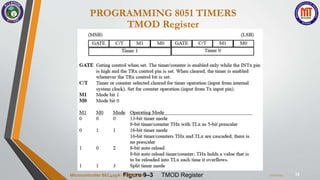
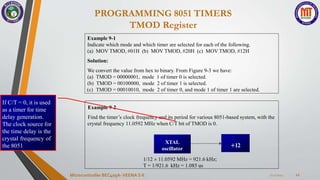
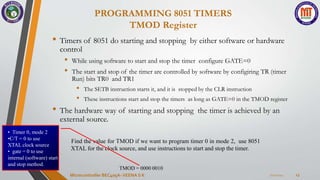
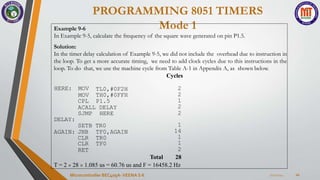
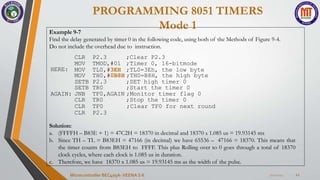
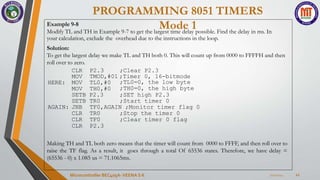
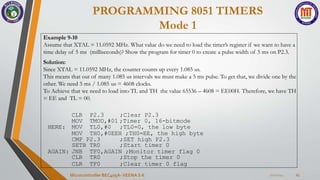
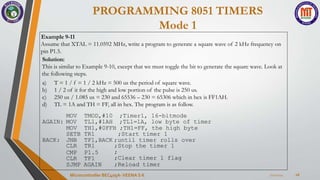
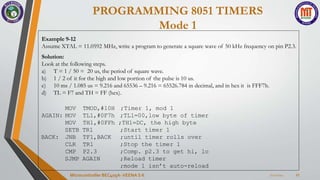
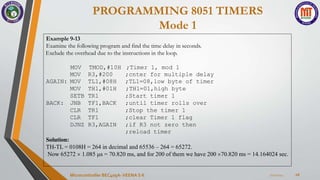
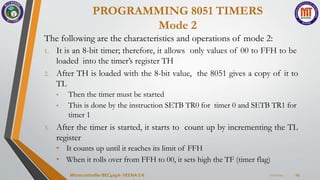
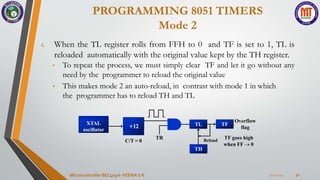
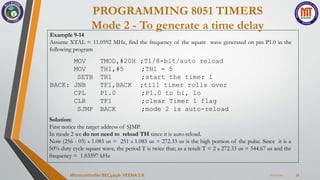
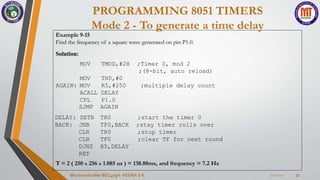
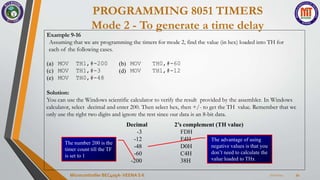
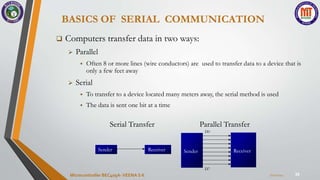
The document outlines the educational objectives and specific outcomes for a microcontroller course centered on the 8051 architecture. It details the functionalities of timers and counters in the 8051, along with programming techniques for various modes and applications, including data handling through serial communication. Additionally, the document provides examples and calculations related to timer delays and square wave generation, utilizing the unique features of the 8051 microcontroller.