Downloaded 74 times
![IE243 ELECTRICAL MACHINES–I
[Cr. Hrs = 2+1] [Marks: 100+50]
By
Asif Ahmed Memon](https://image.slidesharecdn.com/lecture6-150107093429-conversion-gate02/85/machine-Lecture-6-1-320.jpg)





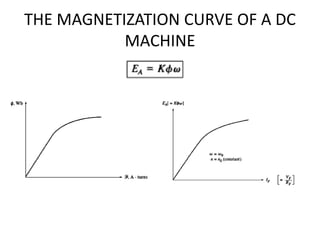

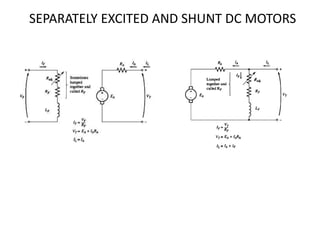

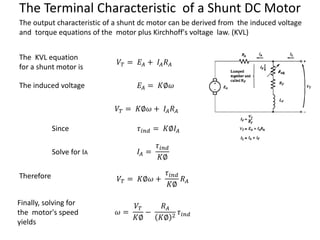


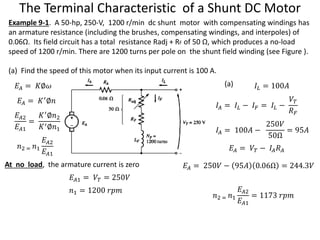
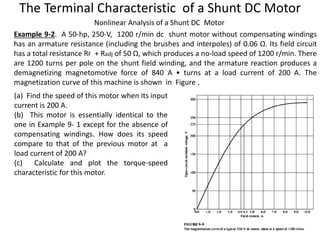
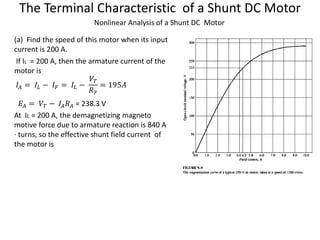






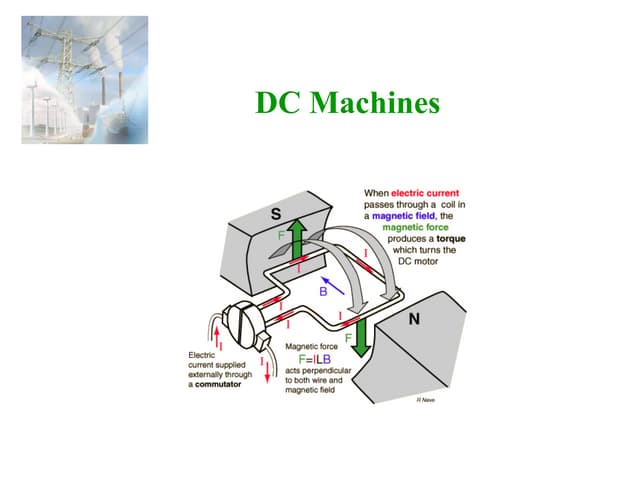
This document discusses direct current (DC) electrical machines. It covers the equivalent circuit of a DC motor, the magnetization curve of a DC machine, and different types of DC motors including separately excited, shunt, permanent magnet, series, and compounded DC motors. The key characteristics and behaviors of shunt DC motors are analyzed through examples, including the effect of armature reaction and derivation of the torque-speed curve. Nonlinear analysis is also demonstrated for a shunt motor without compensating windings.





























![Chapter 4 dc machine [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/chapter4-dcmachineautosaved-140915220206-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




















































