Download to read offline
![In order to minimize the difference
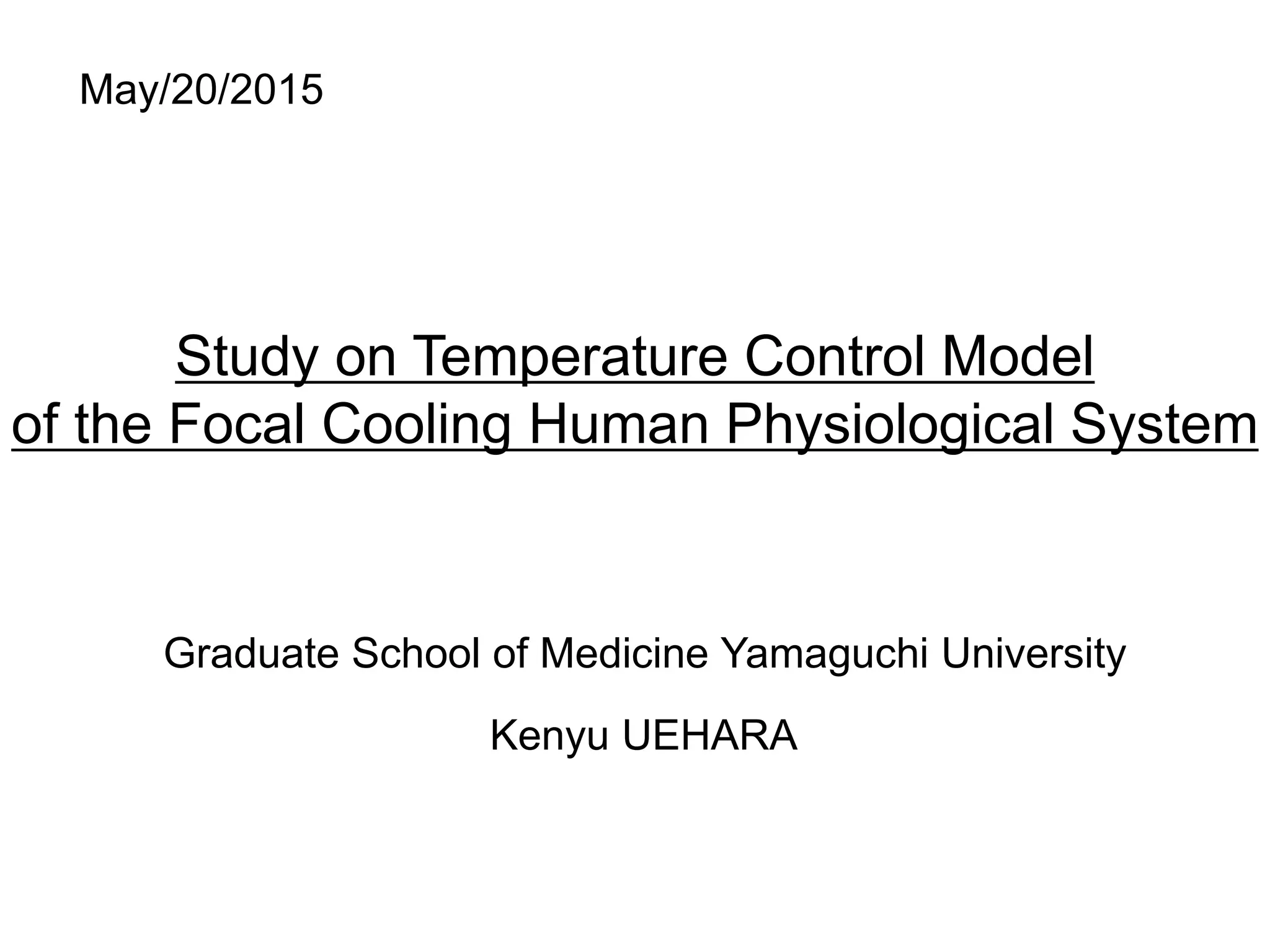
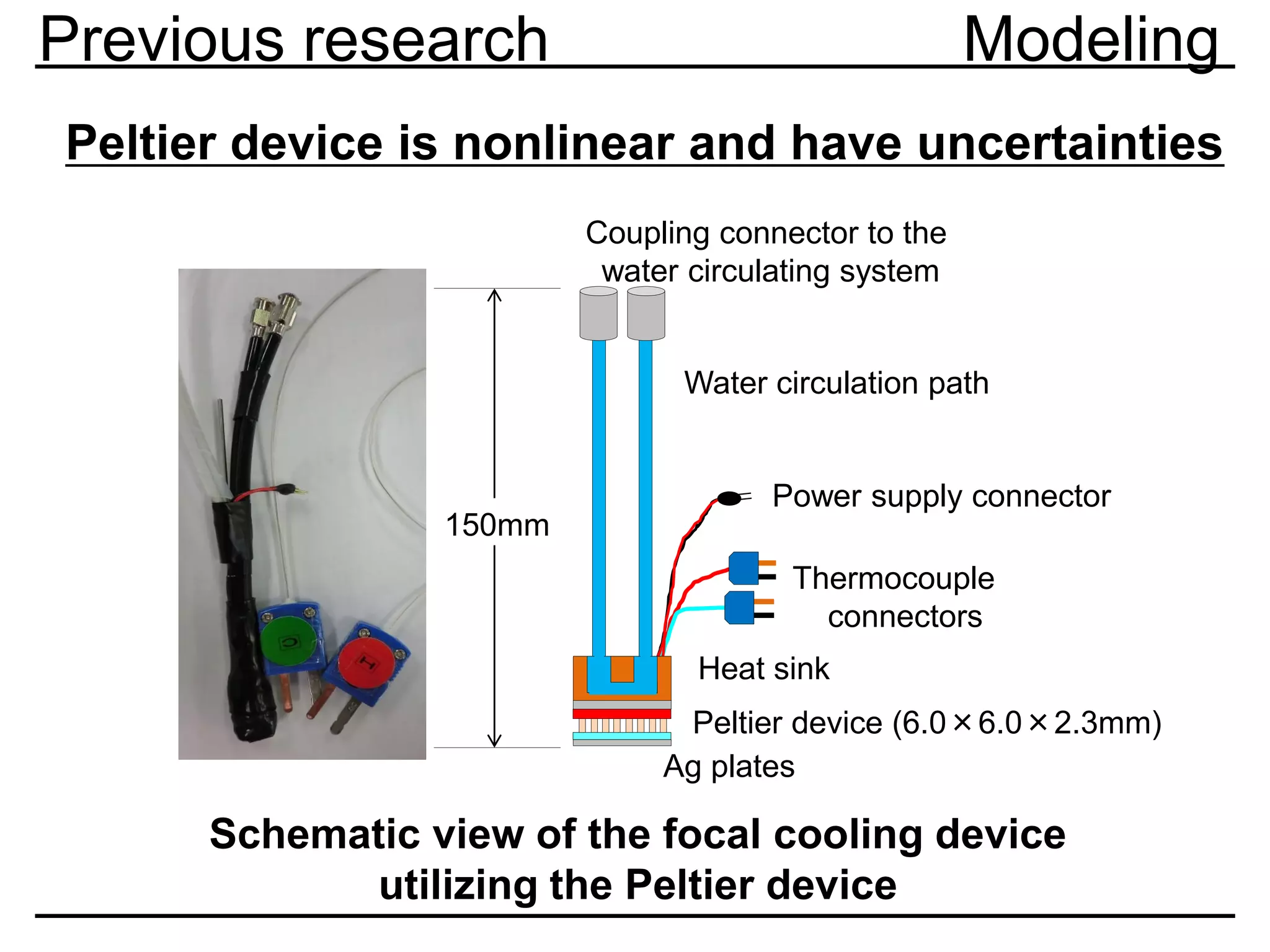
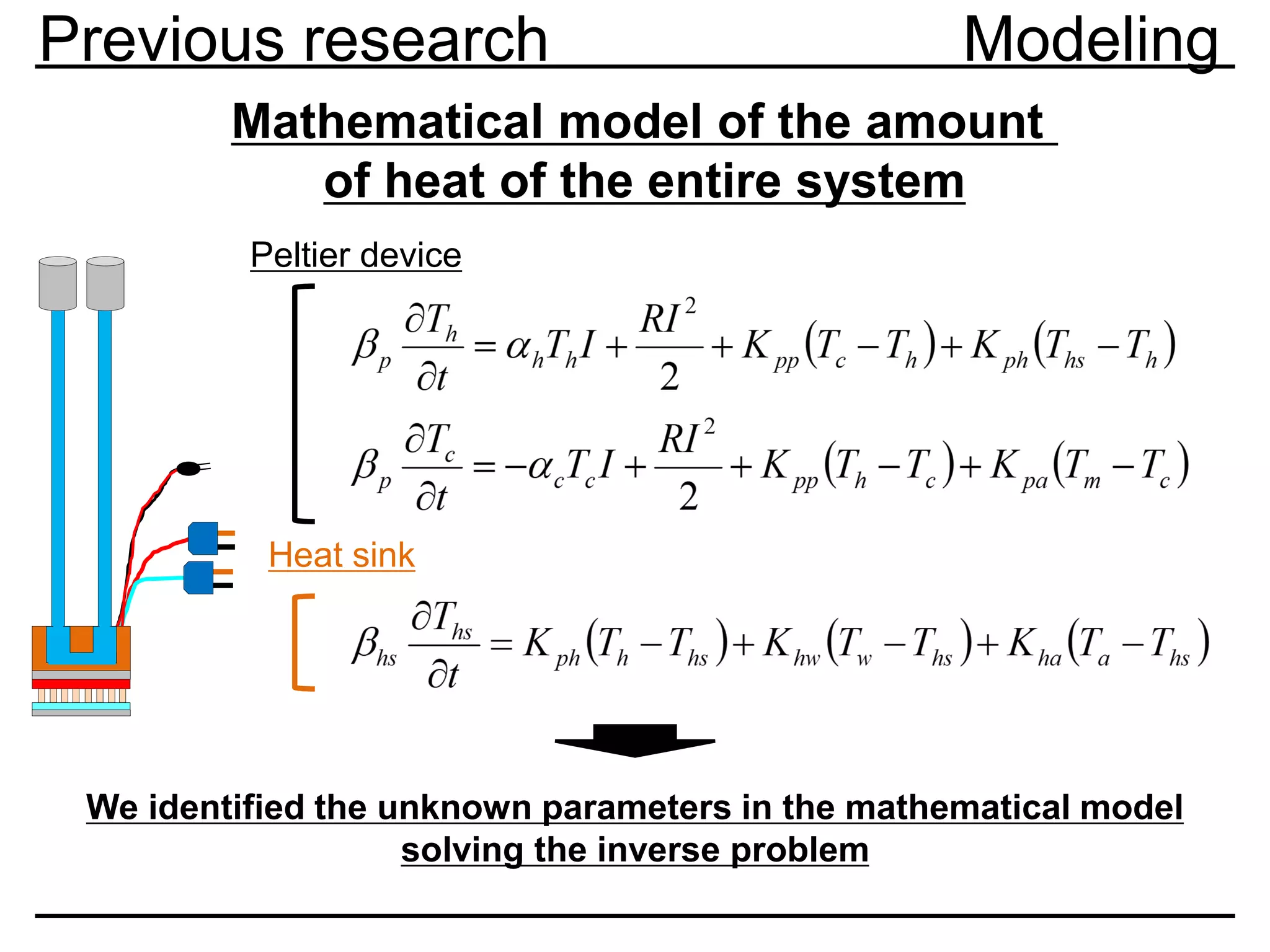
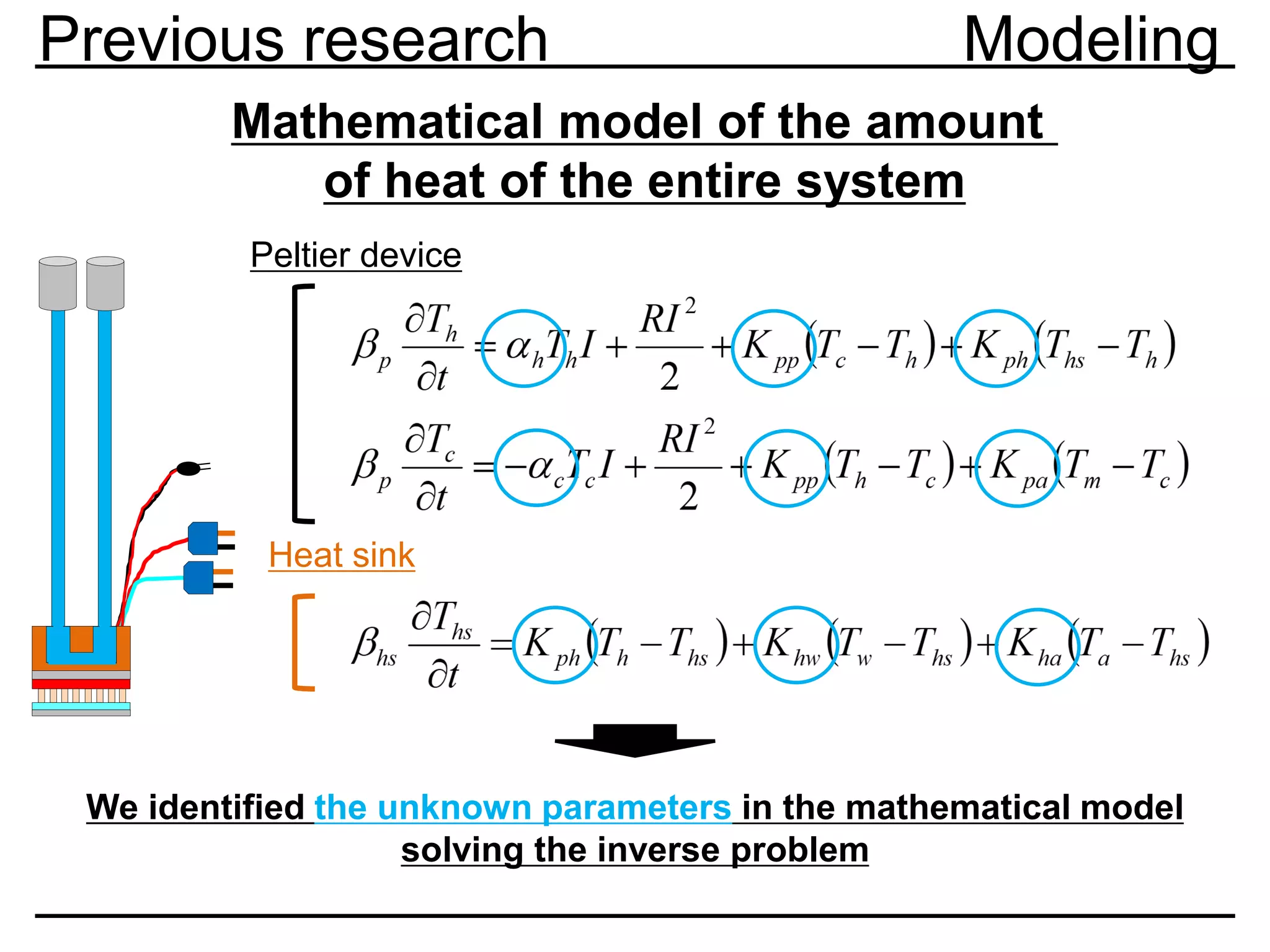
Previous research Modeling
0.0 0.2 0.4 0.6 0.8 1.0 1.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
MeanError[%/point]
Input voltage [V]
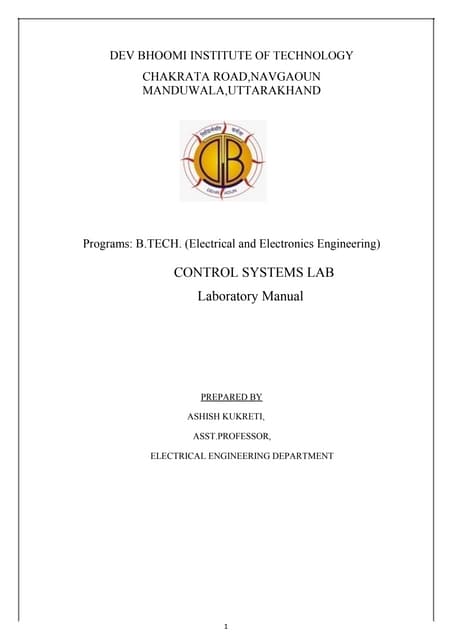
The relative difference per-point error of the
experimental and simulation value vs. input voltage
1.16 % / point
Average error
Error function
℃
s
Texp.
Tsim.](https://image.slidesharecdn.com/midtermreportm1-181103045002/75/Study-on-temperature-control-model-of-a-focal-cooling-human-physiological-system-10-2048.jpg)
![0 10 20 30 40 50
15
20
25
30
35
40
45
Exp.
Sim.
Temperature[
o
C]
Time [s]
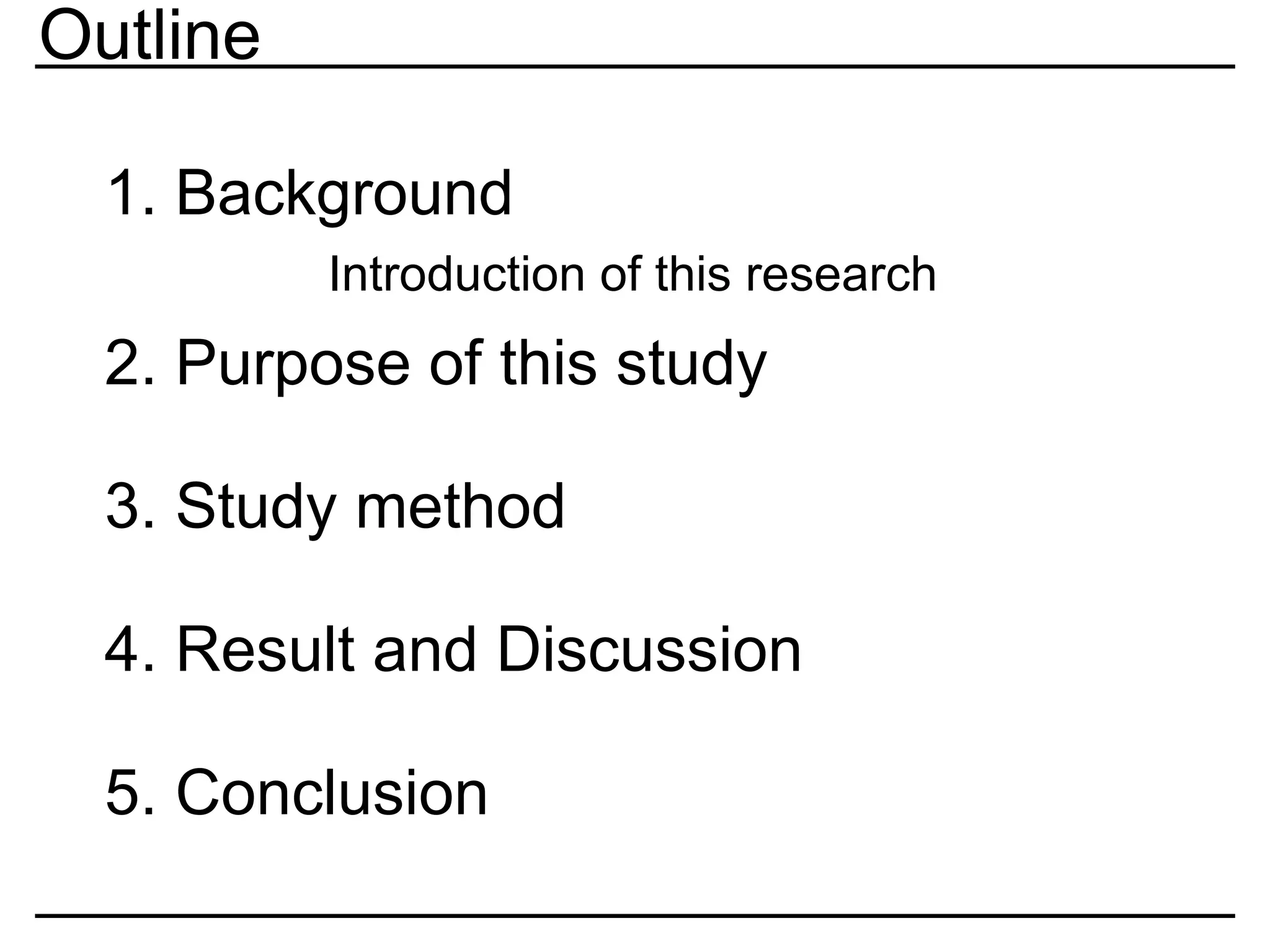
Previous research Modeling
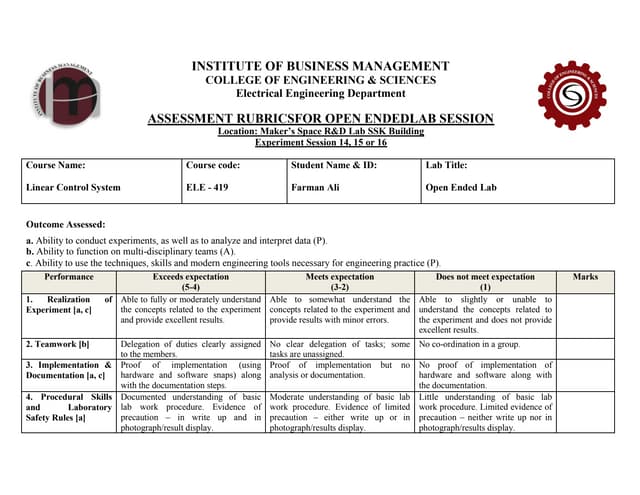
Comparison of the experimental and simulation
results in case of proportional gain Kp is 0.5
Result of the validation of the mathematical model
Proportional control [V]
The relative Error
of the controlled side
1 %/point (0.2~0.3 ℃)
Mathematical model can simulate
Experimental result in the error range
of the parameter identification](https://image.slidesharecdn.com/midtermreportm1-181103045002/75/Study-on-temperature-control-model-of-a-focal-cooling-human-physiological-system-11-2048.jpg)
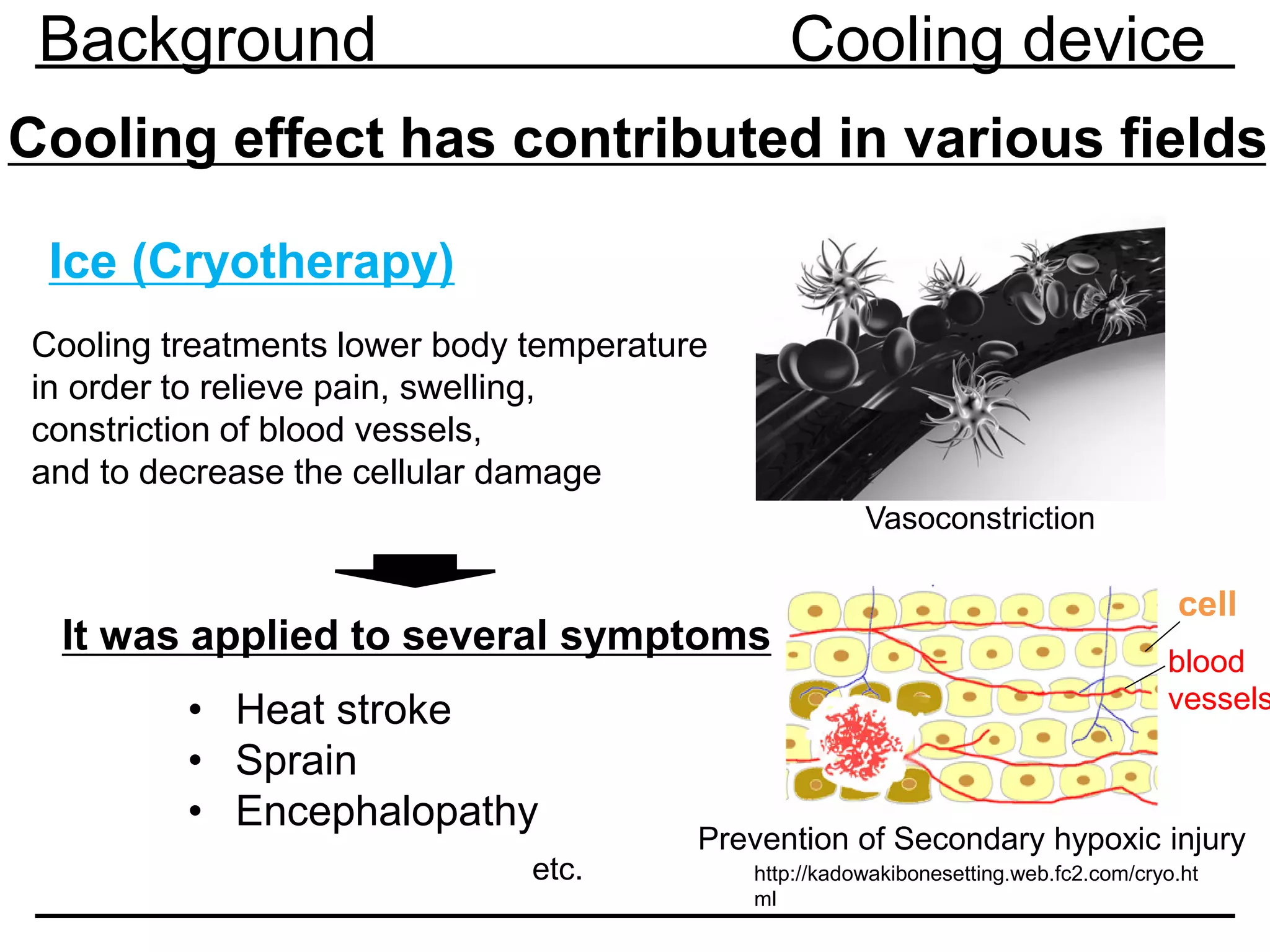
![Previous research Modeling
Comparison of the experimental and simulation
results in case of proportional gain Kp is 0.5
Result of the validation of the mathematical model
Using a temperature control based on ONLY Proportional action
Error in the temperature
of the controlled side
0.2~0.3 ℃
Mathematical model can simulate
Experimental based on the P-control
0 10 20 30 40 50
15
20
25
30
35
40
45
Exp.
Sim.
Temperature[
o
C]
Time [s]
Controlled temperature reaches
a balance away from the target](https://image.slidesharecdn.com/midtermreportm1-181103045002/75/Study-on-temperature-control-model-of-a-focal-cooling-human-physiological-system-12-2048.jpg)
![Previous research Modeling
Comparison of the experimental and simulation
results in case of proportional gain Kp is 0.5
Using a temperature control based on ONLY Proportional action
Error in the temperature
of the controlled side
0.2~0.3 ℃
Mathematical model can simulate
Experimental based on the P-control
0 10 20 30 40 50
15
20
25
30
35
40
45
Exp.
Sim.
Temperature[
o
C]
Time [s]
Controlled temperature reaches
a balance away from the target
General temperature control.
⚫ To eliminate the steady-state error
⚫ To improve the stability of the system
In order to adapt to a living body,
accuracy of the cooling temperature is an important factor
PI,PD, or PID control
P : Proportional action
I : Integral action
D : Derivative action
Is used as needed in the temperature control](https://image.slidesharecdn.com/midtermreportm1-181103045002/75/Study-on-temperature-control-model-of-a-focal-cooling-human-physiological-system-13-2048.jpg)
![PI control
[V]
Input voltage
25
32 ~ 33
Time [s]
Temperature [℃]
Cooling start Cooling end
10 50
Heat side
Cool side
controlled
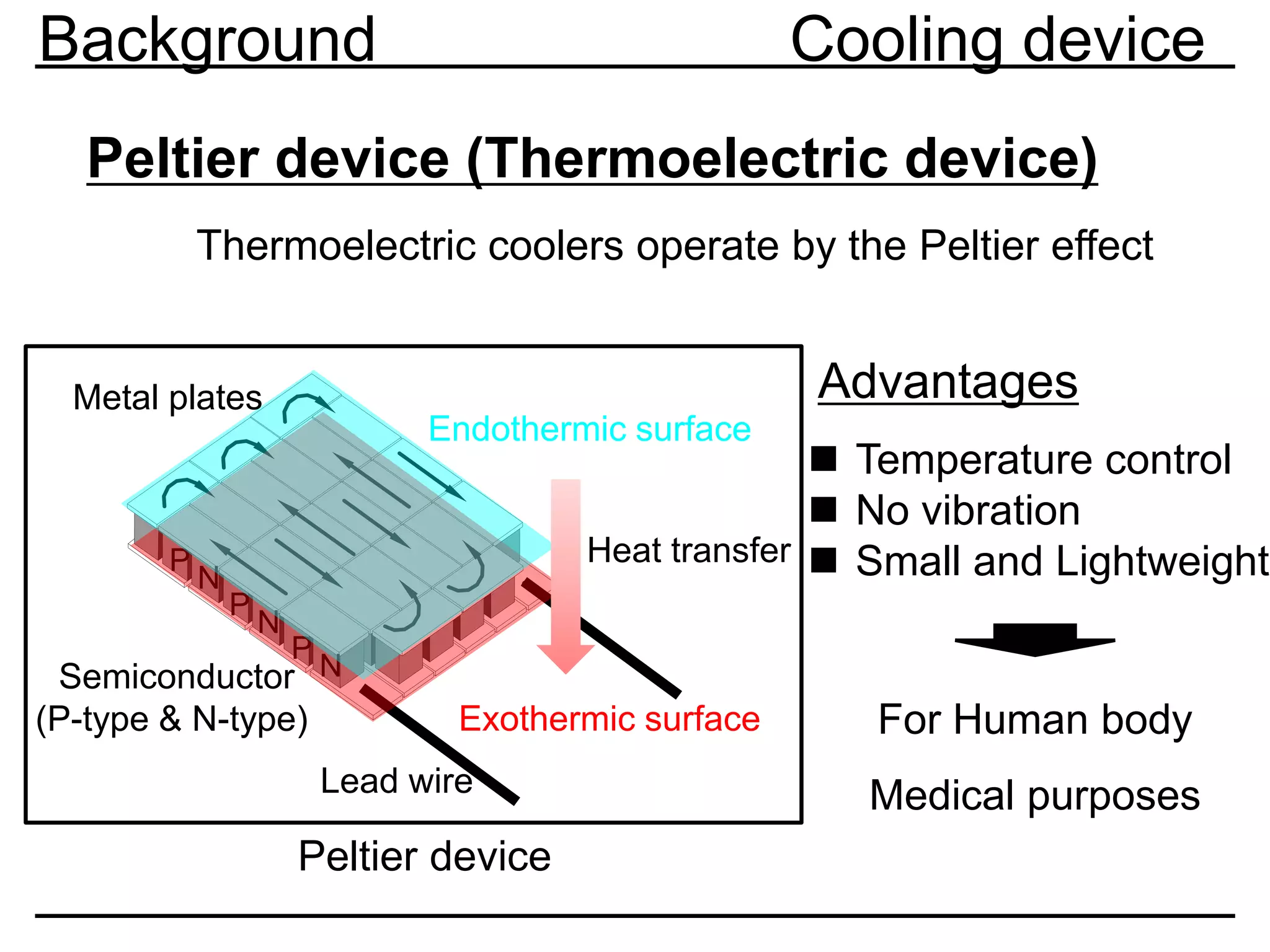
Evaluation of the model Exp.& Sim.
Proportional gain Integral gainControl error
(0.5) 15.0
30.0
50.0
Condition of the experiment and simulation](https://image.slidesharecdn.com/midtermreportm1-181103045002/75/Study-on-temperature-control-model-of-a-focal-cooling-human-physiological-system-16-2048.jpg)
![0 10 20 30 40 50
15
20
25
30
35
40
45
Exp.
Sim.
Temperature[
o
C]
Time [s]
An example of result in case of proportional
gain is 0.5 and integral gain is 15.0
Ki Controlled side Both sides
15.0 0.66 1.92
30.0 0.24 1.23
50.0 0.45 1.48
Relative error per-point of the results [%/point]
The average error in the parameter
identification is 1.16%/point
The relative error in the both sides is nearly equal
to the time of the parameter identification
It is to be sufficiently possible simulated in the error
range at the time of the parameter identification
Evaluation Result & discussion](https://image.slidesharecdn.com/midtermreportm1-181103045002/75/Study-on-temperature-control-model-of-a-focal-cooling-human-physiological-system-17-2048.jpg)

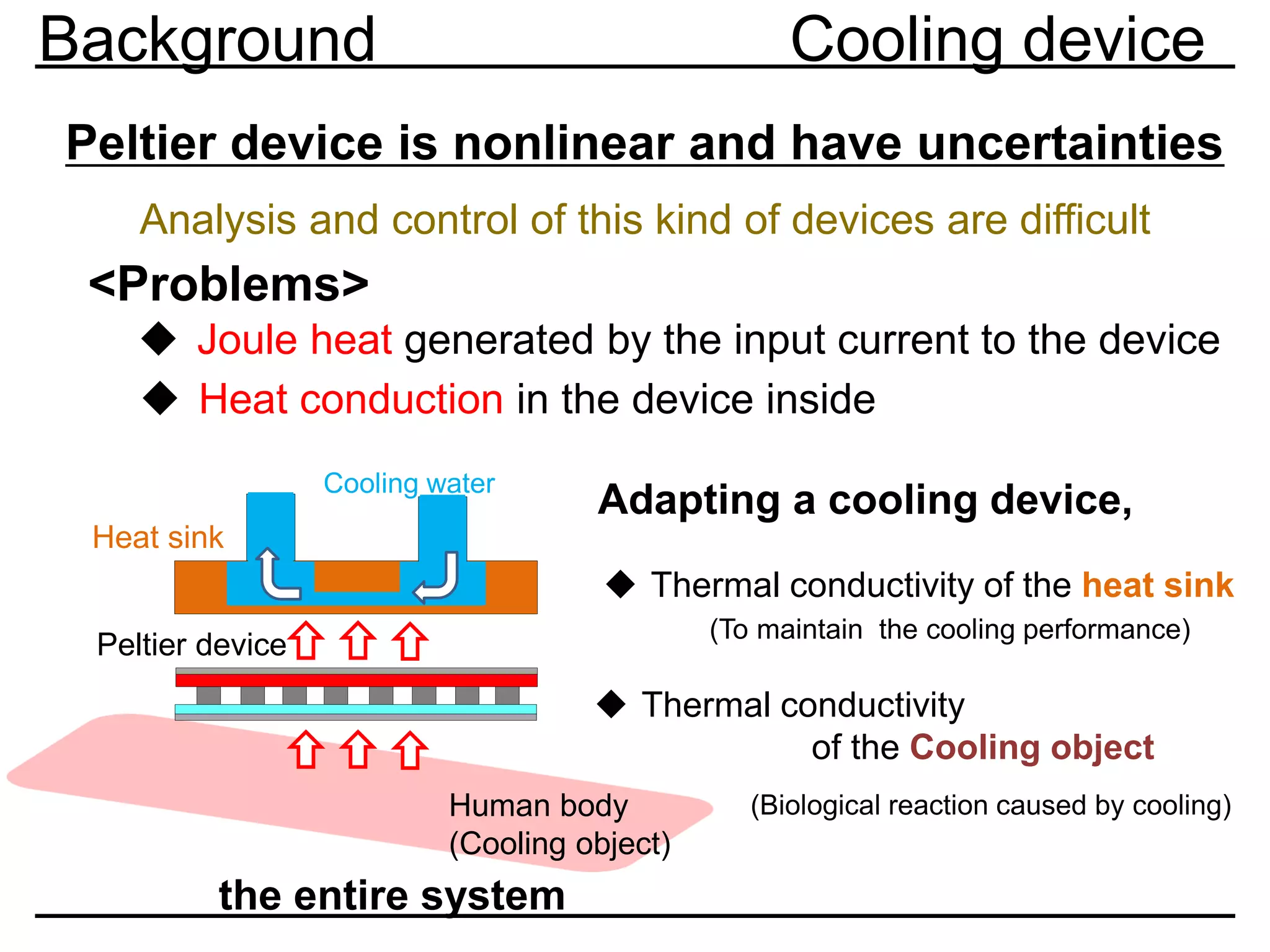
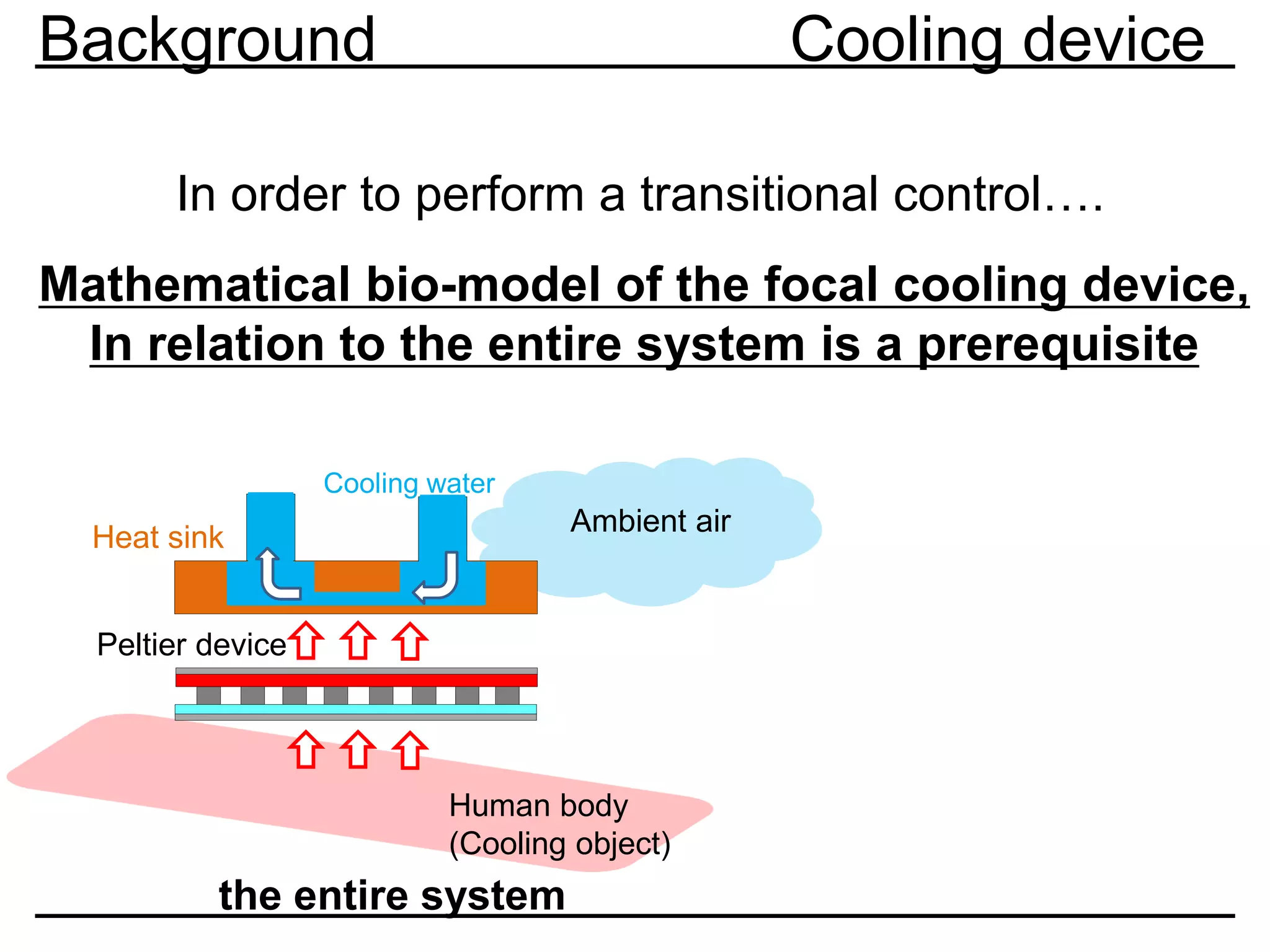
This study developed a mathematical model to simulate temperature control of a focal cooling device using a Peltier module on human skin. Experiments using a phantom validated the model, with errors within 1.16% compared to proportional control simulations. Adding integral control improved stability and reduced steady-state error to within 0.45-1.92% of experimental temperatures. Future work will refine model parameters and test new devices to enable precise temperature regulation for medical applications.








































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)












