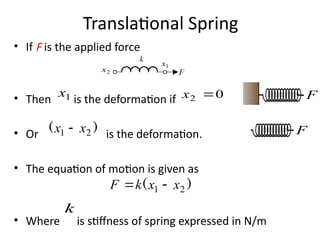
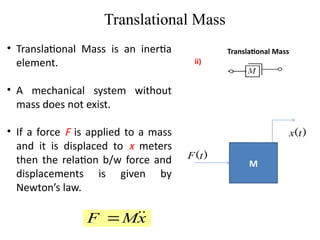
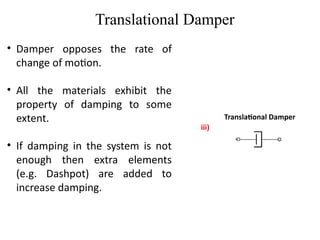
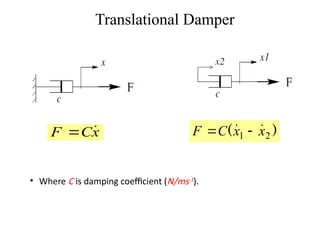
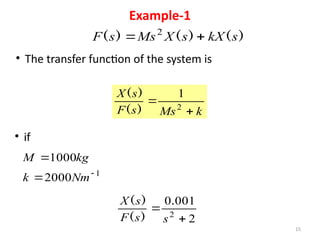
The document discusses mathematical modeling in control system engineering, emphasizing the importance of models for simulation, prediction, and control system design. It differentiates between grey box and white box models based on the knowledge of internal dynamics and highlights basic types of mechanical systems, including translational components such as springs, masses, and dampers. Key equations related to these components are provided, illustrating their behavior under applied forces.


![4
Grey Box Model
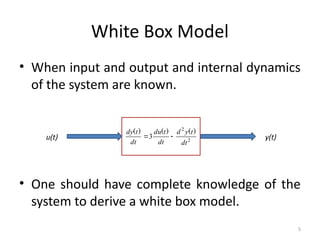
• When input and output and some information
about the internal dynamics of the system are
known.
• Easier than white box Modelling.
u(t) y(t)
y[u(t), t]](https://image.slidesharecdn.com/13087011100162141004-241217120239-799b3351/85/Mathematical-MODELLING-OF-CONTROL-SYSTEM-4-320.jpg)