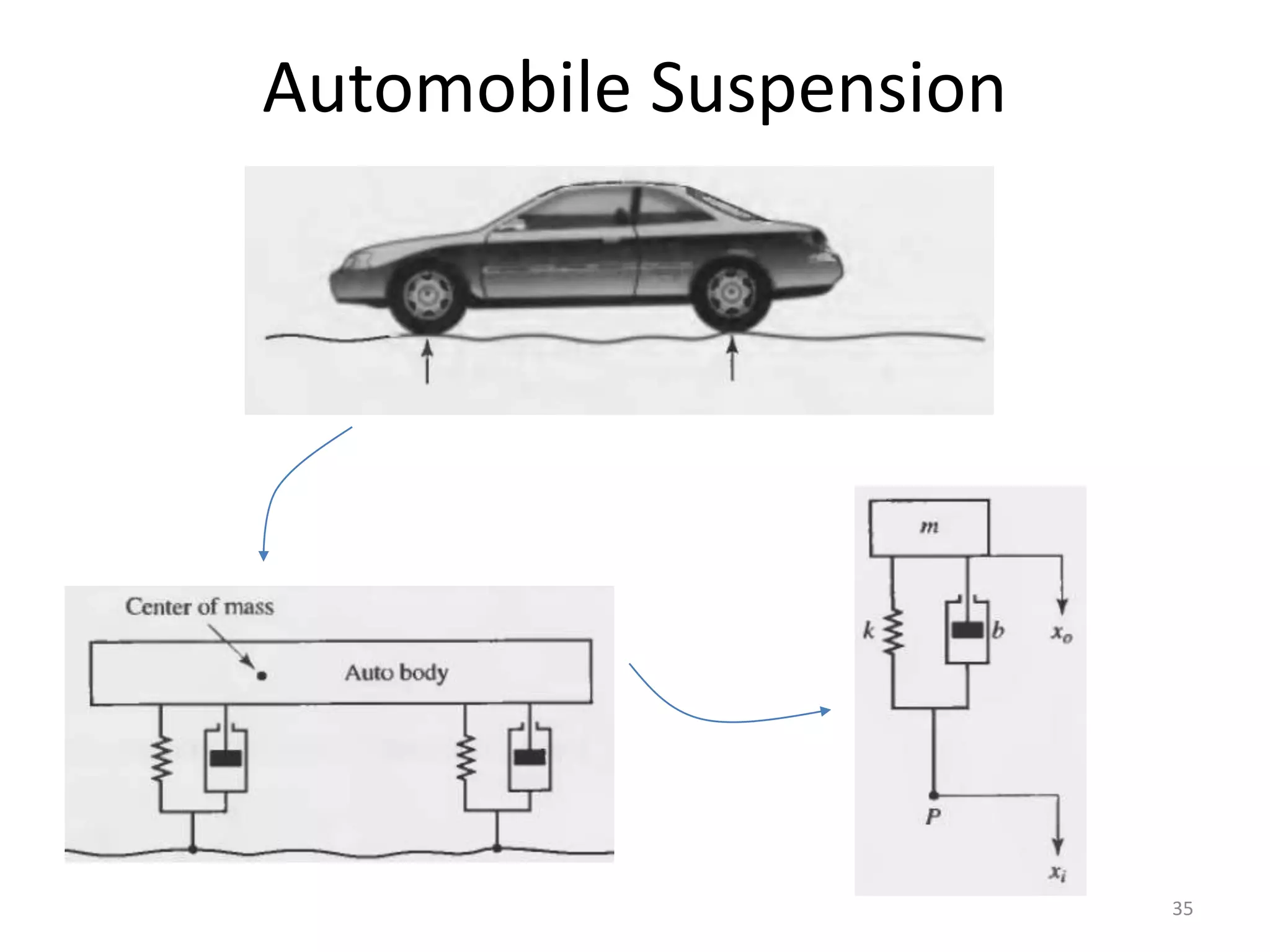
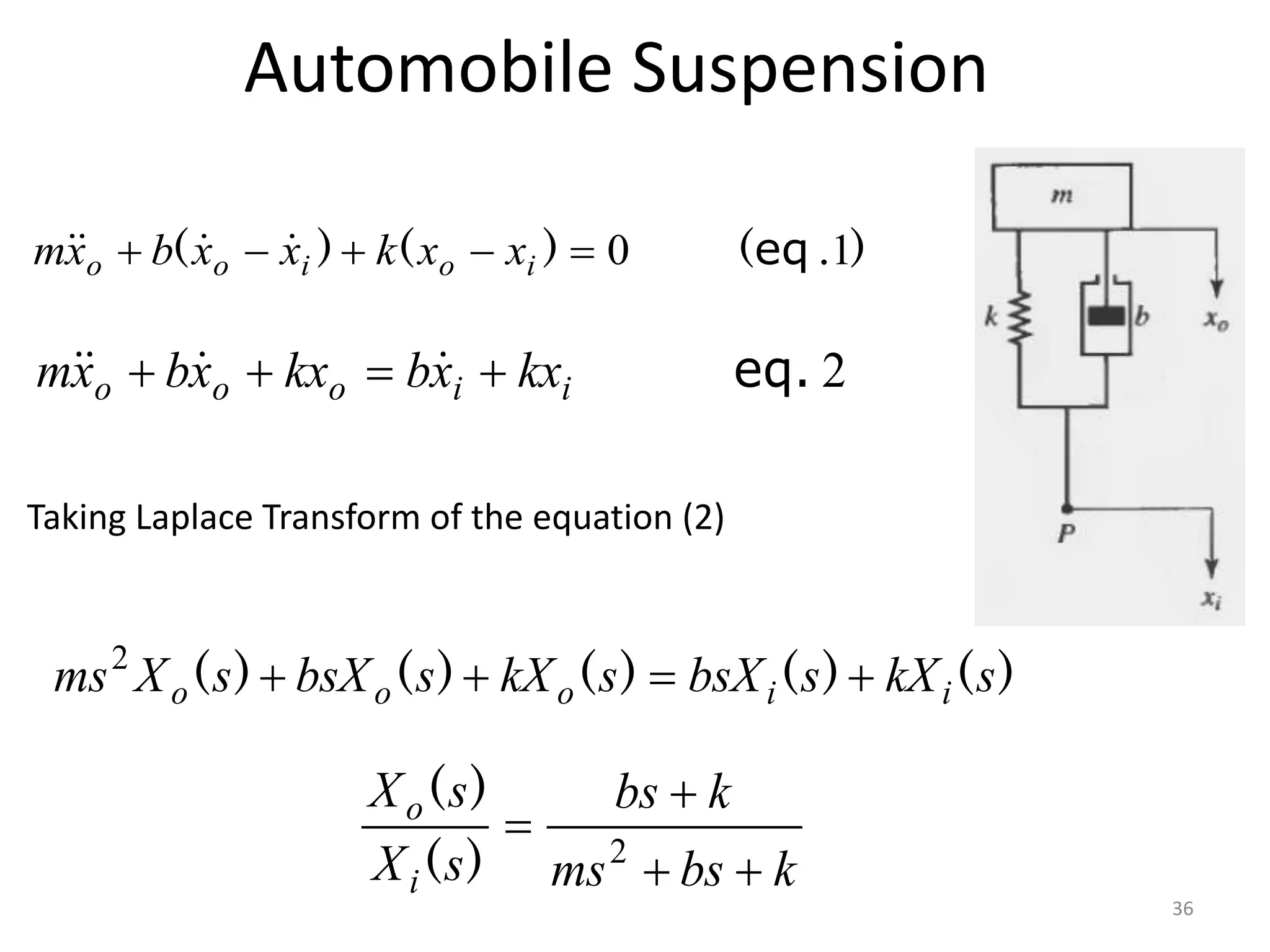
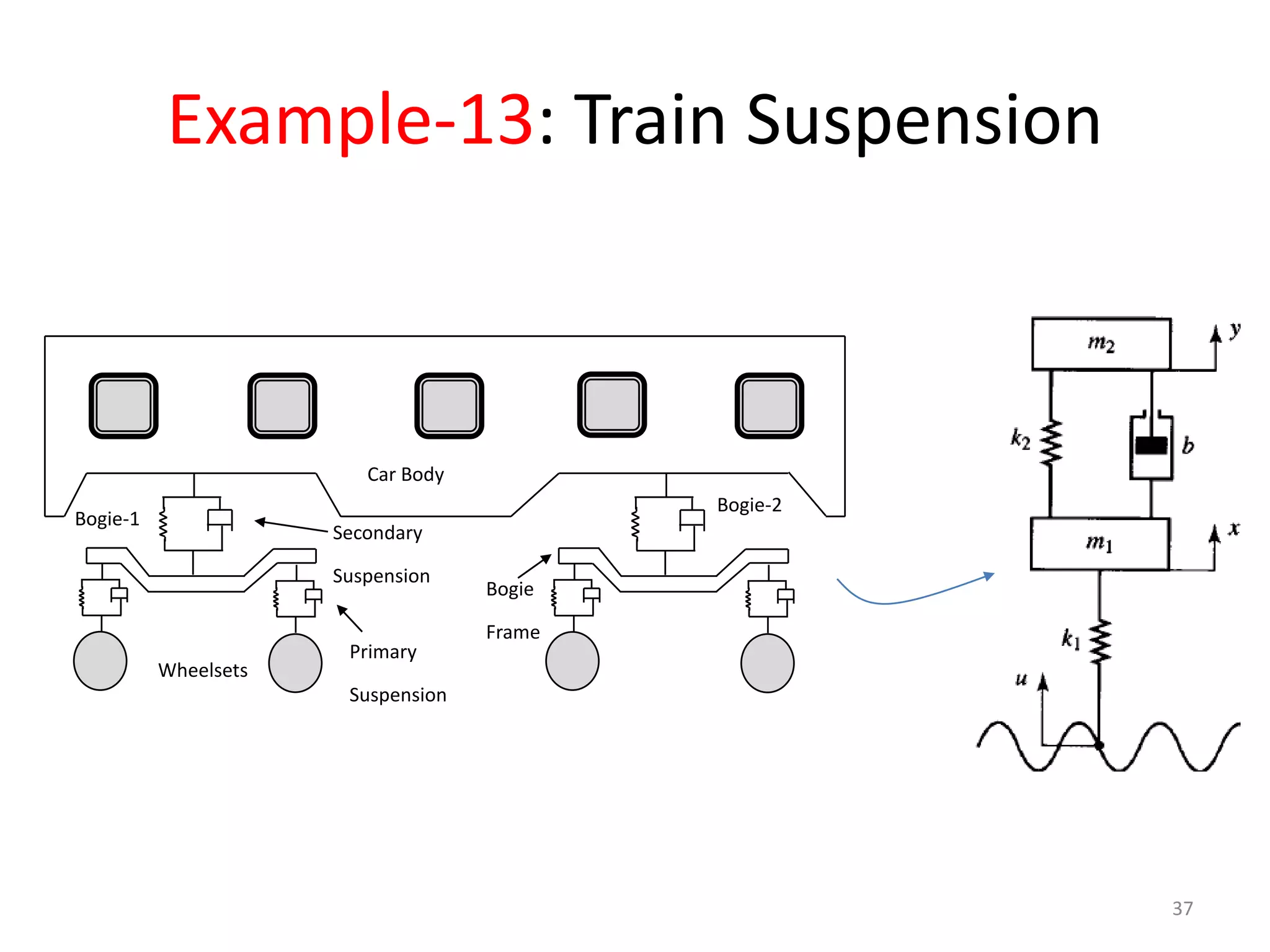
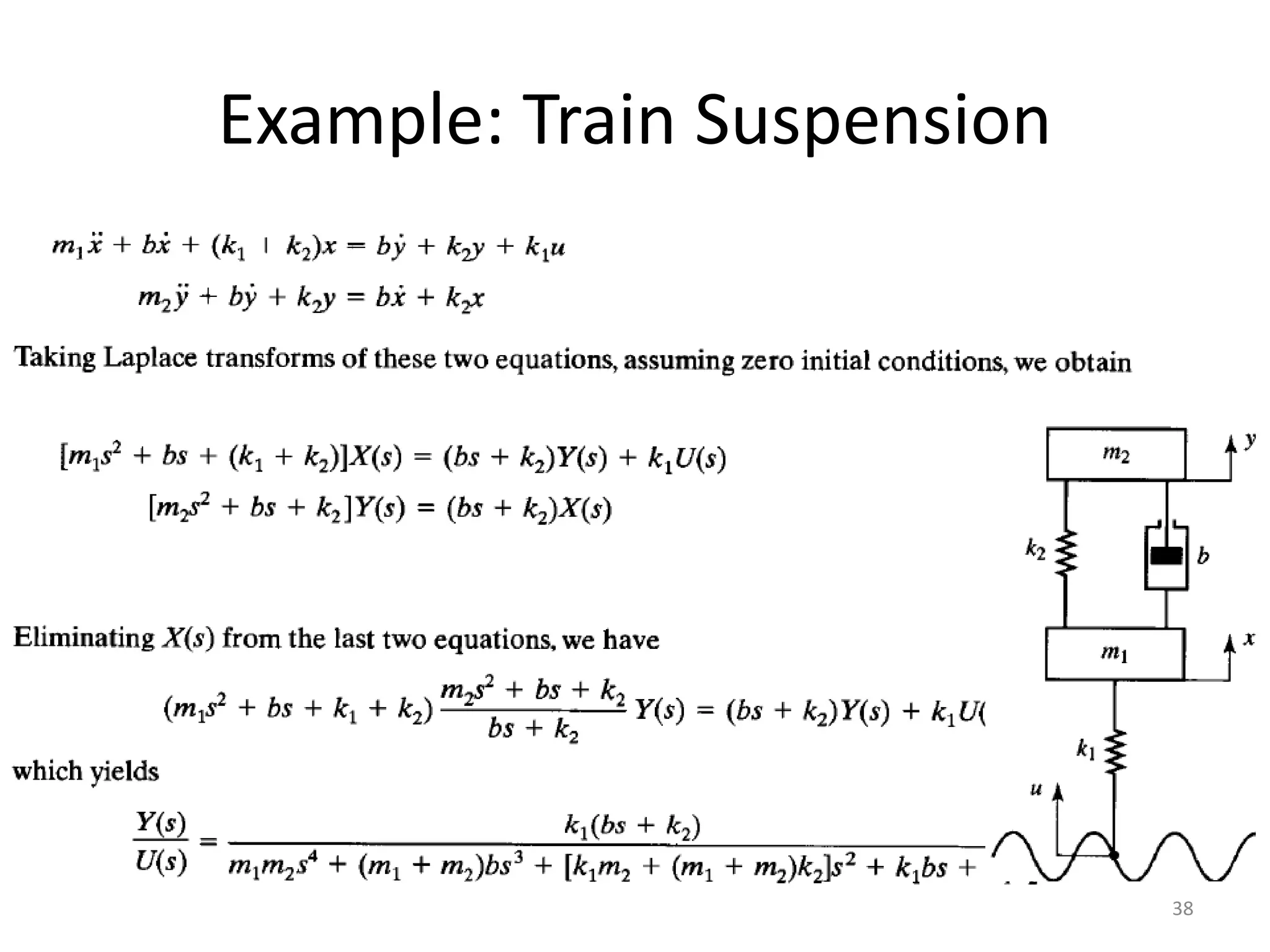
This document provides an outline and overview of translational mechanical systems. It begins by defining translational and rotational mechanical systems. For translational systems, it describes the basic elements of springs, masses, and dampers. It provides examples of modeling simple spring-mass systems and damped systems using differential equations. Applications discussed include automobile and train suspensions. The document aims to introduce the basic concepts and modeling of translational mechanical systems.